1123
11–1.
SOLUTION
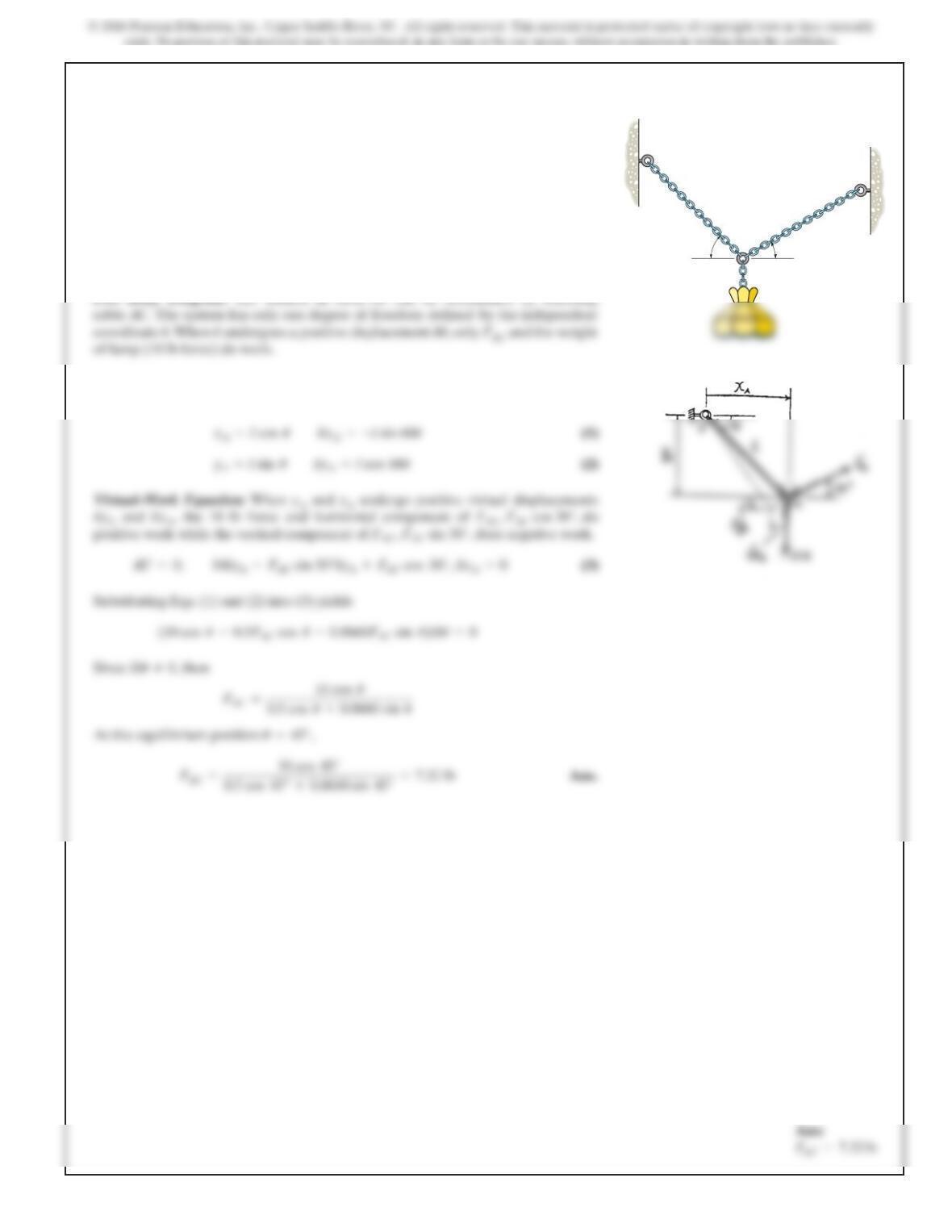
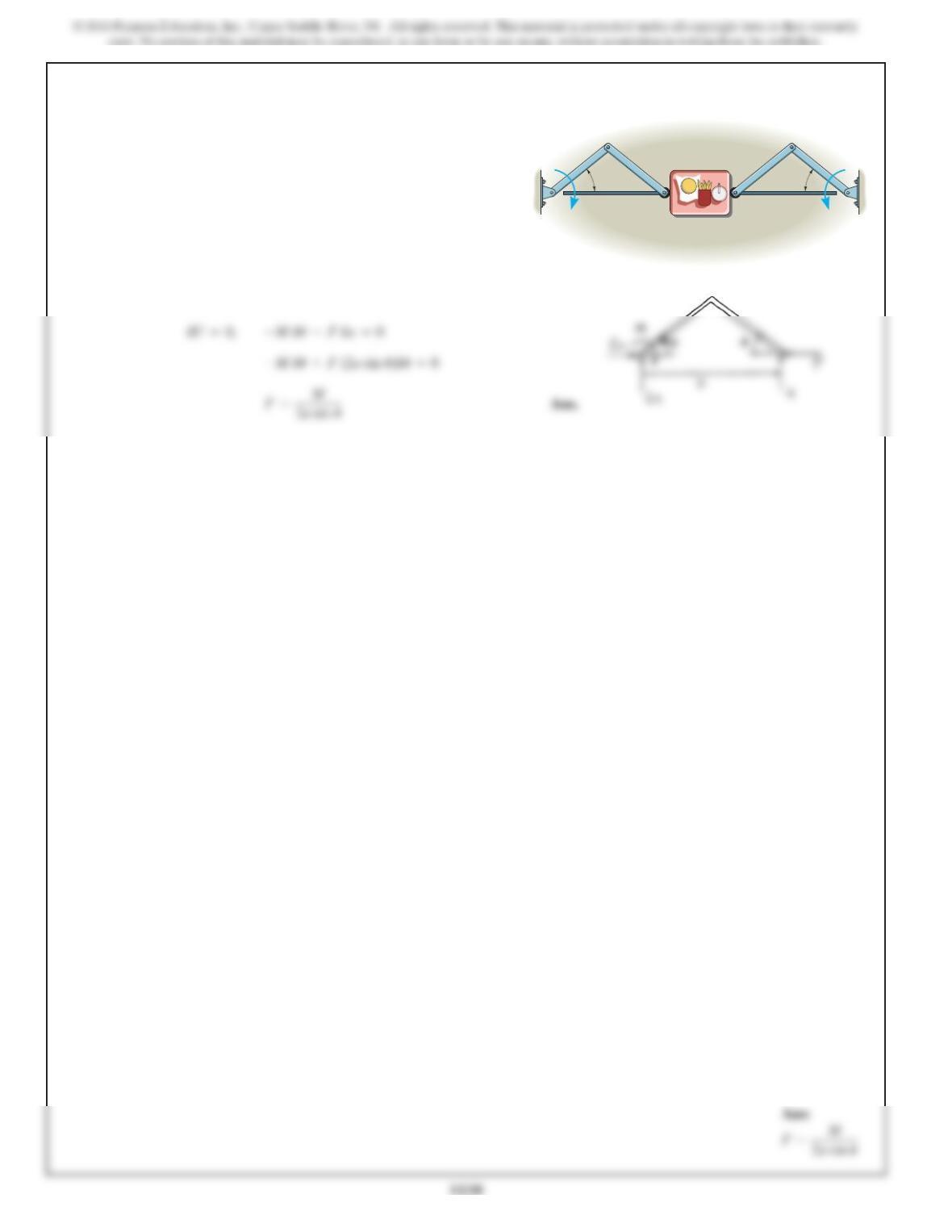
Free Body Diagram: The tension in cable AC can be determined by releasing
cable AC .The system has only one degree of freedom defined by the independent
coordinate .When undergoes a positive displacement ,only FAC and the weight
of lamp (10 lb force) do work.
Virtual Displacement: Force FAC and 10 lb force are located from the fixed point B
using position coordinates yAand xA.
duuu
Use the method of virtual work to determine the tensions in
cable AC.The lamp weighs 10 lb.
B
A
C
45°30°
FAC =7.32
lb
11–2.
