Archives: Solution Manual
Accounting Chapter 2 The company is a corporation since it maintains
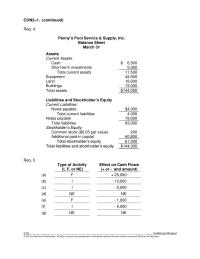
CON2–1. (continued) Req. 4 Penny’s Pool Service & Supply, Inc. Balance Sheet March 31 Assets Current Assets: Cash $ 6,500 Short-term investments 5,000 Total current assets 11,500 Equipment 42,500 Land 18,000 Buildings 72,000 Total assets $144,000 Liabilities and Stockholder’s Equity […]

Accounting Chapter 2 This suggests that Apple has sufficient current
P2–5. (continued) Req. 5 Current = Current Assets = $134,609 = 1.19 Ratio Current Liabilities $113,350 For every $1 of short-term liabilities, Apple Inc. has approximately $1.19 of current assets. This suggests that Apple has sufficient current resources to pay […]

Accounting Chapter 2 Issuance Stock Purchases Property Plant And Equipment
E2–12. Req. 1 Transaction Brief Explanation 1 Issued common stock to shareholders for $45,000 cash. (Volz Cleaning is a corporation because it issues stock. Par value is $2.00 per share; $6,000 common stock amount divided by 3,000 shares issued equals […]
Accounting Chapter 2 Equipment Notes Payable Dividends Payable Common Stock
© 2020 by McGraw-Hill Education. All rights reserved. No reproduction or distribution without the prior written consent of McGraw–Hill Education. Chapter 2 Investing and Financing Decisions and the Accounting System ANSWERS TO QUESTIONS 1. The primary objective of financial reporting […]

Accounting Chapter 2 Analyze each of the following transactions of World
Chapter 02 – Investing and Financing Decisions and the Accounting System 2-32 HANDOUT 2 – 4, continued (i) Order a $900 computer, to be delivered in 90 days. Debit and credit the accounts affected Ensure the equation still balances and […]

Accounting Chapter 2 Yes Paid Cash Purchase Supplies Identify
Chapter 02 – Investing and Financing Decisions and the Accounting System 2-21 HANDOUT 2 – 1 SOLUTION ANALYZING TRANSACTIONS Analyze each of the following transactions of World Wide Webster by performing each of the following steps. Then, use the chart […]

Accounting Chapter 2 Identify The Account Affected Title Making Sure
Chapter 02 – Investing and Financing Decisions and the Accounting System 2-1 CHAPTER 2 INVESTING AND FINANCING DECISIONS AND THE ACCOUNTING SYSTEM Learning Objectives and Related Assignment Materials Learning Objectives Mini- Exercises Exercises Problems Alternate Problems Continuing Problem Cases and […]

Accounting Chapter 1 Equity Liabilities Accounts Payable Note Payable Bank
Financial Accounting, 10/e 1-17 Total liabilities and stockholders’ equity $159,400 © 2020 by McGraw-Hill Education. All rights reserved. No reproduction or distribution without the prior written consent of McGraw-Hill Education. P1–2. Req. 1 JAMES COOK LAWN SERVICE Income Statement For […]
Accounting Chapter 1 Revenues Cash Flow From Operating Activities Liabilities
© 2020 by McGraw-Hill Education. All rights reserved. No reproduction or distribution without the prior written consent of McGraw-Hill Education. Chapter 1 Financial Statements and Business Decisions ANSWERS TO QUESTIONS 1. Accounting is a system that collects and processes (analyzes, […]

Accounting Chapter 1 Account Element Income Statement Stockholders Equity
Chapter 01 – Financial Statements and Business Decisions 1-13 HANDOUT 1 – 1 TEAM PROJECT – OVERVIEW OF FINANCIAL STATEMENTS Complete the following table. Financial Statement Purpose Equation Statement of Stockholders’ Equity Balance Sheet Statement of Cash Flows Income Statement […]
Accounting Chapter 1 Structure Heading Includes Name The Entity Title
Chapter 01 – Financial Statements and Business Decisions 1-1 CHAPTER 1 FINANCIAL STATEMENTS AND BUSINESS DECISIONS Learning Objectives and Related Assignment Materials Learning Objectives Mini- Exercises Exercises Problems Alternate Problems Cases and Projects four basic financial statements and the way […]

