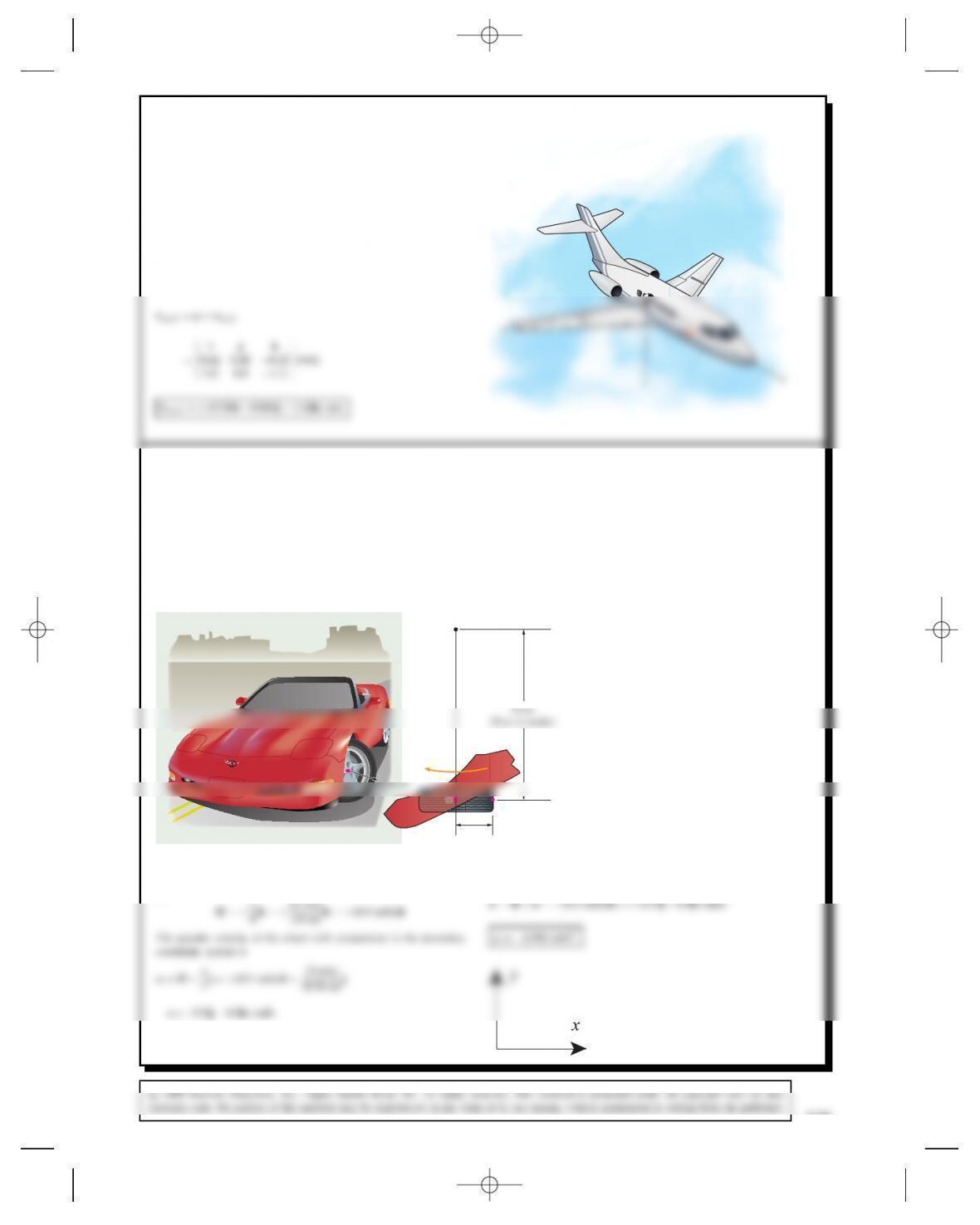
Problem 20.1 The airplane’s angular velocity relative
to an earth-fixed reference frame, expressed in terms of
the body-fixed coordinate system shown, is ω=0.62i+
0.45j−0.23k(rad/s). The coordinates of point Aof the
airplane are (3.6, 0.8, −1.2) m. What is the velocity of
point Arelative to the velocity of the airplane’s center
of mass?
