
Protein Function
chapter 5
S-54
1. Relationship between Affinity and Dissociation Constant Protein A has a binding site for ligand
X with a K
d
of 10
⫺6
M
. Protein B has a binding site for ligand X with a K
d
of 10
⫺9
M
. Which protein has
a higher affinity for ligand X? Explain your reasoning. Convert the K
d
to K
a
for both proteins.
2. Negative Cooperativity Which of the following situations would produce a Hill plot with n
H
⬍1.0?
Explain your reasoning in each case.
(a) The protein has multiple subunits, each with a single ligand-binding site. Binding of ligand to one
site decreases the binding affinity of other sites for the ligand.
(b) The protein is a single polypeptide with two ligand-binding sites, each having a different affinity
for the ligand.
(c) The protein is a single polypeptide with a single ligand-binding site. As purified, the protein
preparation is heterogeneous, containing some protein molecules that are partially denatured
and thus have a lower binding affinity for the ligand.
3. Hemoglobin’s Affinity for Oxygen What is the effect of the following changes on the O
2
affinity of
hemoglobin? (a) A drop in the pH of blood plasma from 7.4 to 7.2. (b) A decrease in the partial pres-
sure of CO
2
in the lungs from 6 kPa (holding one’s breath) to 2 kPa (normal). (c) An increase in the
BPG level from 5 m
M
(normal altitudes) to 8 m
M
(high altitudes). (d) An increase in CO from 1.0 parts
per million (ppm) in a normal indoor atmosphere to 30 ppm in a home that has a malfunctioning or
leaking furnace.
c05ProteinFunction.qxd 12/6/12 4:18 PM Page S-54
Chapter 5 Protein Function S-55
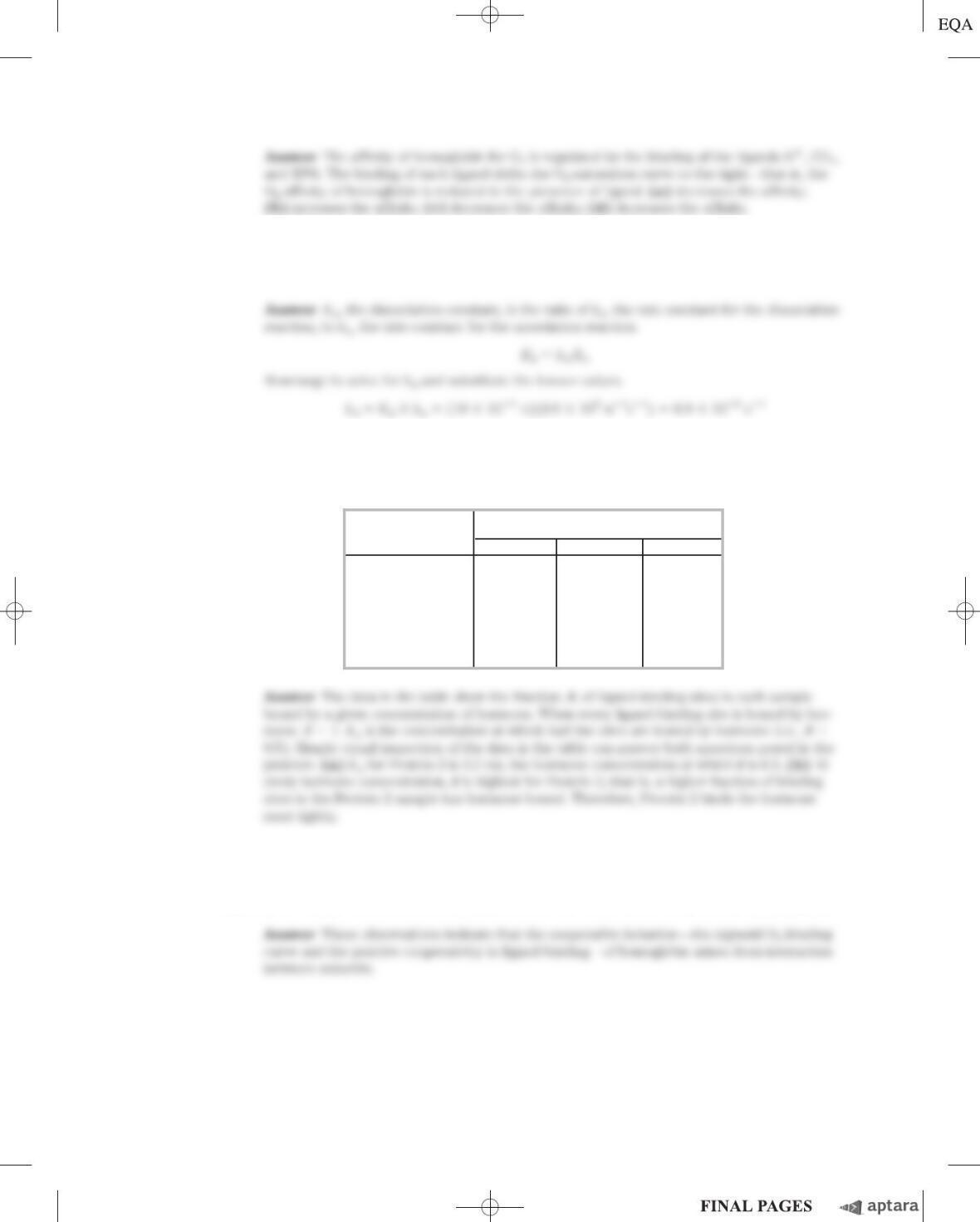
4. Reversible Ligand Binding I The protein calcineurin binds to the protein calmodulin with an associa-