Operating Systems Chapter 10 Homework A linear model for the system was derived in the text as
10080 CHAPTER 10. CONTROL-SYSTEM DESIGN: PRINCIPLES AND CASE STUDIES The total black-body radiation intensity, Ib, is obtained by integrating over all frequencies or wavelength [2] The black body emissive ‡ux is given by, qb(T) = C1 n25(eC2 nT 1);(23) where, […]

Operating Systems Chapter 10 Homework Let Denote The Run Number The
10060 CHAPTER 10. CONTROL-SYSTEM DESIGN: PRINCIPLES AND CASE STUDIES -5 -5 –15 –15 –25 –25 10-2 10-1 100101 Frequency (rad/sec) 10-2 10-1 100101 Frequency (rad/sec) –30 –20 –10 Gain dB –30 –20 –10 Gain dB Problem 10.16: Bode magnitude for […]

Operating Systems Chapter 10 Homework The Signal The Plant Noise And May
10040 CHAPTER 10. CONTROL-SYSTEM DESIGN: PRINCIPLES AND CASE STUDIES 0 Imaginary Axis –0.01 –0.03 –0.05 –0.04 – 0.03 – 0.02 –0.01 00.01 –0.04 Real Axis –0.02 0.01 0.02 0.04 Root Locus Problem 10.13: Root locus for balloon altitude control system […]

Operating Systems Chapter 10 Homework From The Gure The Phase Margin 108
10020 CHAPTER 10. CONTROL-SYSTEM DESIGN: PRINCIPLES AND CASE STUDIES –20 Magnitude ( dB) –20 Magnitude ( dB) –60 –60 –135 –90 –135 –90 10 0 10 1 10 2 10 3 –180 10 0 10 1 10 2 10 3 […]

Operating Systems Chapter 10 Homework If the disturbance wis a constant
Solutions Manual&KDSWHU 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin J. David Powell Abbas Emami-Naeini . Assisted by: H.K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. Safai L. Kobayashi […]

Operating Systems Chapter 9 Homework The corresponding time domain responses are shown
0.4 0.2 –0.1 –0.3 –0.5 –0.4 –0.2 00.2 0.4 0.6 0.8 1 –0.4 –0.2 0 0.1 0.3 0.5 y x Trajectory for x(0) = 1,y(0) = 0:5in the Liénard (x,y) plane for “= 1:0. The corresponding time domain responses are […]

Operating Systems Chapter 9 Homework First Investigate The Equilibrium Points Next Investigate
9040 CHAPTER 9. NONLINEAR SYSTEMS Fig 6 38:pdf Phase-plane trajectory of limit cycle for Problem 9.22. From the geometry of the limit cycle (see above Figure), At point A, A0=I 2N_ 2 A;(3) A+_ A= 0;(4) At point B, _ […]

Operating Systems Chapter 9 Homework Derive the describing function for the ideal contactor controller
9020 CHAPTER 9. NONLINEAR SYSTEMS end; 0.8 0.8 0.4 0.4 1 1.2 1 1.2 0 1 2 3 4 5 6 7 0 0.2 0 1 2 3 4 5 6 7 0 0.2 0.6 1.4 Describing function for quantizer […]

Operating Systems Chapter 9 Homework The circuit shown in Fig. 9.57 has a nonlinear conductance G
Solutions Manual: Chapter 9 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin J. David Powell Abbas Emami-Naeini . Assisted by: H.K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. Safai […]

Operating Systems Chapter 8 Homework Although Stated The Solution Problem 527 That
8020 CHAPTER 8. DIGITAL CONTROL 10. Single-axis Satellite Attitude Control: Satellites often require attitude con- trol for proper orientation of antennas and sensors with respect to Earth. Figure 2.7 shows a communication satellite with a three-axis attitude- control system. To […]

Operating Systems Chapter 8 Homework Discretize The Pid Controller Using A Tustins
8000 Solutions Manual: Chapter 8 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin .J. David Powell .Abbas Emami-Naeini Assisted by: H. K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. […]

Operating Systems Chapter 7 Homework The Performance The System Shown Step Change
7100 CHAPTER 7. STATE-SPACE DESIGN –30 –20 –10 Magnitude ( dB) 90 –30 –20 –10 Magnitude ( dB) 90 Phase (deg) Phase (deg) 10 -1 10 0 10 1 10 2 0 45 Bode D iag ram Frequency (rad/sec) 10 […]

Operating Systems Chapter 7 Homework The bandwidth of the spring is about 30 rad/sec
7080 CHAPTER 7. STATE-SPACE DESIGN c) Could both state variables of the system be estimated if only a measurement of _ywas available? d) Design a full-state feedback controller with roots at s=20 20j. e) Would it be reasonable to design […]