Solution:
Problem 20.2 In Active Example 20.1, suppose that
the center of the tire moves at a constant speed of 5 m/s
as the car turns. (As a result, when the angular veloc-
ity of the tire relative to an earth-fixed reference frame
is expressed in terms of components in the secondary
reference frame,ω=ωxi+ωyj+ωzk, the components
ωx,ωy, and ωzare constants.) What is the angular accel-
eration αof the tire relative to an earth-fixed reference
frame?
To
p
view
0.36 m
P
A
B
Solution: The angular velocity of the secondary coordinate system
is
The angular acceleration is then
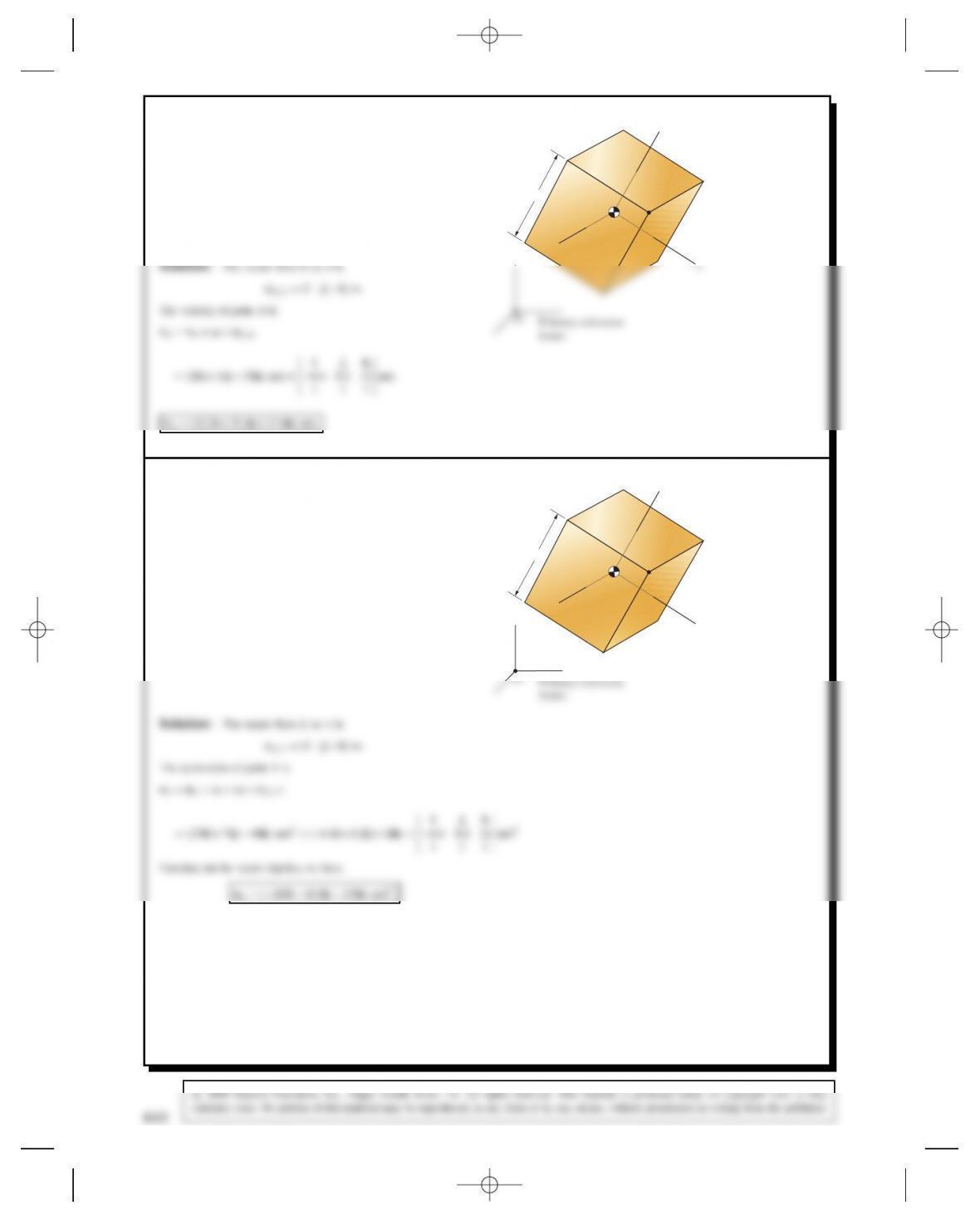
Problem 20.3 The angular velocity of the cube relative
to the primary reference frame, expressed in terms of
the body-fixed coordinate system shown is ω=−6.4i+
8.2j+12k(rad/s). The velocity of the center of mass G
of the cube relative to the primary reference frame at
the instant shown is vG=26i+14j+32k(m/s). What
is the velocity of point Aof the cube relative to the
primary reference frame at the instant shown?