tion rate of 8.9 ⫻10
3
M
⫺1
s
⫺1
and an overall dissociation constant, K
d
, of 10 n
M
. Calculate the dissocia-
tion rate, k
d
, including appropriate units.
5. Reversible Ligand Binding II Three membrane receptor proteins bind tightly to a hormone. Based
on the data in the table below, (a) what is the K
d
for hormone binding by protein 2? (Include appropri-
ate units.) (b) Which of these proteins binds most tightly to this hormone?
Hormone
concentration (nM) Protein 1 Protein 2 Protein 3
0.2 0.048 0.29 0.17
0.5 0.11 0.5 0.33
1 0.2 0.67 0.5
4 0.5 0.89 0.8
10 0.71 0.95 0.91
20 0.83 0.97 0.95
50 0.93 0.99 0.98
6. Cooperativity in Hemoglobin Under appropriate conditions, hemoglobin dissociates into its four
subunits. The isolated asubunit binds oxygen, but the O
2
-saturation curve is hyperbolic rather than sig-
moid. In addition, the binding of oxygen to the isolated asubunit is not affected by the presence of H
⫹
,
CO
2
, or BPG. What do these observations indicate about the source of the cooperativity in hemoglobin?
7. Comparison of Fetal and Maternal Hemoglobins Studies of oxygen transport in pregnant mammals
show that the O
2
-saturation curves of fetal and maternal blood are markedly different when measured
under the same conditions. Fetal erythrocytes contain a structural variant of hemoglobin, HbF, consisting
of two aand two gsubunits (a
2
g
2
), whereas maternal erythrocytes contain HbA (a
2
b
2
).
c05ProteinFunction.qxd 12/6/12 4:18 PM Page S-55
S-56 Chapter 5 Protein Function
(a) Which hemoglobin has a higher affinity for oxygen under physiological conditions, HbA or HbF?
Explain.
(b) What is the physiological significance of the different O
2
affinities?