SOLUTION
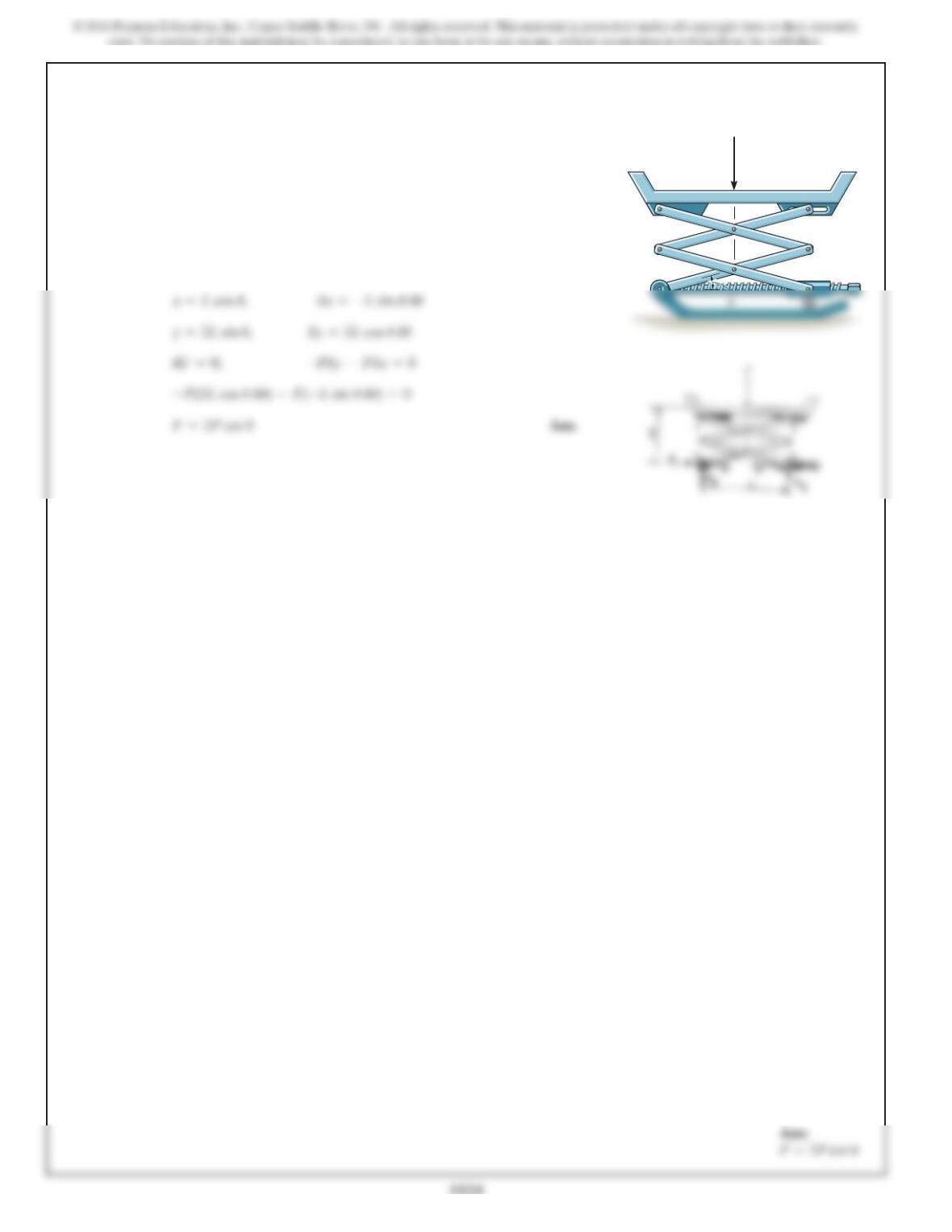
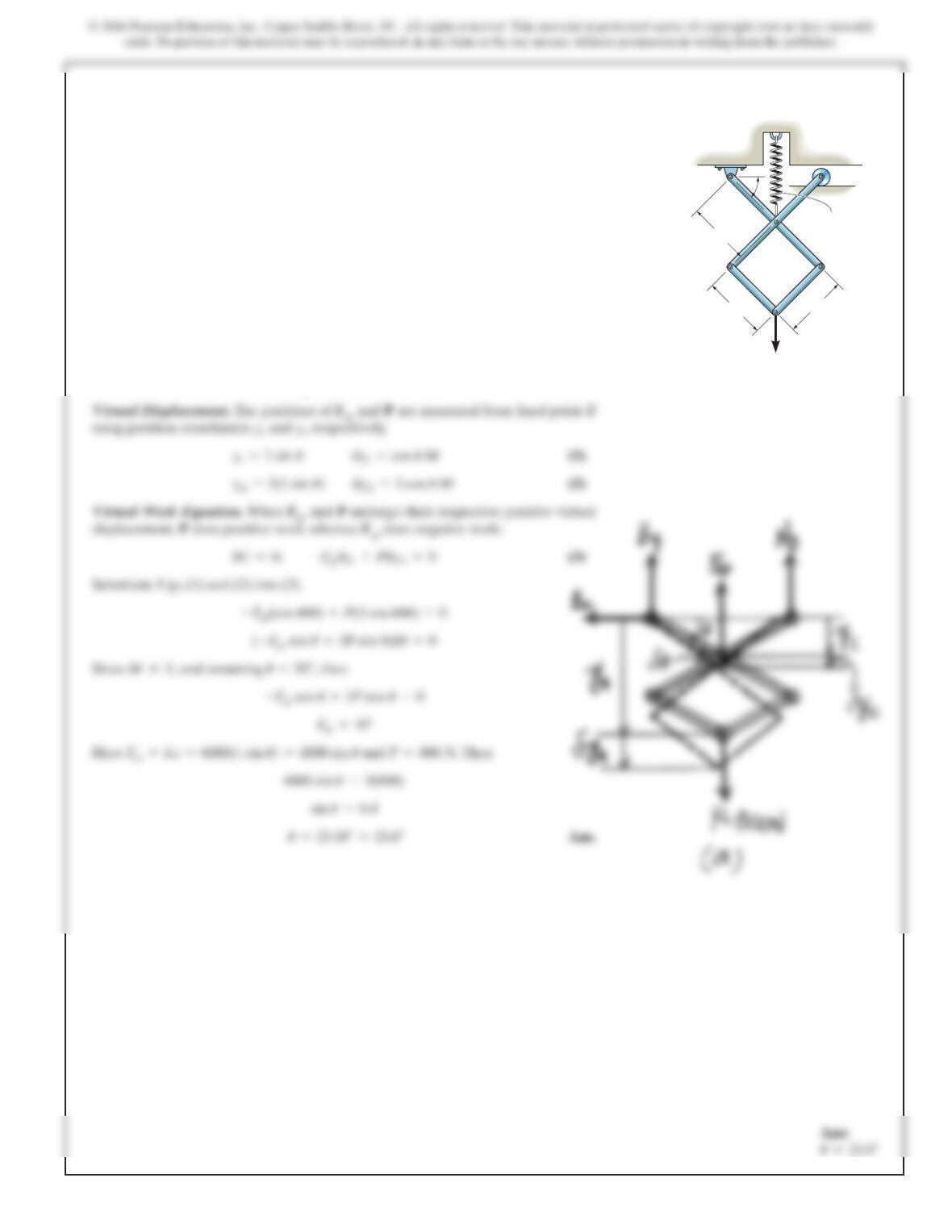
x=Lcos u,dx=-Lsin udu
The scissors jack supports a load P. Determine the axial
force in the screw necessary for equilibrium when the jack
is in the position Each of the four links has a length Land
is pin-connected at its center.Points Band Dcan move
horizontally.
u.
CD
AB
P
u
11–3.

*11–4.
T
h
e
di
s
k
h
as a we
i
g
h
t of 10
lb
an
d
i
s su
bj
ecte
d
to a vert
i
ca
l
force and a couple moment
Determine the disk’s rotation if the end of the spring
w
raps around the periphery of the disk as the disk turns.
The spring is originally unstretched.
u
M=8lb#ft.P=8lb
SOLUTION
Since
W
Ans:
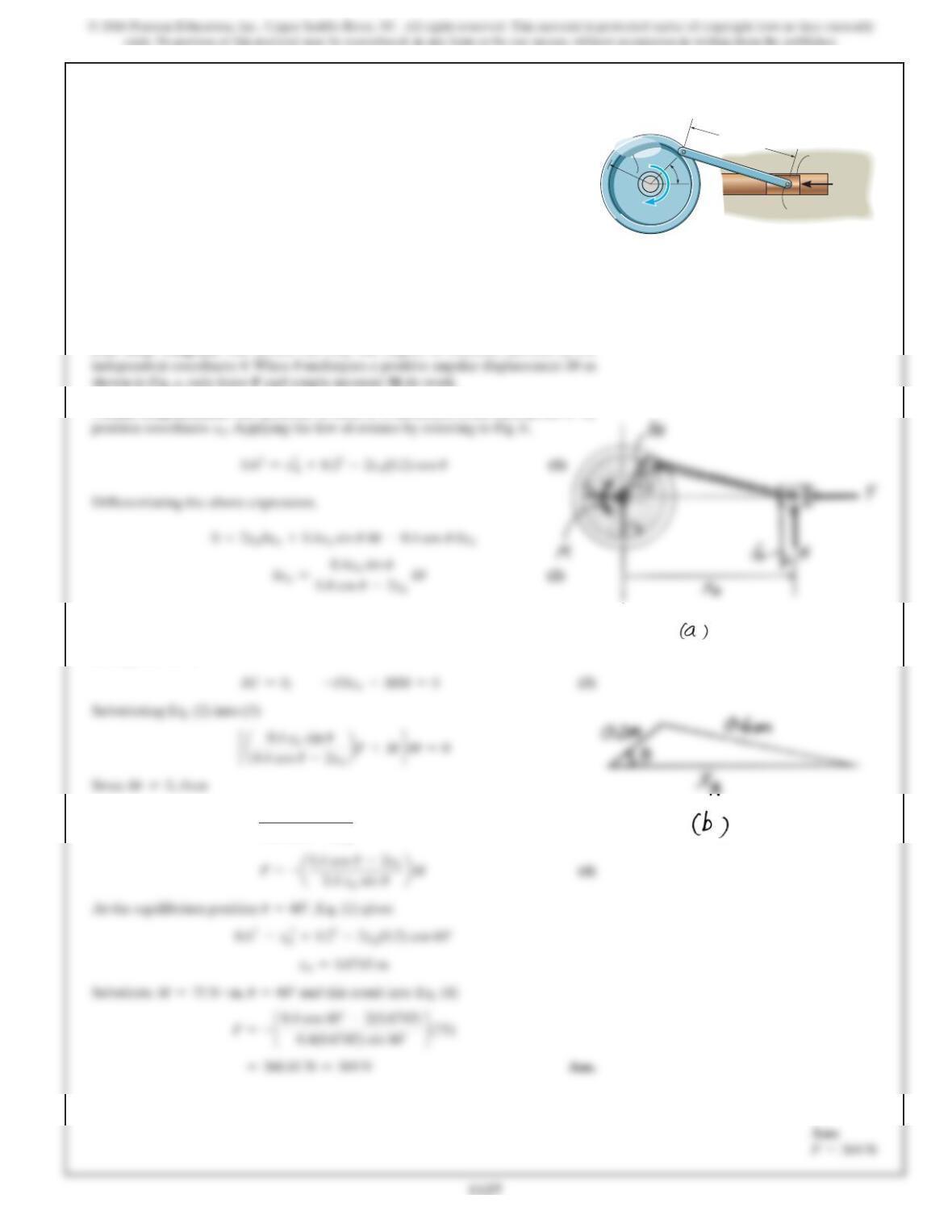
11–5.