2 m
A
G
y
z
rG/A =(i+j+k)m.
The velocity of point Ais
Problem 20.4 The coordinate system shown is fixed
with respect to the cube. The angular velocity of the cube
relative to the primary reference frame, ω=−6.4i+
8.2j+12k(rad/s), is constant. The acceleration of the
center of mass Gof the cube relative to the primary ref-
erence frame at the instant shown is aG=136i+76j−
48k(m/s2). What is the acceleration of point Aof the
cube relative to the primary reference frame at the instant
shown?
2 m
x
A
G
y
z
640
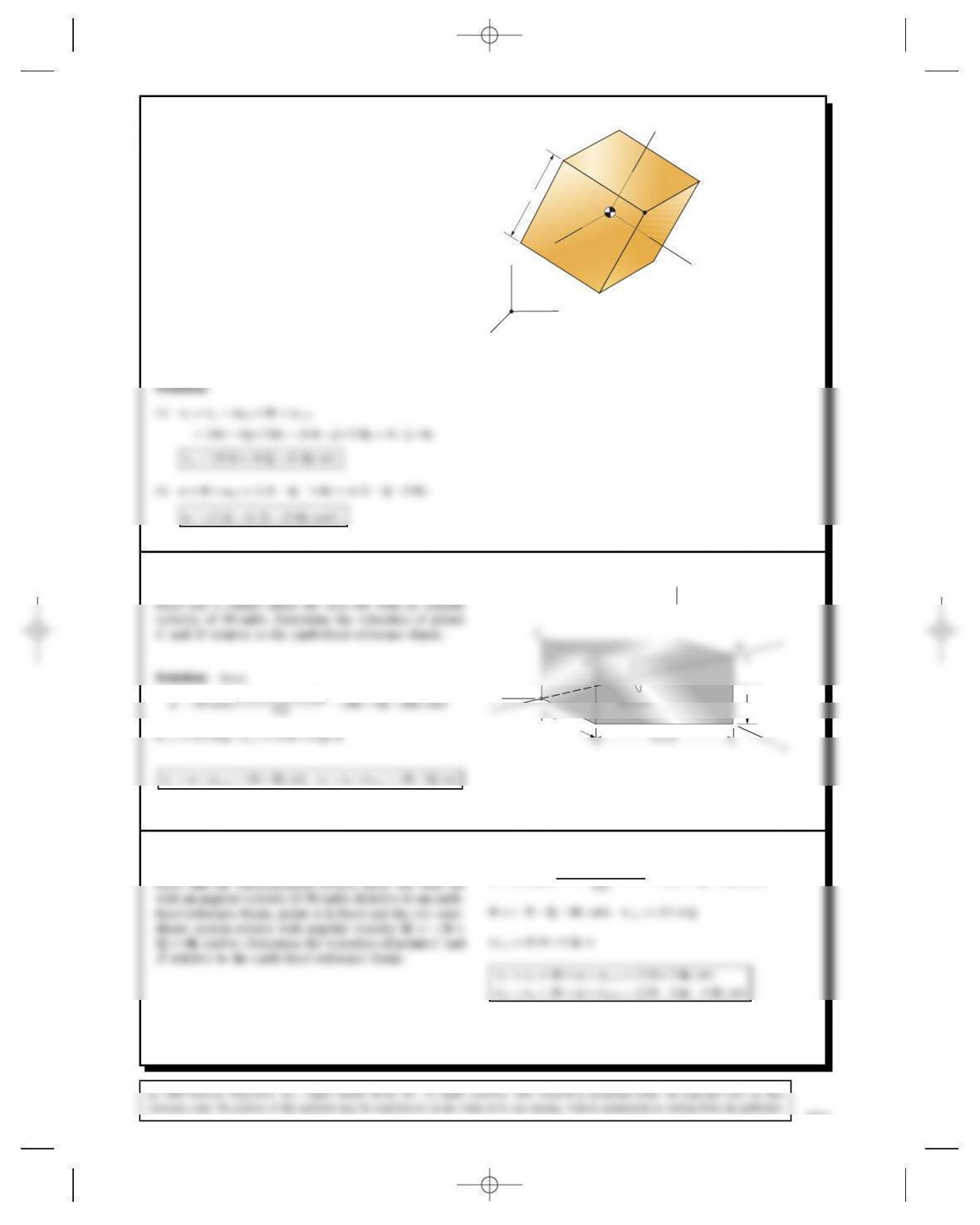
Problem 20.5 The origin of the secondary coordinate
system shown is fixed to the center of mass Gof the
cube. The velocity of the center of mass Gof the cube
relative to the primary reference frame at the instant
shown is vG=26i+14j+32k(m/s). The cube is rotat-
ing relative to the secondary coordinate system with
angular velocity ωrel =6.2i−5j+8.8k(rad/s). The sec-
ondary coordinate system is rotating relative to the pri-
mary reference frame with angular velocity =2.2i+
4j−3.6k(rad/s).
(a) What is the velocity of point Aof the cube rela-
tive to the primary reference frame at the instant
shown?
(b) If the components of the vectors ωrel and are
constant, what is the cube’s angular acceleration
relative to the primary reference frame?
2 m