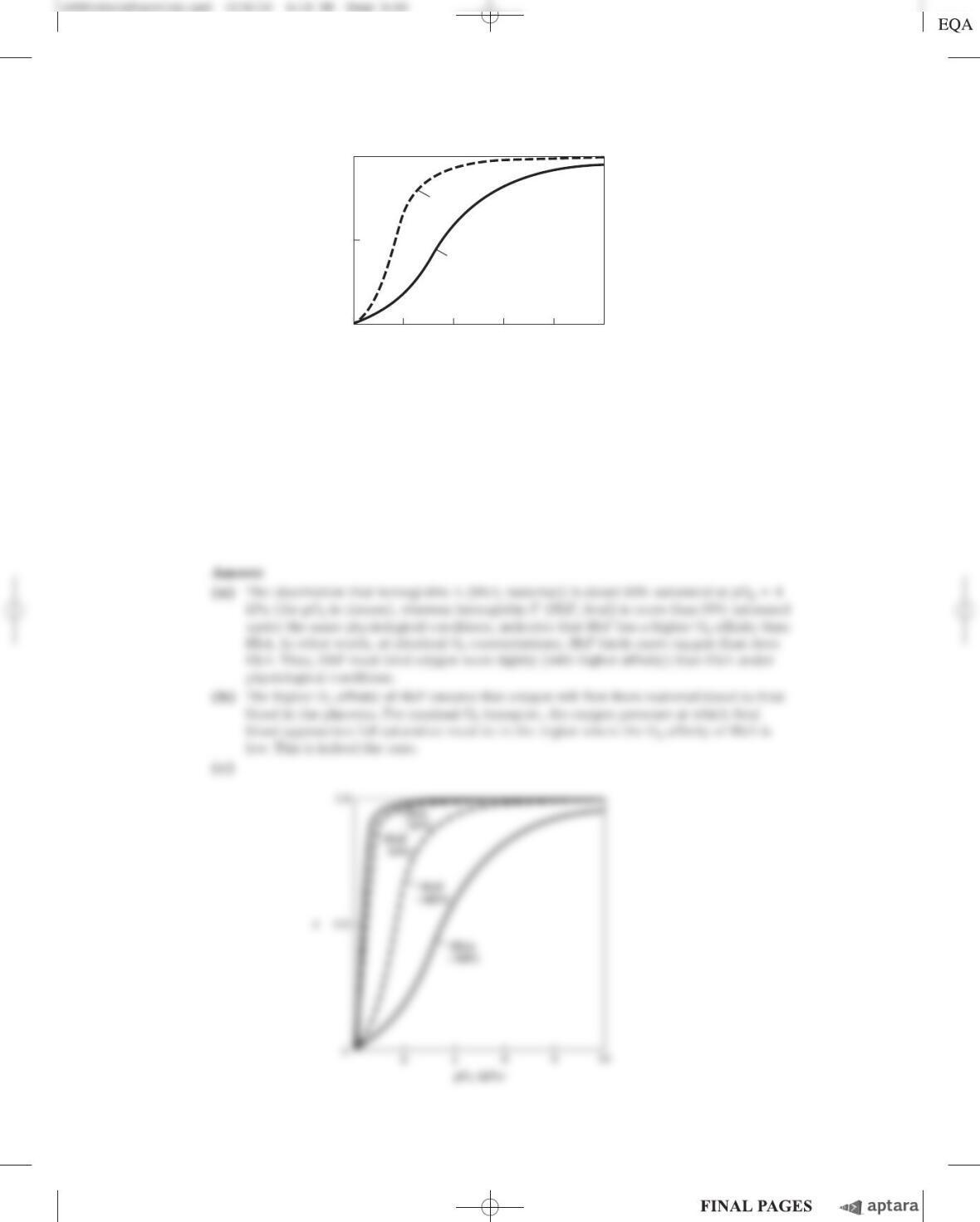
(c) When all the BPG is carefully removed from samples of HbA and HbF, the measured O
2
-saturation
curves (and consequently the O
2
affinities) are displaced to the left. However, HbA now has a
greater affinity for oxygen than does HbF. When BPG is reintroduced, the O
2
-saturation curves
return to normal, as shown in the graph. What is the effect of BPG on the O
2
affinity of hemoglobin?