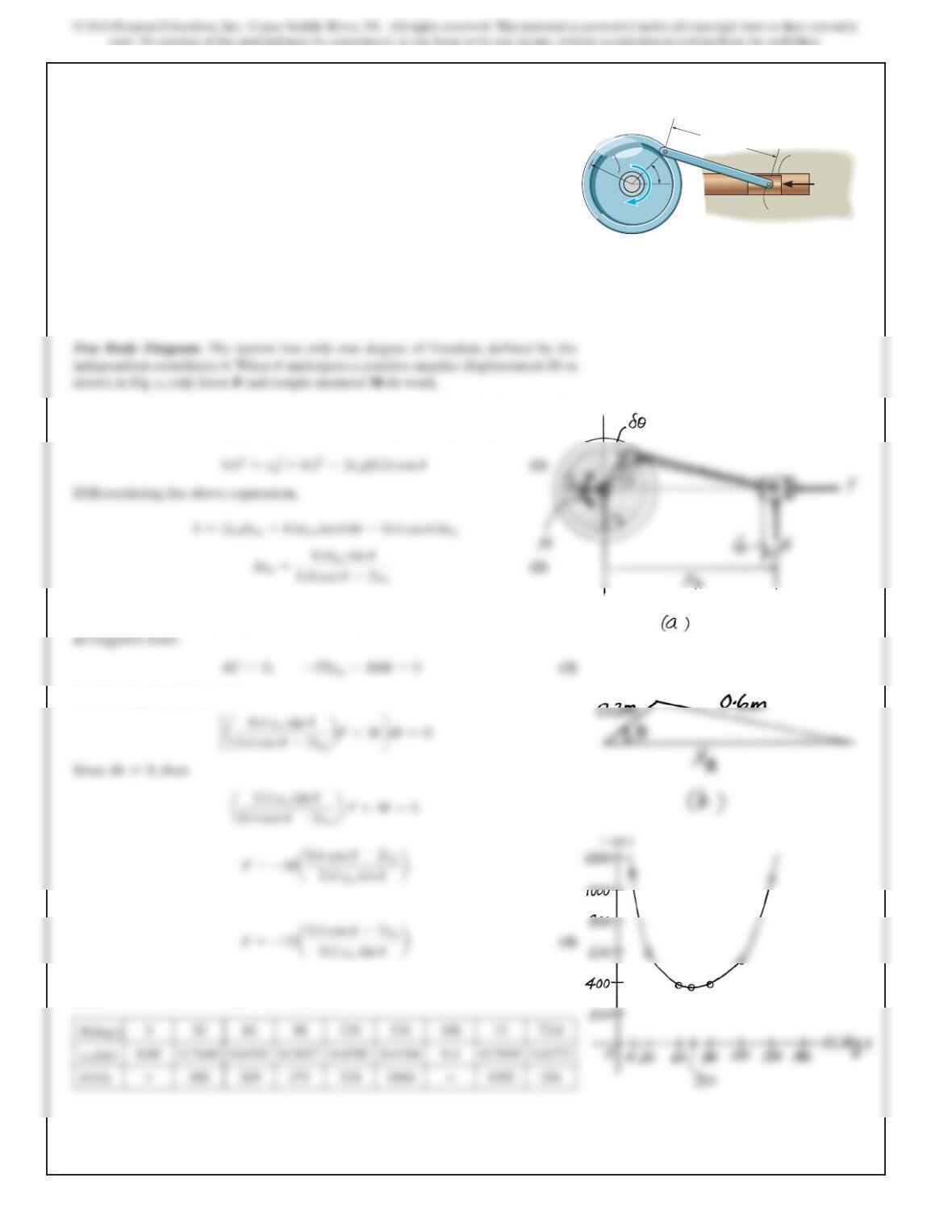
The punch press consists of the ram R, connecting rod AB,
and a flywheel. If a torque of
M=75 N #m
is applied to the
flywheel, determine the force F applied at the ram to hold
the rod in the position
u=60°.
SOLUTION
Free Body Diagram. The system has only one degree of freedom, defined by the
independent coordinate
u
. When
u
undergoes a positive angular displacement
du
as
shown in Fig. a, only force F and couple moment M do work.
Virtual Displacement. The position of force F is measured from fixed point O by
position coordinate
xA
. Applying the law of cosines by referring to Fig. b,
Differentiating the above expression,
Virtual–Work Equation. When point A undergoes a positive virtual displacement,
and the ywheel undergoes positive virtual angular displacement
du
, both F and M
do negative work.
0.4 x
A
sin
u
0.4 cos u
–
2x
A
F+M=0
F
200 mm
M
B
R
A
600 mm
u
1128
11–6.
The flywheel is subjected to a torque of
M=75 N #m
.
Determine the horizontal compressive force F and plot the
result of F (ordinate) versus the equilibrium position
u
(abscissa) for
0°…u…180°.
SOLUTION
u
u
du
Virtual Displacement. The position of force F is measured from fixed point O by
position coordinate
xA
. Applying the law of cosines by referring to Fig. b,
Differentiating the above expression,
Virtual–Work Equation. When point A undergoes a positive virtual displacement
and the ywheel undergoes positive virtual angular displacement
du
, both F and M
Substituting Eq. (2) into (3)
Here,
M=75 N #m.
Then
Using Eq. (1) and (4), the following tabulation can be computed. Subsequently, the
graph of F vs
u
shown in Fig. c can be plotted
F
200 mm
M
B
R
A
600 mm
u
11–7.
SOLUTION
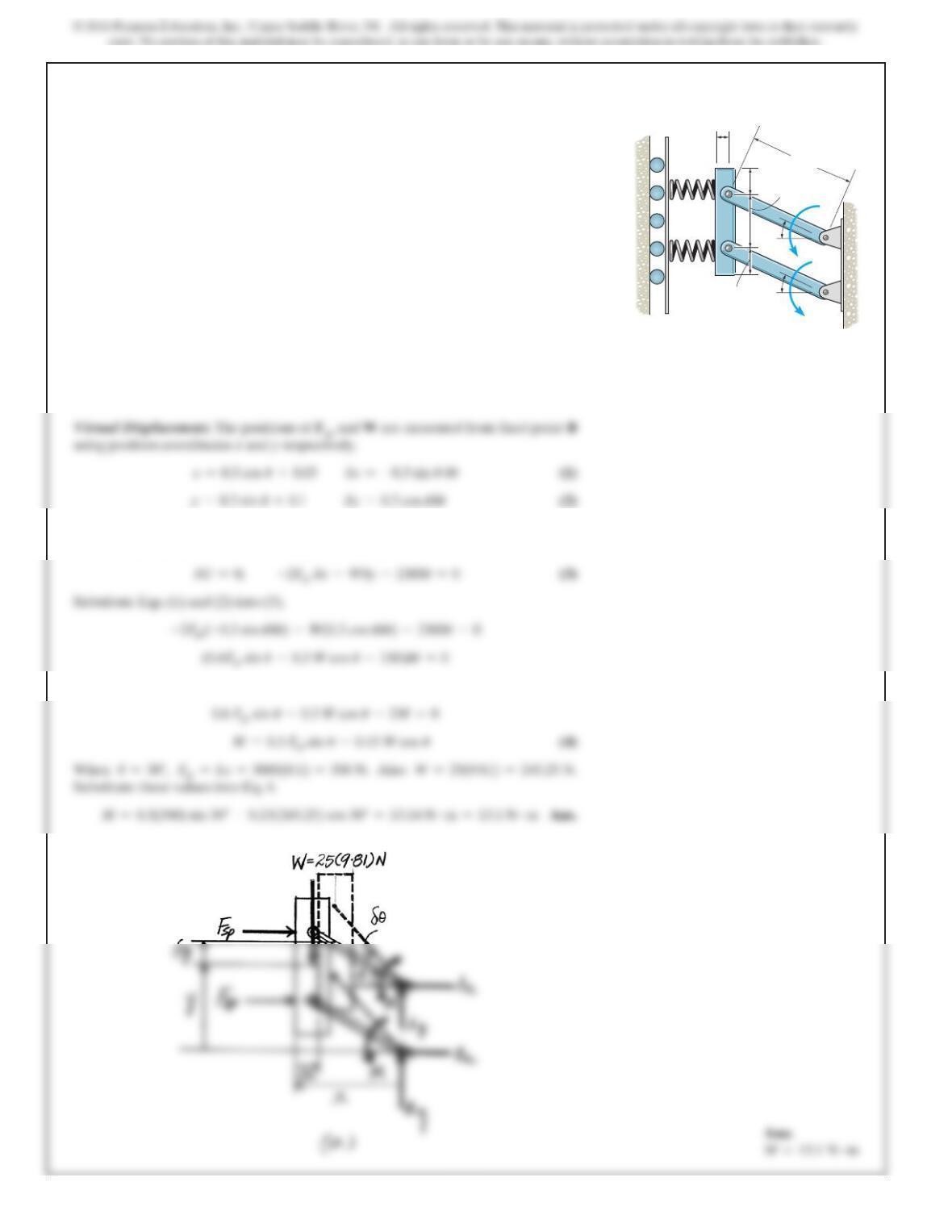
Free Body Diagram: The system has only one degree of freedom defined by the
independent coordinate .When undergoes a positive displacement ,only the
spring forces Fsp,the weight of the block (50 lb),the weights of the links (10 lb) and
the couple moment Mdo work.