x
A
G
O
y
z
Primary reference
frame
Problem 20.6 Relative to an earth-fixed reference
frame, points Aand Bof the rigid parallelepiped are
y
Problem 20.7 Relative to the xyz coordinate system
shown, points Aand Bof the rigid parallelepiped are
Solution: Given
ω=(30 rad/s)(0.4i+0.2j−0.4k)
Problem 20.8 Relative to an earth-fixed reference
frame, the vertical shaft rotates about its axis with angu-
lar velocity ω0=4 rad/s. The secondary xyz coordinate
system is fixed with respect to the shaft and its origin is
stationary. Relative to the secondary coordinate system,
y
Problem 20.9 Relative to an earth-fixed reference
frame, the vertical shaft rotates about its axis with angu-
lar velocity ω0=4 rad/s. The secondary xyz coordinate
system is fixed with respect to the shaft and its origin is
stationary. Relative to the secondary coordinate system,
the disk (radius =8 in) rotates with constant angular
velocity ωd=6 rad/s.
(a) What is the angular acceleration of the disk relative
to the earth-fixed reference frame?
vd
A
y
45⬚
642
Problem 20.10 The radius of the disk is R=2 ft. It
is perpendicular to the horizontal part of the shaft and
rotates relative to it with constant angular velocity ωd=
(b) Determine the disk’s angular acceleration vector α
relative to the earth-fixed reference frame.