How can the above information be used to explain the different O
2
affinities of fetal and maternal
hemoglobin?
1.0
0.5
0
v
42 6810
pO
2
(kPa)
HbF
⫹BPG
HbA
⫹BPG

Chapter 5 Protein Function S-57
8. Hemoglobin Variants There are almost 500 naturally occurring variants of hemoglobin. Most are the
result of a single amino acid substitution in a globin polypeptide chain. Some variants produce clinical
illness, though not all variants have deleterious effects. A brief sample follows:
HbS (sickle-cell Hb): substitutes a Val for a Glu on the surface
Hb Cowtown: eliminates an ion pair involved in T-state stabilization
Hb Memphis: substitutes one uncharged polar residue for another of similar size on the surface
Hb Bibba: substitutes a Pro for a Leu involved in an ahelix
Hb Milwaukee: substitutes a Glu for a Val
Hb Providence: substitutes an Asn for a Lys that normally projects into the central cavity of the tetramer
Hb Philly: substitutes a Phe for a Tyr, disrupting hydrogen bonding at the a
1
b
1
interface
Explain your choices for each of the following:
(a) The Hb variant least likely to cause pathological symptoms.
(b) The variant(s) most likely to show pI values different from that of HbA on an isoelectric fo-
cusing gel.
(c) The variant(s) most likely to show a decrease in BPG binding and an increase in the overall affin-
ity of the hemoglobin for oxygen.
9. Oxygen Binding and Hemoglobin Structure A team of biochemists uses genetic engineering to
modify the interface region between hemoglobin subunits. The resulting hemoglobin variants exist in
solution primarily as ␣ dimers (few, if any, ␣
2

2
tetramers form). Are these variants likely to bind
oxygen more weakly or more tightly? Explain your answer.
10. Reversible (but Tight) Binding to an Antibody An antibody binds to an antigen with a K
d
of
5 ⫻10
⫺8
M
. At what concentration of antigen will vbe (a) 0.2, (b) 0.5, (c) 0.6, (d) 0.8?
c05ProteinFunction.qxd 12/6/12 4:18 PM Page S-57

S-58 Chapter 5 Protein Function
11. Using Antibodies to Probe Structure-Function Relationships in Proteins A monoclonal antibody
binds to G-actin but not to F-actin. What does this tell you about the epitope recognized by the antibody?
12. The Immune System and Vaccines A host organism needs time, often days, to mount an immune
response against a new antigen, but memory cells permit a rapid response to pathogens previously
encountered. A vaccine to protect against a particular viral infection often consists of weakened or
killed virus or isolated proteins from a viral protein coat. When injected into a human patient, the vac-
cine generally does not cause an infection and illness, but it effectively “teaches” the immune system
what the viral particles look like, stimulating the production of memory cells. On subsequent infection,
these cells can bind to the virus and trigger a rapid immune response. Some pathogens, including HIV,
have developed mechanisms to evade the immune system, making it difficult or impossible to develop
effective vaccines against them. What strategy could a pathogen use to evade the immune system?
Assume that a host’s antibodies and/or T-cell receptors are available to bind to any structure that
might appear on the surface of a pathogen and that, once bound, the pathogen is destroyed.
13. How We Become a “Stiff” When a vertebrate dies, its muscles stiffen as they are deprived of ATP,
a state called rigor mortis. Explain the molecular basis of the rigor state.
14. Sarcomeres from Another Point of View The symmetry of thick and thin filaments in a sarcomere
is such that six thin filaments ordinarily surround each thick filament in a hexagonal array. Draw a
cross section (transverse cut) of a myofibril at the following points: (a) at the M line; (b) through the
I band; (c) through the dense region of the A band; (d) through the less dense region of the A band,
adjacent to the M line (see Fig. 5–29b, c).