duuu
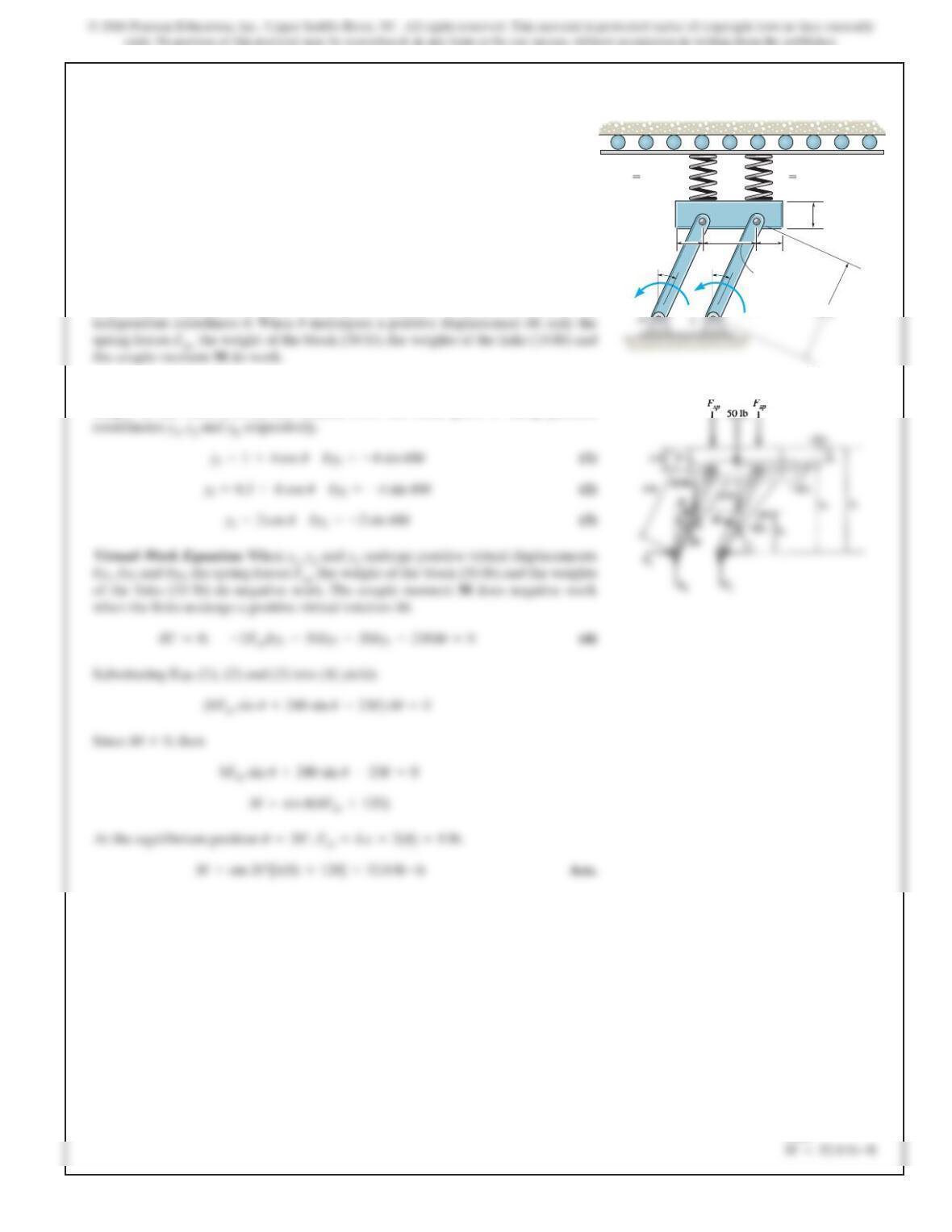
Whenthe50-lb uniform block compresses the
twoverticalsprings 4in. Iftheuniform linksAB and CD
eachweigh10 lb,determinethe magnitudeoftheapplied
couplemoments Mneededto maintain equilibrium when
u=20°.
u
=20°,
A
BD
C
MM
1ft
4ft
1ft
k2lb/in.k2lb/in.
1ft
2ft
uu
Ans:

1130
*11–8.
The bar is supported by the spring and smooth
collar that allows the spring to be always perpendicular to
the bar for any angle If the unstretched length of the
spring is determine the force Pneeded to hold the bar in
the equilibrium position Neglect the weight of the bar.u.
l0,
u.
SOLUTION
Ans:
1131
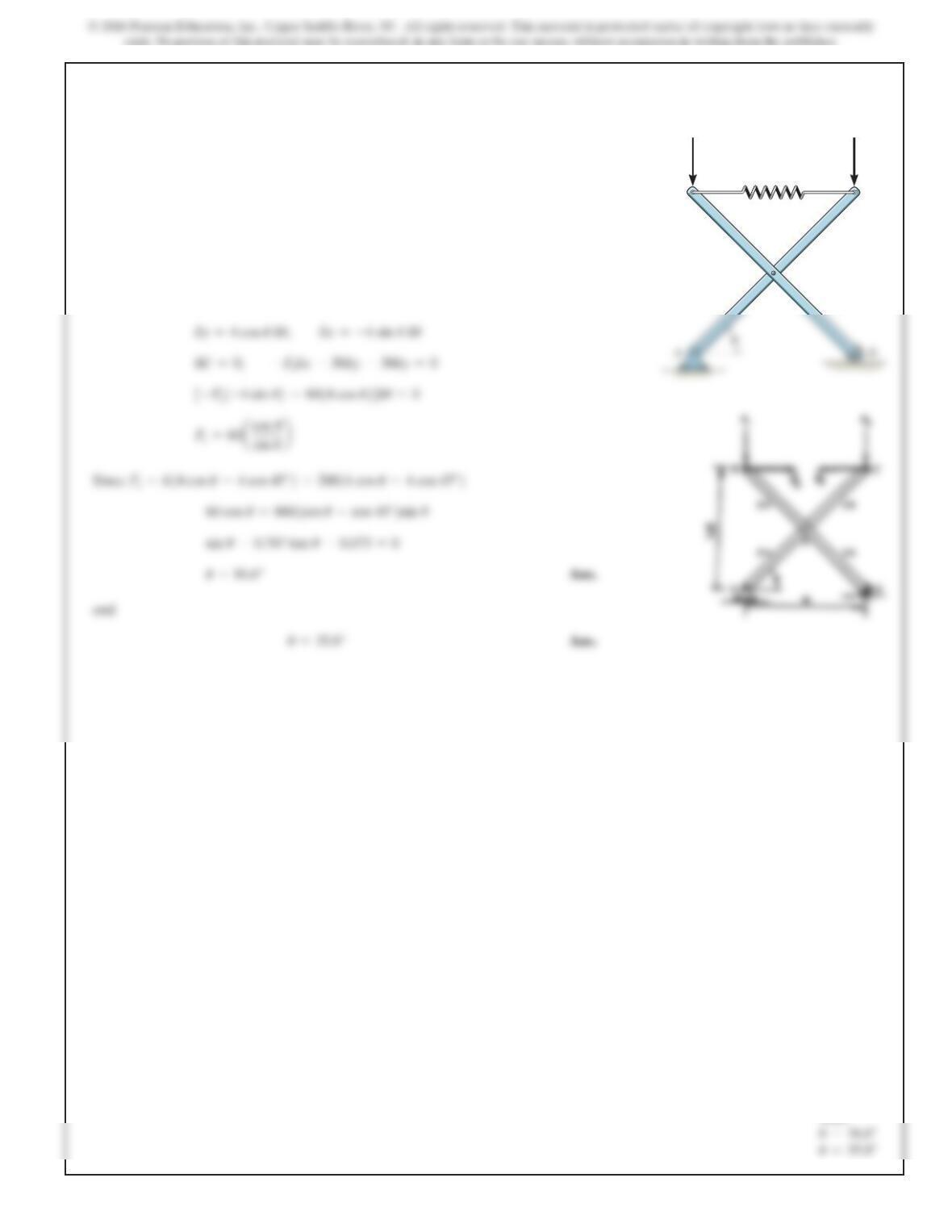
11–9.