v0
x
y
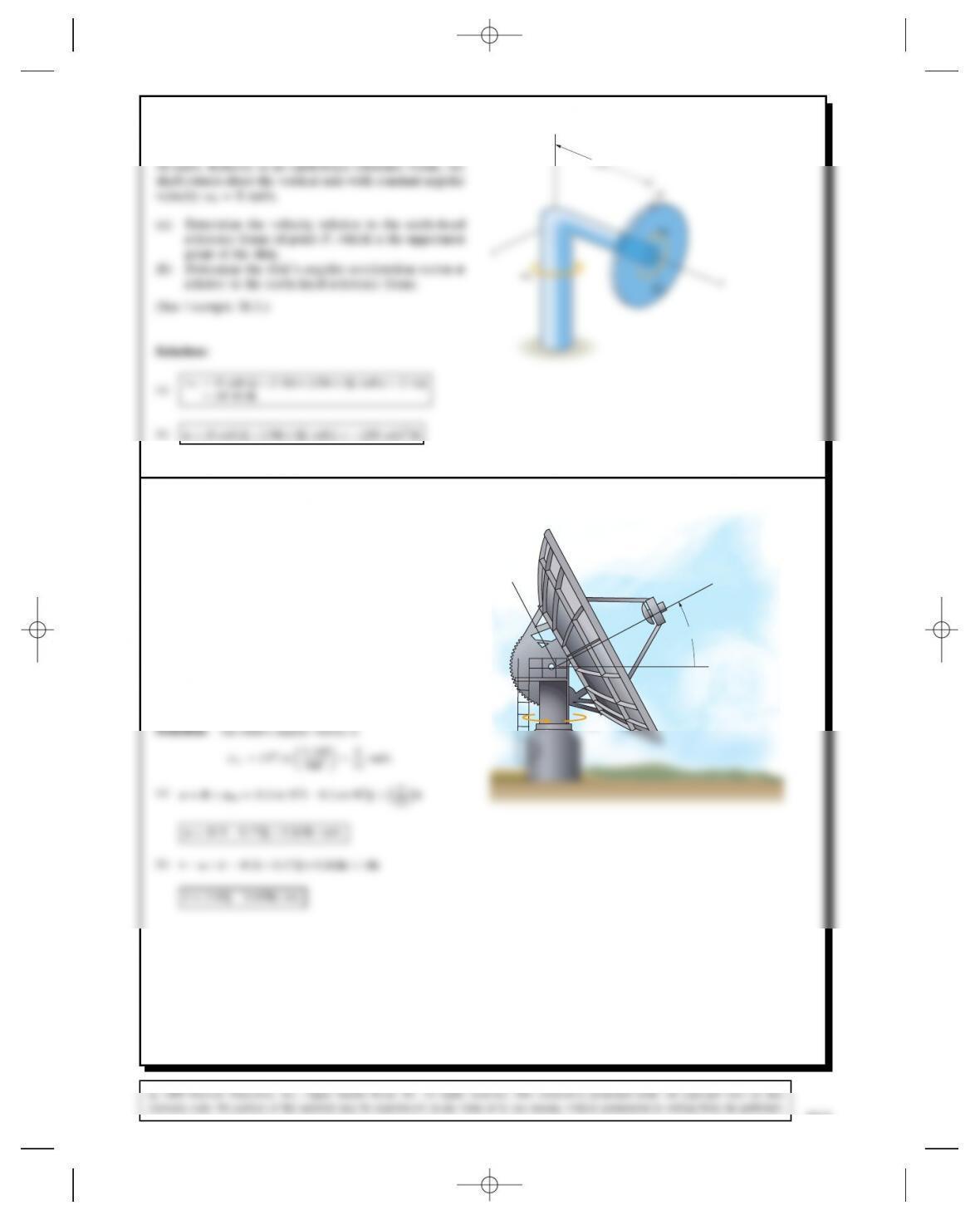
Problem 20.11 The vertical shaft supporting the disk
antenna is rotating with a constant angular velocity ω0=
0.2 rad/s. The angle θfrom the horizontal to the antenna’s
axis is 30◦at the instant shown and is increasing at a
constant rate of 15◦per second. The secondary xyz coor-
dinate system shown is fixed with respect to the dish.
(a) What is the dish’s angular velocity relative to an
earth-fixed reference frame?