Answer

Using the Web
15. Lysozyme and Antibodies To fully appreciate how proteins function in a cell, it is helpful to have a
three-dimensional view of how proteins interact with other cellular components. Fortunately, this is
possible using Web-based protein databases and three-dimensional molecular viewing utilities such as
Jmol, a free and user-friendly molecular viewer that is compatible with most browsers and operating
systems.
In this exercise you will examine the interactions between the enzyme lysozyme (Chapter 4) and
the Fab portion of the anti-lysozyme antibody. Use the PDB identifier 1FDL to explore the structure of
the IgG1 Fab fragment–lysozyme complex (antibody-antigen complex). To answer the following ques-
tions, use the information on the Structure Summary page at the Protein Data Bank (www.rcsb.org),
and view the structure using Jmol or a similar viewer.
(a) Which chains in the three-dimensional model correspond to the antibody fragment and which
correspond to the antigen, lysozyme?
(b) What type of secondary structure predominates in this Fab fragment?
(c) How many amino acid residues are in the heavy and light chains of the Fab fragment? In
lysozyme? Estimate the percentage of the lysozyme that interacts with the antigen-binding site of
the antibody fragment.
(d) Identify the specific amino acid residues in lysozyme and in the variable regions of the Fab heavy
and light chains that are situated at the antigen-antibody interface. Are the residues contiguous in
the primary sequence of the polypeptide chains?
Answer
16. Exploring Reversible Interactions of Proteins and Ligands with Living Graphs Use the
living graphs for Equations 5–8, 5–11, 5–14, and 5–16 to work through the following exercises.
Chapter 5 Protein Function S-59
c05ProteinFunction.qxd 12/6/12 4:18 PM Page S-59

S-60 Chapter 5 Protein Function
(a) Reversible binding of a ligand to a simple protein, without cooperativity. For Equation 5–8, set up
a plot of vversus [L] (vertical and horizontal axes, respectively). Examine the plots generated
when K
d
is set at 5, 10, 20, and 100 m
M
. Higher affinity of the protein for the ligand means more
binding at lower ligand concentrations. Suppose that four different proteins exhibit these four
different K
d
values for ligand L. Which protein would have the highest affinity for L?
Examine the plot generated when K
d
⫽10 m
M
. How much does vincrease when [L] increases
from 0.2 to 0.4 m
M
? How much does vincrease when [L] increases from 40 to 80 m
M
?
You can do the same exercise for Equation 5–11. Convert [L] to pO
2
and K
d
to P
50
. Examine
the curves generated when P
50
is set at 0.5, 1, 2, and 10 kPa. For the curve generated when
P
50
⫽1 kPa, how much does vchange when the pO
2
increases from 0.02 to 0.04 kPa? From 4 to
8 kPa?
(b) Cooperative binding of a ligand to a multisubunit protein. Using Equation 5–14, generate a bind-
ing curve for a protein and ligand with K
d
⫽10 m
M
and n⫽3. Note the altered definition of K
d
in
Equation 5–16. On the same plot, add a curve for a protein with K
d
⫽20 m
M
and n⫽3. Now see
how both curves change when you change to n⫽4. Generate Hill plots (Eqn 5–16) for each of
these cases. For K
d
⫽10 m
M
and n⫽3, what is vwhen [L] ⫽20 m
M
?
(c) Explore these equations further by varying all the parameters used above.
Answer
Data Analysis Problem
17. Protein Function During the 1980s, the structures of actin and myosin were known only at the resolu-
tion shown in Figure 5–28a, b. Although researchers knew that the S1 portion of myosin binds to actin
and hydrolyzes ATP, there was a substantial debate about where in the myosin molecule the contractile
force was generated. At the time, two competing models were proposed for the mechanism of force gen-
eration in myosin.