Operating Systems Chapter 7 Homework Equating With The Desired Characteristic Equation 2s
7060 CHAPTER 7. STATE-SPACE DESIGN The characteristic equation of the reduced order estimator is then given by, Problems and Solutions for Section 7.8: Compensator De– sign: Combined Control Law and Estimator 48. A certain process has the transfer function G(s) […]

Operating Systems Chapter 7 Homework Using the Final Value Theorem,
7040 CHAPTER 7. STATE-SPACE DESIGN Now, R(s) = a s2; The tracking error is given by E(s) = [1 T(s)]R(s): Since the system is Type I, its DC gain is unity, so that DC gain =T(0) = CA1B= 1: E(s) […]

Operating Systems Chapter 7 Homework Solution A Because The System Block Lower
7020 CHAPTER 7. STATE-SPACE DESIGN (b) Y(s) U(s)=G(s) = 3s+ 4 s2+ 2s+ 2: This transfer function can be realized in Controller canonical form as shown below. From the figure, we have, The block diagram for observer canonical form is […]

Operating Systems Chapter 7 Homework Write the dynamic equations describing the circuit in Fig
Solutions Manual: Chapter 7 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin J. David Powell Abbas Emami-Naeini . Assisted by: H.K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. Safai […]

Operating Systems Chapter 6 Homework The Nichols Chart Below Shows That 15
6180 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD -300 -200 -100 Phase (deg) -300 -200 -100 Phase (deg) 100101102 10-1 ω (rad/sec) Bode plot 100101102 10-1 ω (rad/sec) Bode plot 100101102 -400 0 ω (rad/sec) 100101102 10-1 ω (rad/sec) Bode plot […]

Operating Systems Chapter 6 Homework The low GM is caused by the resonance being close
6160 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD –40 –40 –80 –80 0 90 0 90 –180 Phase (deg) –180 Phase (deg) –100 –60 –20 Magnitude (dB) 10 -4 10 -3 10 -2 10 -1 10 0 10 1 10 2 […]

Operating Systems Chapter 6 Homework In fact, the specs are exceeded at the low frequency side
6140 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD -50 -50 -150 -150 -250 -250 100 100 100 100 10-1 100101102103 105 ω (rad/sec) Magnitude Uncompensated Bode Plot 10-1 100101102103 105 ω (rad/sec) Magnitude Uncompensated Bode Plot 10-1 100101102103 -300 -200 -100 […]

Operating Systems Chapter 6 Homework From Fig 650 See That Frequency Radsec
6120 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD Note : Actual PM is as follows : © 2015 Pearson Education, Inc., Upper Saddle River, NJ. All rights reserved. This publication is protected by Copyright and written permission should be obtained from […]

Operating Systems Chapter 6 Homework The Closed loop System Stable
6100 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD Figure 6.92: Block diagram for Problem 32: (a) unity feedback; (b) H(s)in feedback (e) Sketch a root locus for the system shown in Fig. 6.92(b).. How does it differ from the one in […]

Operating Systems Chapter 6 Homework Will The System Stable The Gain Lowered
23. Nyquist plots and their classical plane curves: Determine the Nyquist plot using Matlab for the systems given below with K= 1 and verify that the beginning point and end point for the j! > 0portion have the correct magnitude […]

Operating Systems Chapter 6 Homework That means that no matter how much the gain is lowered
0.6 0 Imaginary Axis –0.2 –0.6 –16 –14 –12 –10 -8 -6 -4 -2 0 2 –0.8 –0.4 0.2 0.4 0.8 Real Axis (b) KG(s) = K(s+ 1) s2(s+ 10) =K 10 s+ 1 s2s 10 + 1 © 2015 […]

Operating Systems Chapter 6 Homework A certain system is represented by the asymptotic Bode diagram
Figure 6.85: Magnitude portion of Bode plot for Problem 9 10-2 10-1 100101102 ω (rad/sec) 10-2 10-1 100101102 ω (rad/sec) 10-2 10-1 100101102 ω (rad/sec) 10-2 10-1 100101102 ω (rad/sec) 10-2 10-1 100101102 ω (rad/sec) 10-2 10-1 100101102 ω (rad/sec) […]

Operating Systems Chapter 6 Homework After completing the hand sketches verify your result
6020 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD -100 -50 0 Phase (deg) -100 -50 0 Phase (deg) 10-1 100101102 ω (rad/sec) Bode plot for Prob. 6.5 (c) 10-1 100101102 -150 ω (rad/sec) 10-1 100101102 ω (rad/sec) Bode plot for Prob. […]