SOLUTION
x=4 cos uy=4sin u,
The 4-ft members of the mechanism are pin-connected at
their centers.If vertical forces act at Cand
Eas shown,determine the angle for equilibrium. The
spring is unstretched when Neglect the weight of
the members.
u=45°.
u
P
1=P
2=30 lb
P1P2
k= 200 lb/ft
CE
B
2ft
2ft
2ft
2ft
Ans:
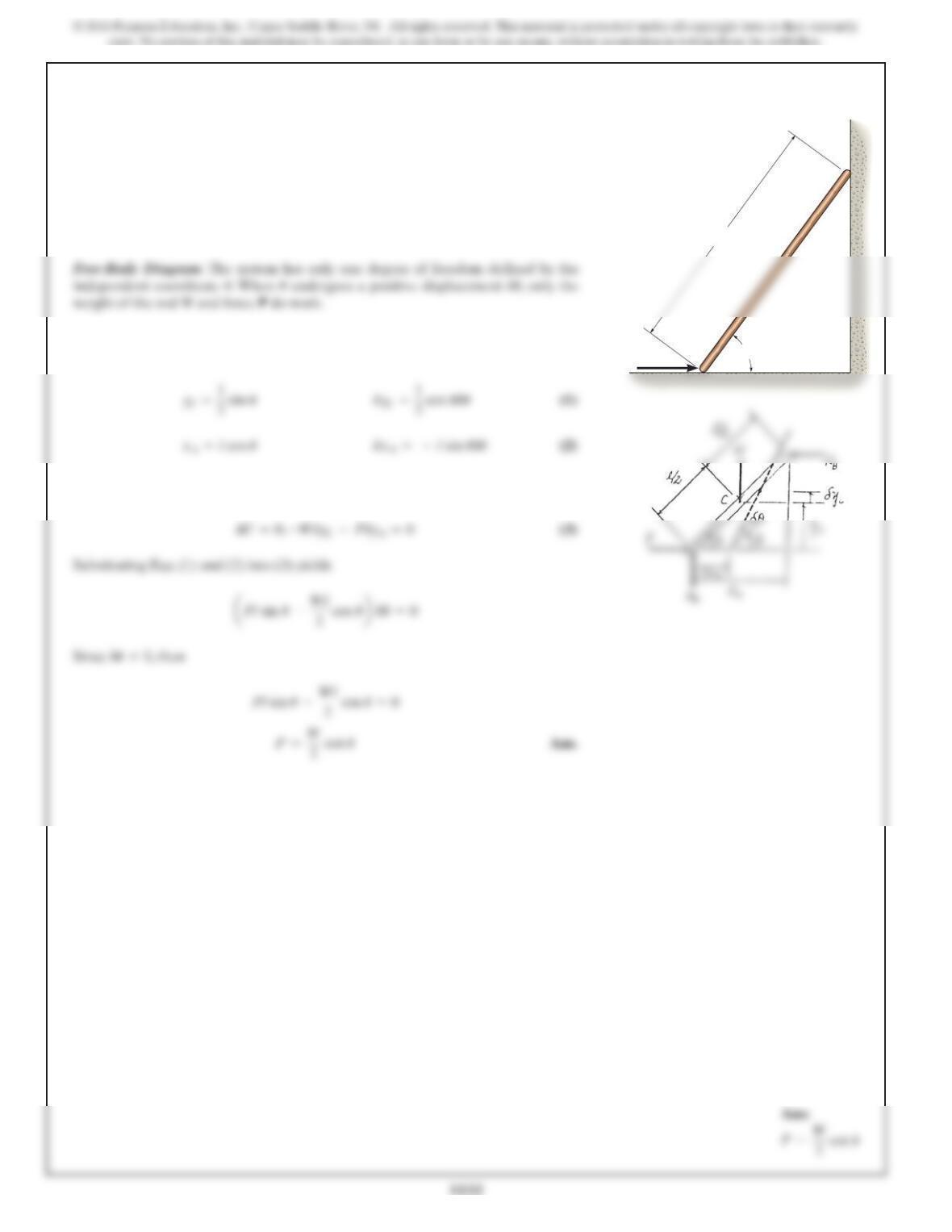
11–10.
The thin rod of weight Wrest against the smooth wall and
floor.Determine the magnitude of force Pneeded to hold it
in equilibrium for a given angle
SOLUTION
Free-Body Diagram: The system has only one degree of freedom defined by the
independent coordinate .When undergoes a positive displacement ,only the
weight of the rod Wand force Pdo work.
Virtual Displacements: The weight of the rod Wand force Pare located from the
fixed points Aand Busing position coordinates and ,respectively
Virtual-Work Equation:When points Cand Aundergo positive virtual displacements
and ,the weight of the rod Wand force Fdo negative work.
dxA
dyC
xA
yC
duuu
A
l
B
P
θ
u.

11–11.
If each of the three links of the mechanism have a mass of
4 kg, determine the angle
u
for equilibrium. The spring,
which always remains vertical, is unstretched when
u=0°.
SOLUTION
u
u
W
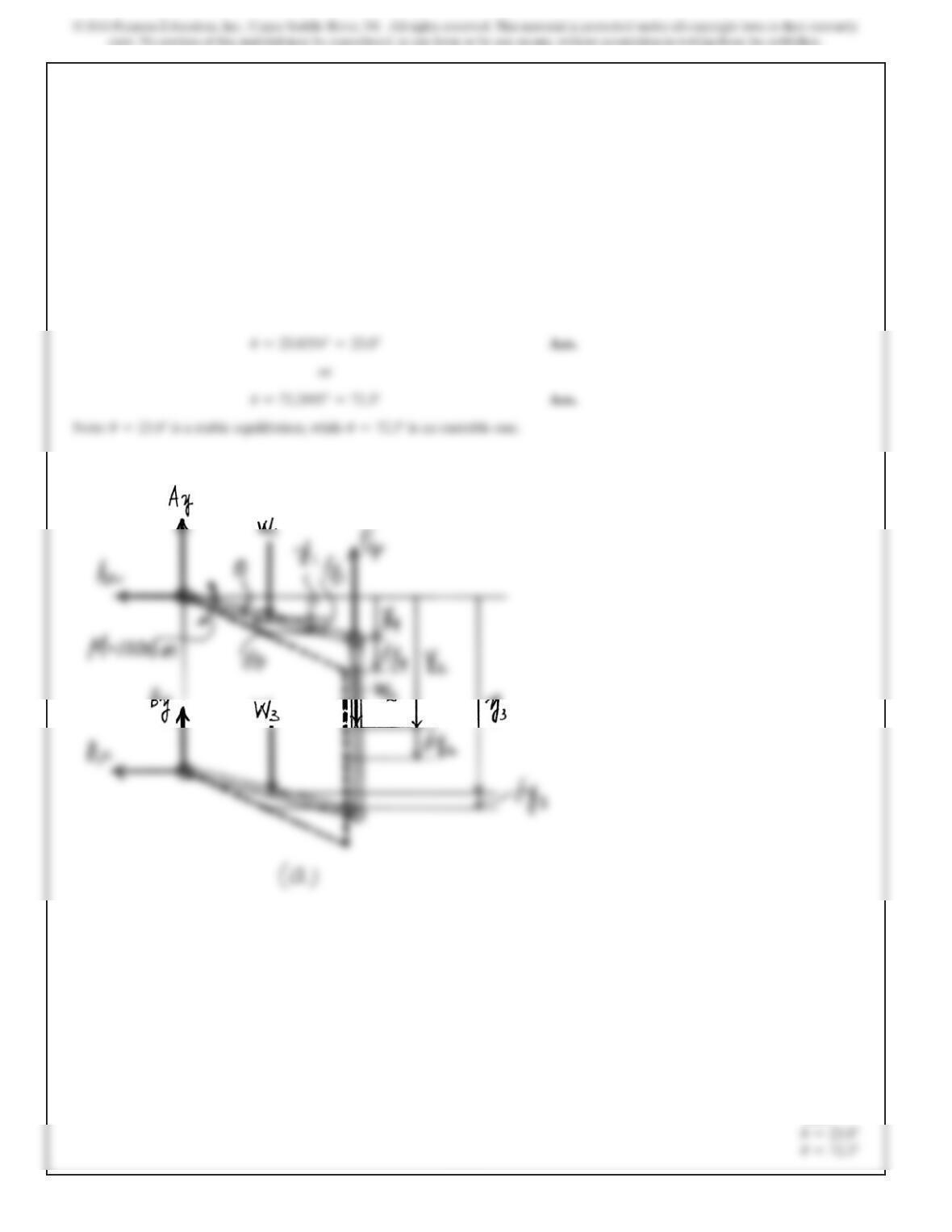
Virtual Displacement. The positions of the weights
W
1, W
2, W
3
and spring force
Fsp are measured from fixed point A using position coordinates
y1, y2, y3
and
y4
respectively
y1=0.1 sin
u
d
y1=0.1 cos
u
du (1)
y2=0.2 sin
y2=0.2 cos
y3=0.1 sin
y3=0.1 cos
y4=0.5 sin
u
d
y4=0.2 cos
u
du (4)
Virtual Work Equation. When all the weights undergo positive virtual displacement,
all of them do positive work. However, Fsp does negative work when its undergoes
W
sp
(0.4 W cos
u
–0.2 F
sp
cos
u
+M)
du
=0
Since d
≠0,
then
200 mm
200 mm
200 mm
C
D
A
M 30 N fi m
k 3 kN/m
B
u
u
0.4 W cos
1134
11–11. Continued
Solve numerically:
Note:
u=23.8°
is a stable equilibrium, while
u=72.3°
is an unstable one.