In the “hinge” model, S1 bound to actin, but the pulling force was generated by contraction of the
“hinge region” in the myosin tail. The hinge region is in the heavy meromyosin portion of the myosin
molecule, near where trypsin cleaves off light meromyosin (see Fig. 5–27b). This is roughly the point
labeled “Two supercoiled ␣helices” in Figure 5–27a. In the “S1” model, the pulling force was gener-
ated in the S1 “head” itself and the tail was just for structural support.
Many experiments had been performed but provided no conclusive evidence. In 1987, James Spu-
dich and his colleagues at Stanford University published a study that, although not conclusive, went a
long way toward resolving this controversy.
Recombinant DNA techniques were not sufficiently developed to address this issue in vivo, so Spudich
and colleagues used an interesting in vitro motility assay. The alga Nitella has extremely long cells, often sev-
eral centimeters in length and about 1 mm in diameter. These cells have actin fibers that run along their long
axes, and the cells can be cut open along their length to expose the actin fibers. Spudich and his group had
observed that plastic beads coated with myosin would “walk” along these fibers in the presence of ATP, just as
myosin would do in contracting muscle.
(e) Which model (“S1” or “hinge”) is consistent with these results? Explain your reasoning.
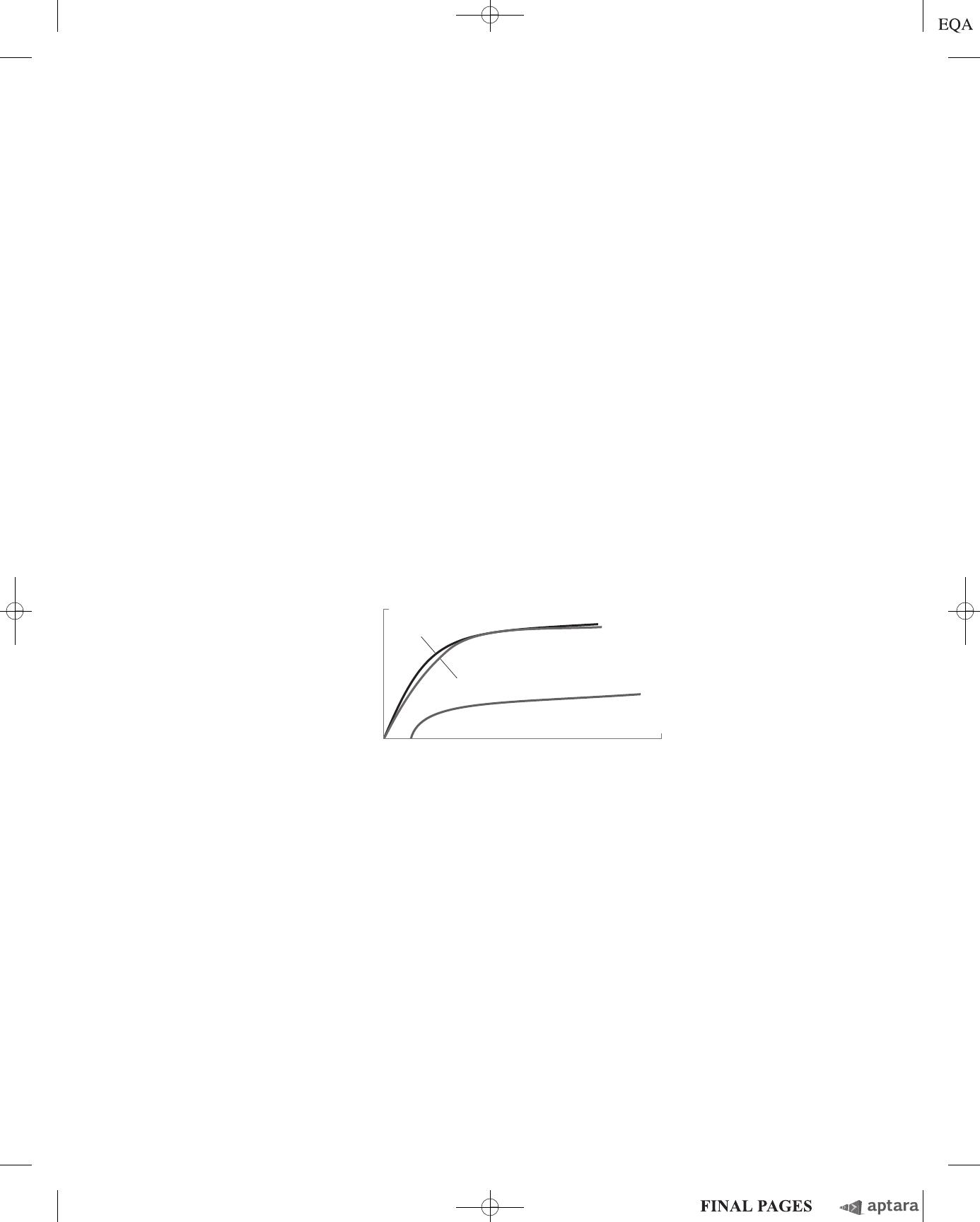
(f) Provide a plausible explanation for why the speed of the beads increased with increasing myosin
density.
(g) Provide a plausible explanation for why the speed of the beads reached a plateau at high myosin
density.
The more extensive trypsin digestion required to produce SHMM had a side effect: another spe-
cific cleavage of the myosin polypeptide backbone in addition to the cleavage in the tail. This second
cleavage was in the S1 head.
(h) Based on this information, why is it surprising that SHMM was still capable of moving beads
along actin fibers?
Chapter 5 Protein Function S-61
Density of myosin or myosin fragment bound to beads
Myosin
HMM
SHMM
0
2
0
Speed of beads ( m/s)
µ
For these experiments, they used a more well-defined method for attaching the myosin to the