Operating Systems Chapter 6 Homework That portion of the asymptotes will be located
6000 Solutions Manual: Chapter 6 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin J. David Powell Abbas Emami-Naeini .Assisted by: H. K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. […]

Operating Systems Chapter 5 Homework In the plot, the desired pole locations are marked with a dot
5075 (c) Using proportional control (Dc(s) = K), the velocity constant is Kv= lim s!0sK 1 s(s2+ 51s+ 550) =K 550 Therefore Kv= 12 can be obtained by setting K= 6600. With this value, the dominant roots are at s=4:711:69j, […]

Operating Systems Chapter 5 Homework Using The Final Value Theorem The Steady state
5060 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD 37. We wish to design a velocity control for a tape-drive servomechanism. The transfer function from current I(s)to tape velocity (s)(in millimeters per millisecond per ampere) is (s) I(s)=15(s2+ 0:9s+ 0:8) (s+ 1)(s2+ […]

Operating Systems Chapter 5 Homework we need a lag gain of about 6:5
25. Assume that the unity feedback system of Fig. 5.53 has the open-loop plant G(s) = 1 s(s+ 3)(s+ 6): Design a lag compensation to meet the following specifications: The step response settling time is to be less than 5 […]

Operating Systems Chapter 5 Homework Because Gt This Function Real And Negative
5020 CHAPTER 5. THE ROOT-LOCUS DESIGN METHOD 12. Sketch the root locus for the characteristic equation of the system for which L(s) = (s+ 2) s2(s+ 5); and determine the value of the root-locus gain for which the complex con- […]

Operating Systems Chapter 5 Homework Set up the listed characteristic equations in the form suited
5000 Solutions Manual: Chapter 5 7th Edition Feedback Control of Dynamic Systems Gene F. Franklin J. David Powell Abbas Emami-Naeini . Assisted by: H.K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. Everett R. Fuller T. Iwata V. Jones F. […]

Operating Systems Chapter 4 Homework From The Impulse Response Sec From Table
4051 35. Automatic ship steering is particularly useful in heavy seas when it is important to maintain the ship along an accurate path. Such a control system for a large tanker is shown in Fig. 4.46, with the plant transfer […]

Operating Systems Chapter 4 Homework Type The Error Step Unit Ramp The
Figure 4.43: Control system for Problem 4.30 (c) What is the system type and error constant with respect to reference tracking? (d) What is the system type and error constant with respect to distur- bance rejection? Solution: (a) Y(s) R(s)=10(kI+kPs) […]

Operating Systems Chapter 4 Homework Let u2 be the signal coupling systems 1 and 2
4020 CHAPTER 4. CHAPTER 4: A FIRST ANALYSIS OF FEEDBACK (s)is the characteristic polynomial, same as in (i) (denominator in (i)). yss = [lim s!0s:W2(s):sl1]Qip1i Qiz1i Type `1 18. One possible representation of an automobile speed-control system with integral control […]

Operating Systems Chapter 4 Homework If S is the sensitivity of the unity feedback system to
4000 Solutions Manual .Chapter 4 7th Edition Feedback Control of Dynamic Systems . . Gene F. Franklin . J. David Powell . Abbas Emami-Naeini . . . . Assisted by: H. K. Aghajan H. Al-Rahmani P. Coulot P. Dankoski S. […]

Operating Systems Chapter 3 Homework Find the range of K for which all the roots of the following
3111 (d) The Routh array is, s3: 1 20 s2: 1 78 s1:58 s0: 78 There are two sign changes in the first column of the Routh array. Therefore, there are two roots not in the LHP. (e) a(s) = […]

Operating Systems Chapter 3 Homework Using Matlab Nd Value That Will Provide
3100 CHAPTER 3. DYNAMIC RESPONSE 49. Consider the following second-order system with an extra pole: H(s) = !2 np (s+p)(s2+ 2!ns+!2 n): Show that the unit step response is y(t) = 1 + Aept +Bet sin(!dt); where A=!2 n !2 […]

Operating Systems Chapter 3 Homework The results compare favorably with the predictions made
1 1.5 1 1.5 1 1.5 1 1.5 0100 200 300 400 0 0.5 Max overshoot = 0.08 Rise time = 161.10 sec 0100 200 300 400 0 0.5 Max overshoot = 7.03 Rise time = 76.30 sec 0100 200 […]