Ans:
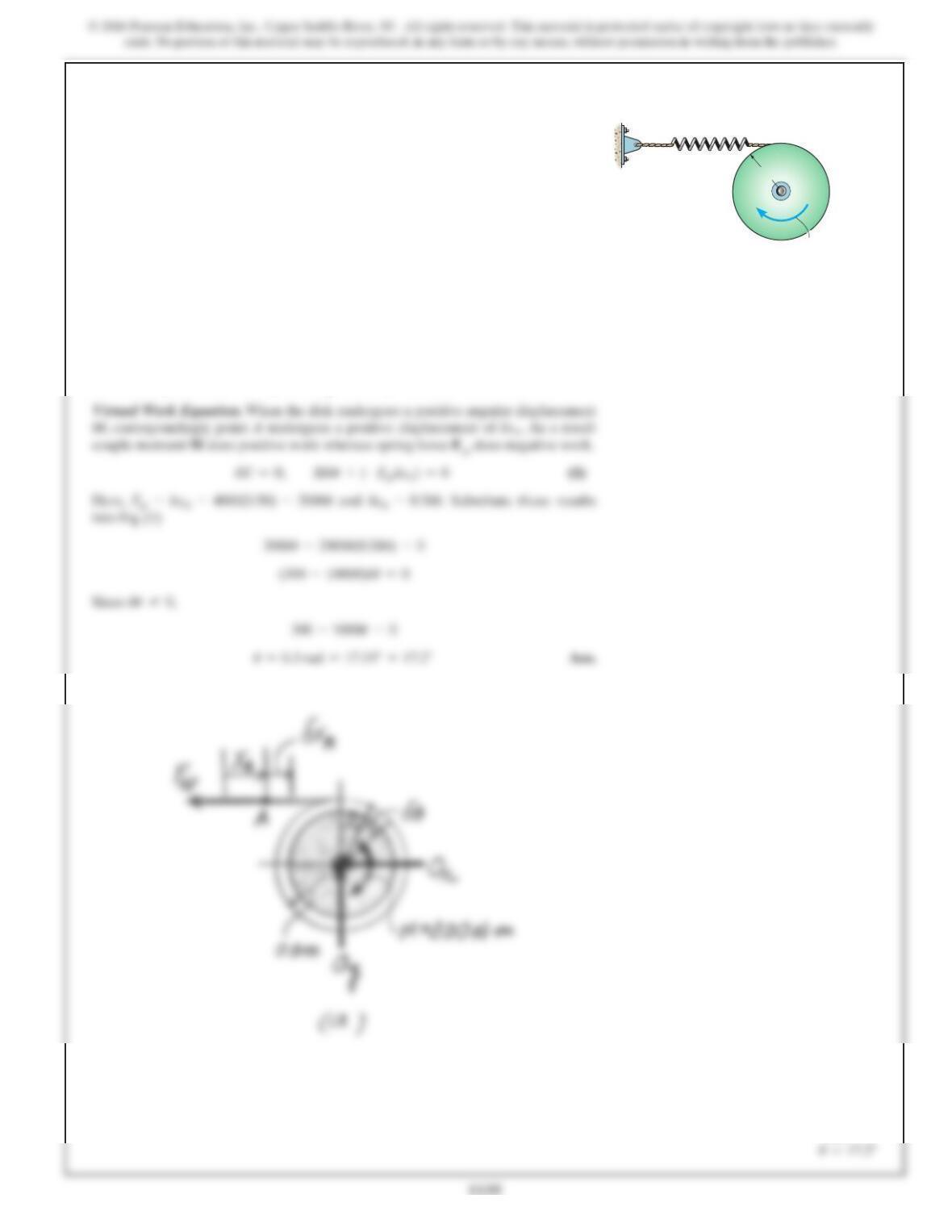
*11–12.
The disk is subjected to a couple moment M. Determine the
disk’s rotation
u
required for equilibrium. The end of the
spring wraps around the periphery of the disk as the disk
turns. The spring is originally unstretched.
SOLUTION
Free Body Diagram. The system has only one degree of freedom, defined by the
independent coordinate
u
. When
u
undergoes a positive angular displacement
du
as
shown in Fig. a, only the spring force Fsp and couple moment M do work.
du
k 4 kN/m
M 300 N fi m
0.5 m
Ans:
1136
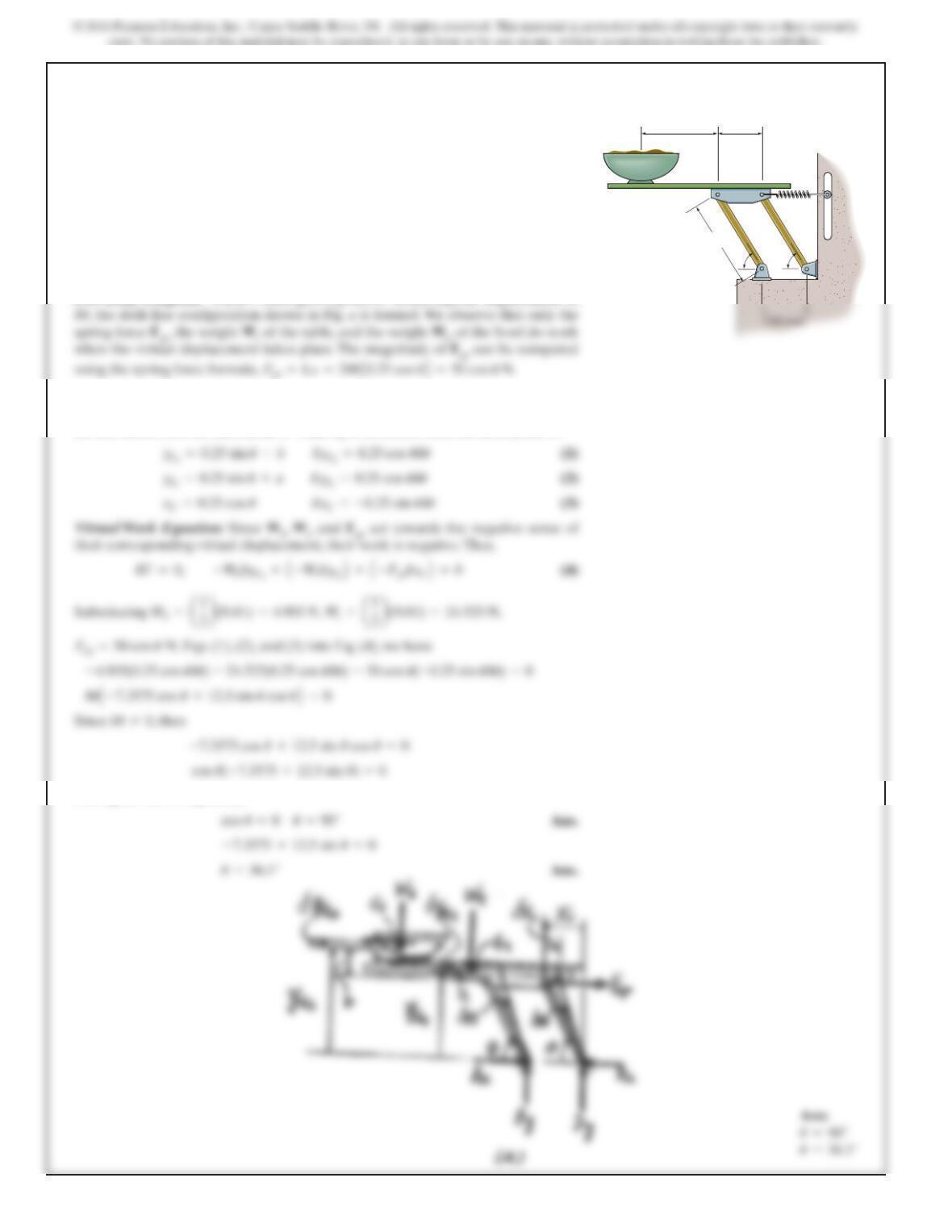
11–13.
A
5
-kg uniform serving table is supported on each side by
pairs of two identical links, and ,and springs .If
the bowl has a mass of , determine the angle where the
table is in equilibrium. The springs each have a stiffness of
and are unstretched when .Neglect
the mass of the links.
u=90°k=200 N>m
u1kg
CECDAB
SOLUTION
Free – Body Diagram: When undergoes a positive virtual angular displacement of
,the dash line configuration shown in Fig.aisformed. We observe that only the
Virtual Displacement: The position of points of application of Wb,Wt,and Fsp are
specified by the position coordinates and xC,respectively.Here,
are measured from the fixed point Bwhile xCis measured from the fixed point D.