beads. The “beads” were clumps of killed bacterial (Staphylococcus aureus) cells. These cells have a
protein on their surface that binds to the Fc region of antibody molecules (Fig. 5–21a). The antibod-
ies, in turn, bind to several (unknown) places along the tail of the myosin molecule. When bead-
antibody-myosin complexes were prepared with intact myosin molecules, they would move along
Nitella actin fibers in the presence of ATP.
(a) Sketch a diagram showing what a bead-antibody-myosin complex might look like at the molecu-
lar level.
(b) Why was ATP required for the beads to move along the actin fibers?
(c) Spudich and coworkers used antibodies that bound to the myosin tail. Why would this experi-
ment have failed if they had used an antibody that bound to the part of S1 that normally binds to
actin? Why would this experiment have failed if they had used an antibody that bound to actin?
To help focus in on the part of myosin responsible for force production, Spudich and his col-
leagues used trypsin to produce two partial myosin molecules (see Fig. 5–27b): (1) heavy meromyosin
(HMM), made by briefly digesting myosin with trypsin; HMM consists of S1 and the part of the tail that
includes the hinge; and (2) short heavy meromyosin (SHMM), made from a more extensive digestion
of HMM with trypsin; SHMM consists of S1 and a shorter part of the tail that does not include the
hinge. Brief digestion of myosin with trypsin produces HMM and light meromyosin, by cleavage of a
single specific peptide bond in the myosin molecule.
(d) Why might trypsin attack this peptide bond first rather than other peptide bonds in myosin?
Spudich and colleagues prepared bead-antibody-myosin complexes with varying amounts of
myosin, HMM, and SHMM, and measured their speeds along Nitella actin fibers in the presence of
ATP. The graph below sketches their results.
c05ProteinFunction.qxd 12/6/12 4:18 PM Page S-61

S-62 Chapter 5 Protein Function
(i) As it turns out, the tertiary structure of the S1 head remains intact in SHMM. Provide a plausible
explanation of how the protein remains intact and functional even though the polypeptide back-
bone has been cleaved and is no longer continuous.
Answer