(1)
cos u(–7.3575 +12.5 sin u)=0
–7.3575 cos u+12.5sin ucos u=0
yGb=0.25 sin u+bdyGb=0.25 cos udu
yGband yGt
yGb,yGt,
du
u
ACk
250 mm
250 mm 150 mm
150 mm
B
D
E
uu
1137
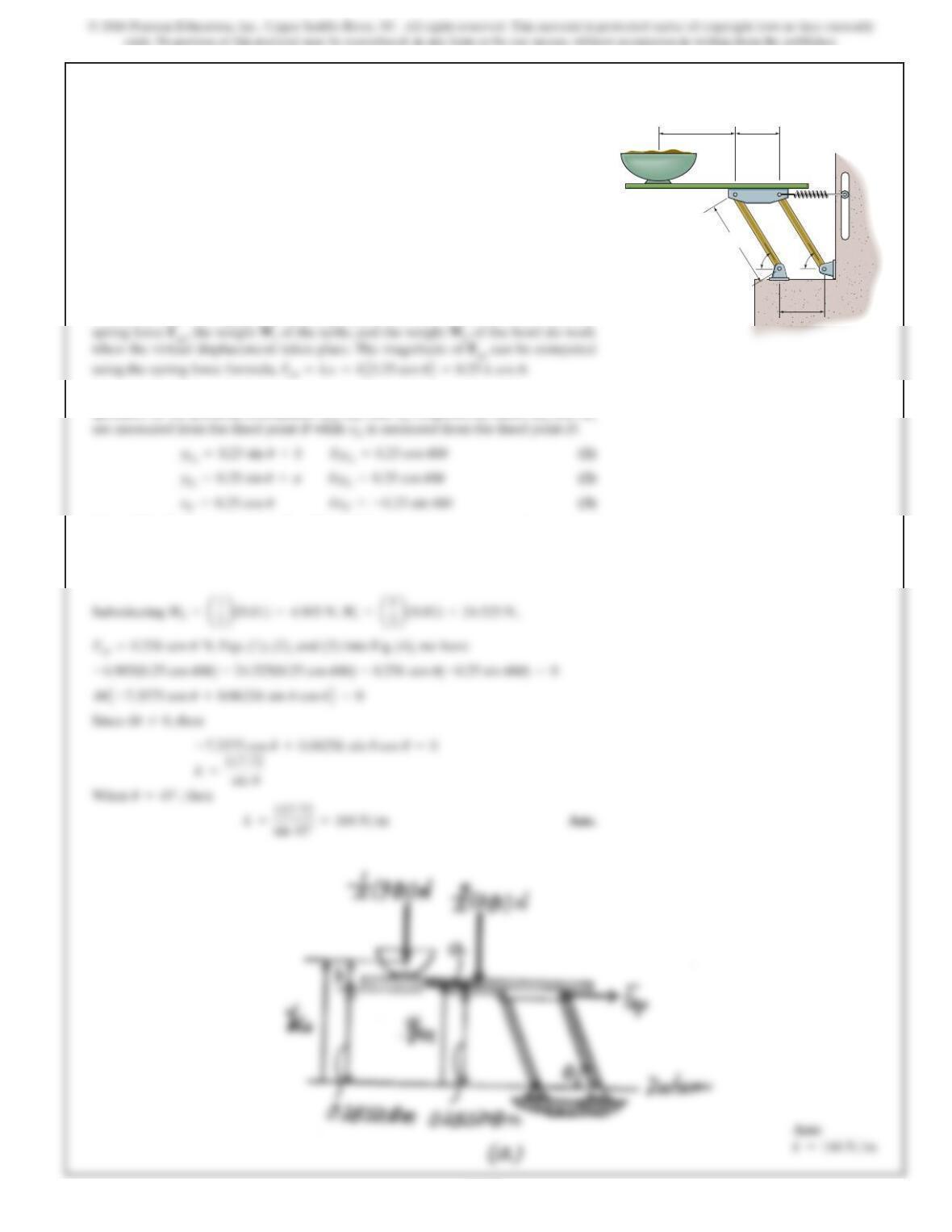
11–14.
SOLUTION
Free – Body Diagram: When undergoes a positive virtual angular displacement of
,the dash line configuration shown in Fig.aisformed. We observe that only the
spring force Fsp,the weight Wtofthe table, and the weight Wbofthe bowl do work
Virtual Work Equation: Since Wb,Wt,and Fsp act towards the negative sense of
their corresponding virtual displacement, their work is negative.Thus,
(4)
dU=0;–W
bdyGb+
A
–W
tdyGt
B
+
A
–F
spdxC
B
=0
du
u
A
5
-kg uniform serving table is supported on each side by
two pairs of identical links, and ,and springs .If
the bowl has a mass of and is in equilibrium when
,determine the stiffness of each spring.The springs
are unstretched when .Neglect the mass of the links.u=90°
ku=45°
1kg
CECDAB
ACk
250 mm
250 mm 150 mm
150 mm
B
D
E
uu
11–15.
SOLUTION
x=2acos u,dx=-2asin udu
Theservice windowat a fast-foodrestaurantconsists ofglass
doorsthat openand close automatically usingamotor which
supplies atorqueMto eachdoor. Thefarends, Aand B,
movealongthehorizontalguides.Ifafoodtraybecomes
stuckbetweenthedoorsasshown,determinethehorizontal
force thedoorsexertonthetrayat thepositionu.
MA
aa
aa
CB
D
M
uu
1139
*11–16.
The members of the mechanism are pin connected. If a
vertical force of 800 N acts at A, determine the angle
u
for
equilibrium. The spring is unstretched when
u=0°.
Neglect
the mass of the links.
1 m
1 m
800 N
1 m
k 6 kN/m
D
B
A
u
SOLUTION
Free Body Diagram. The system has only one degree of freedom, defined by the
independent coordinate
u
. When
u
undergoes a positive angular displacement
du
as
shown in Fig. a, only spring force Fsp and force P do work.
u=23.58°=23.6°
u=23.6°
1140
11–17.
When
u=30°
, the 25-kg uniform block compresses the two
horizontal springs 100 mm. Determine the magnitude of the
applied couple moments M needed to maintain equilibrium.
Take
k=3 kN>m
and neglect the mass of the links.
A
B
D
C
M
M
300 mm
200 mm
100 mm
100 mm
50 mm
k
k
u
u
SOLUTION
Free Body Diagram. The system has only one degree of freedom, defined by the
independent coordinate
u
. When
u
undergoes a positive angular displacement
du
as
shown in Fig. a, only spring force Fsp, the weight of the block W, and couple moment
M do work.
Virtual–Work Equation. When Fsp, W and M undergo their respective positive
virtual displacement, all of them do negative work. Thus
Since du
≠0,
then
11–18.
SOLUTION
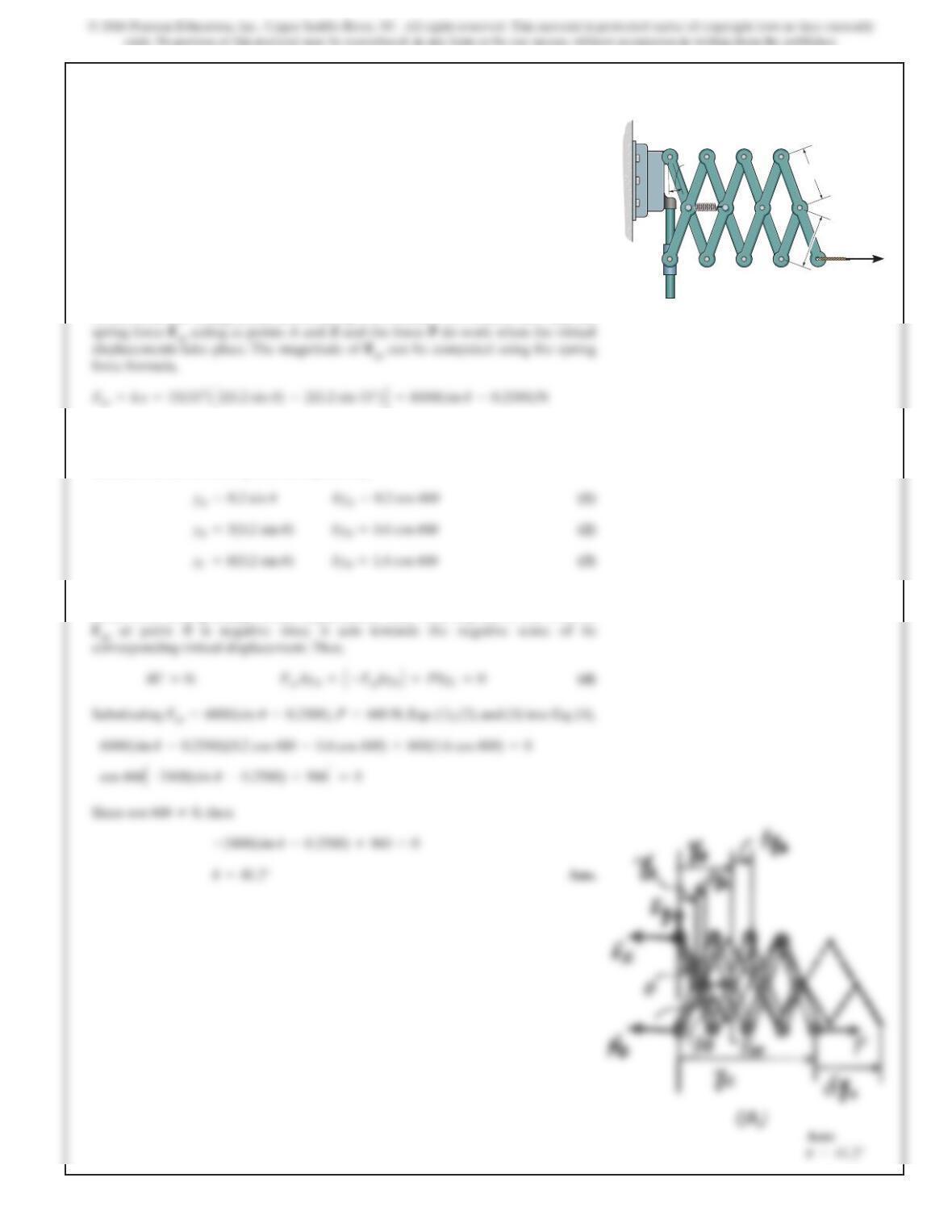
Free – Body Diagram: When undergoes a positive virtual angular displacement of
, the dash line configuration shown in Fig. ais a formed. We observe that only the
spring force Fsp acting at points Aand Band the force Pdo work when the virtual
displacements take place.The magnitude of Fsp can be computed using the spring
force formula,
Virtual Displacement: The position of points Aand Bat which Fsp acts and point C
at which force Pacts are specified by the position coordinates yA,yB, and yC,
measured from the fixed point E, respectively.
(1)
(2)
Since , then
Ans.u=41.2°
–2400(sin u–0.2588) +960 =0
cos udu Z0
yB=3(0.2 sin u)dyB=0.6 cos udu
yA=0.2 sin udyA=0.2 cos udu
du
u
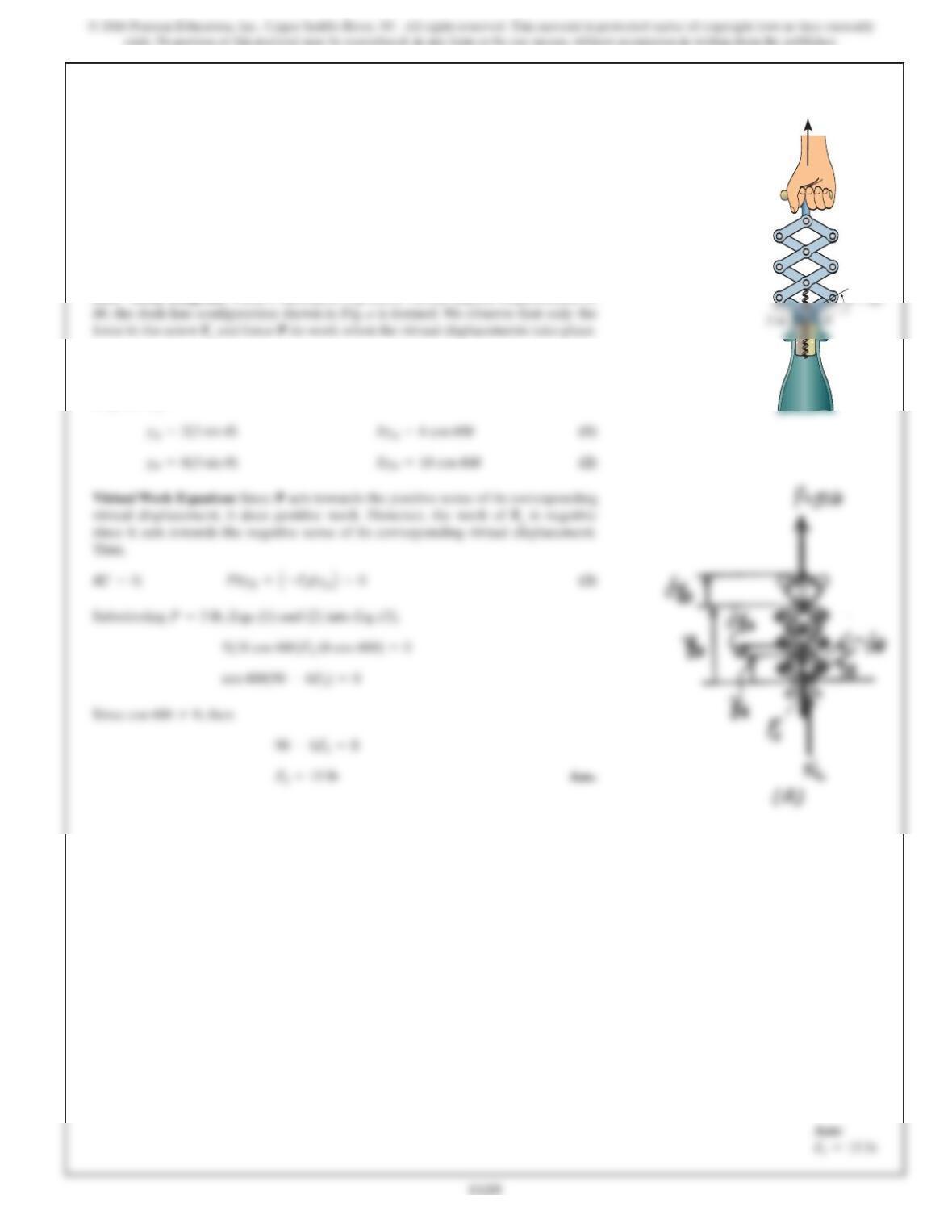
The “Nuremberg scissors” is subjected to a horizontal force
of . Determine the angle for equilibrium. The
spring has a stiffness of and is unstretched
when .u=15°
k=15 kN>m
uP=600 N
P
200 mm
200mm
A
C
D
E
B
k
u
Ans:
1142
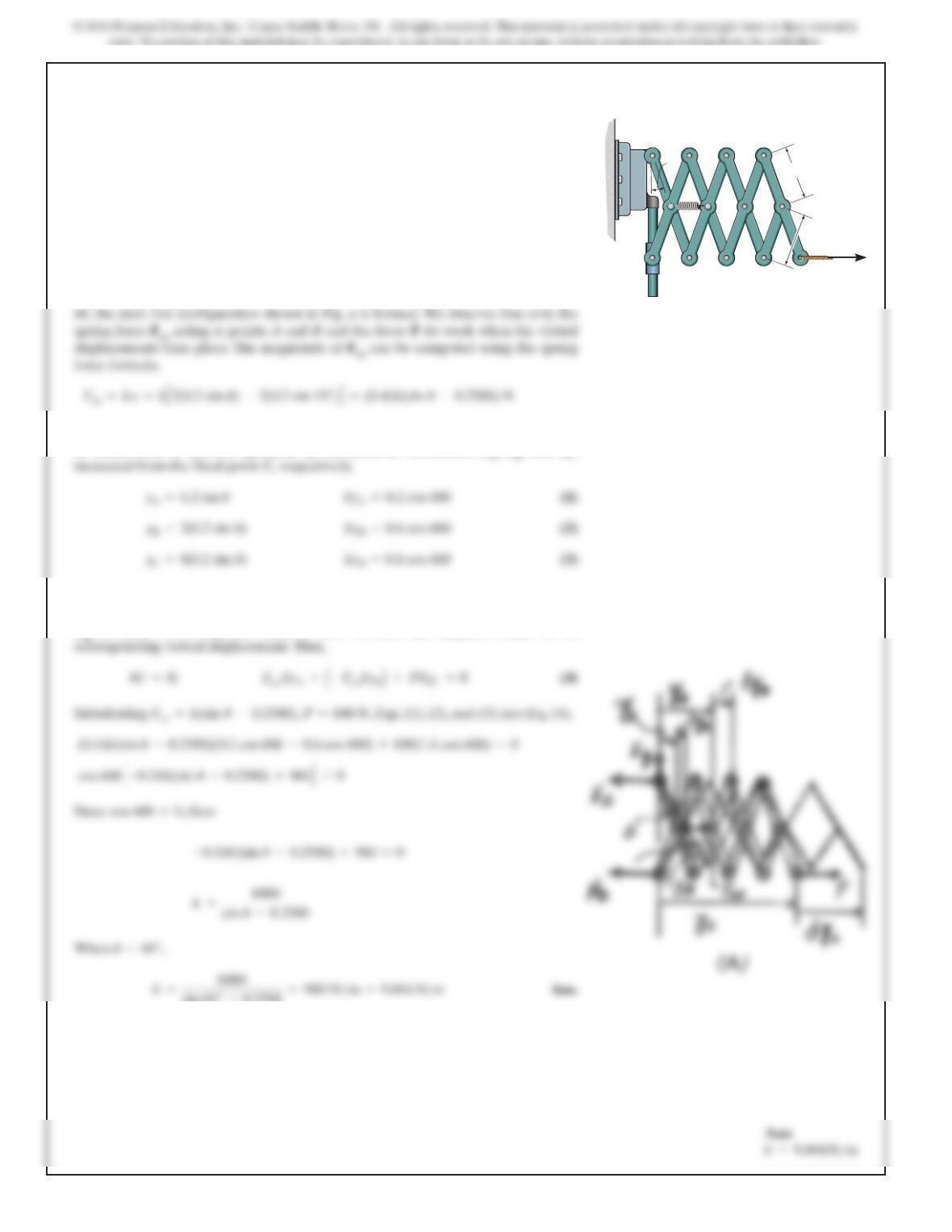
11–19.
The “Nuremberg scissors” is subjected to a horizontal force
of . Determine the stiffness kof the spring for
equilibrium when .The spring is unstretched when
.u=15°
u=60°
P=600 N
SOLUTION
Free – Body Diagram: When undergoes a positive virtual angular displacement of
, the dash line configuration shown in Fig. ais formed. We observe that only the
spring force Fsp acting at points Aand Band the force Pdo work when the virtual
displacements take place.The magnitude of Fsp can be computed using the spring
force formula.
du
u
P
200 mm
200mm
A
C
D
E
B
k
u
k=9.88
kN>m