(b) Determine the velocity of the point of the antenna
with coordinates (4,0,0) m relative to an earth-fixed
reference frame.
x
y
v0
u
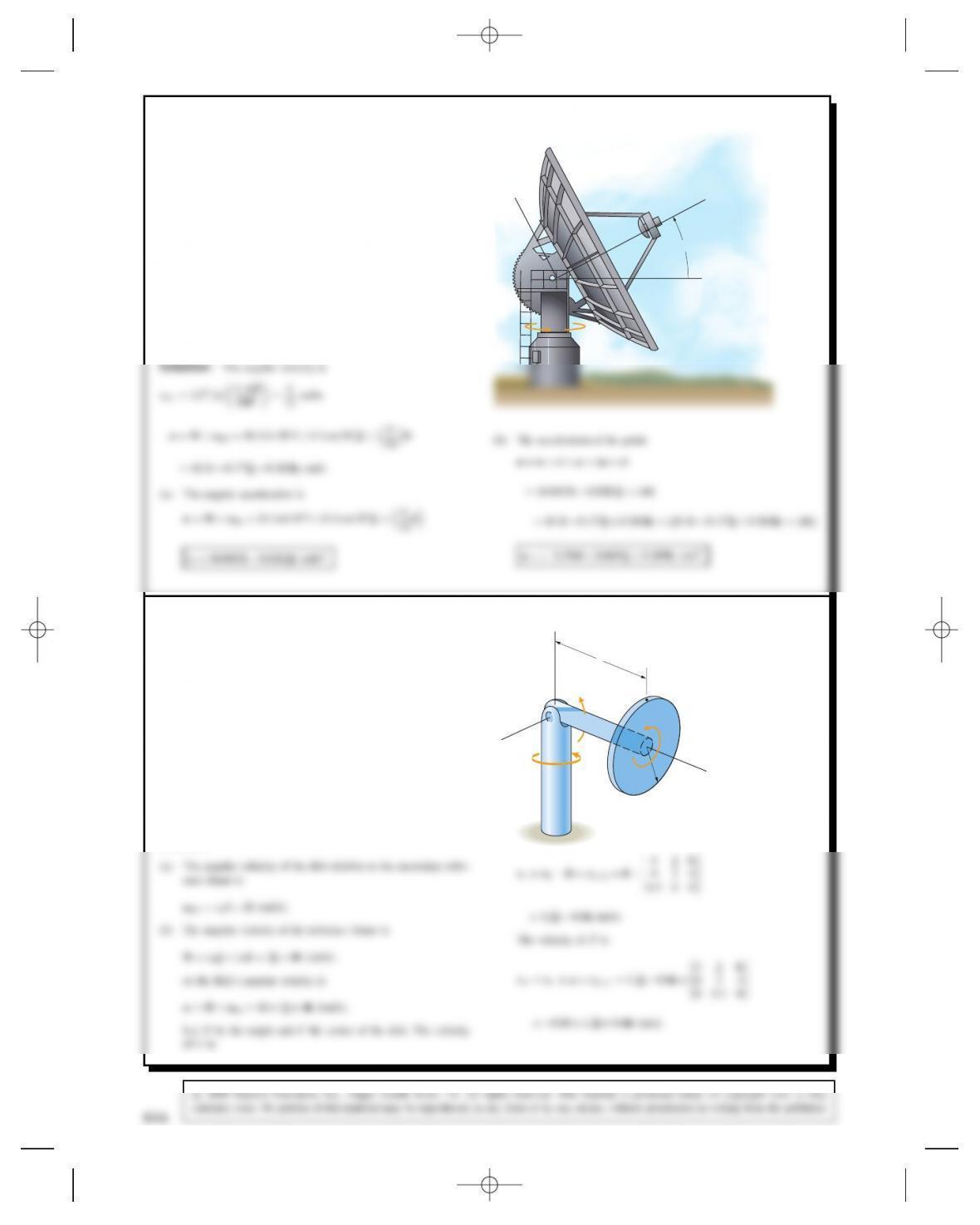
Problem 20.12 The vertical shaft supporting the disk
antenna is rotating with a constant angular velocity ω0=
0.2 rad/s. The angle θfrom the horizontal to the antenna’s
axis is 30◦at the instant shown and is increasing at a
constant rate of 15◦per second. The secondary xyz coor-
dinate system shown is fixed with respect to the dish.
(a) What is the dish’s angular acceleration relative to
an earth-fixed reference frame?
(b) Determine the acceleration of the point of the
antenna with coordinates (4, 0, 0) m relative to an
earth-fixed reference frame.
x
y
v
0
u
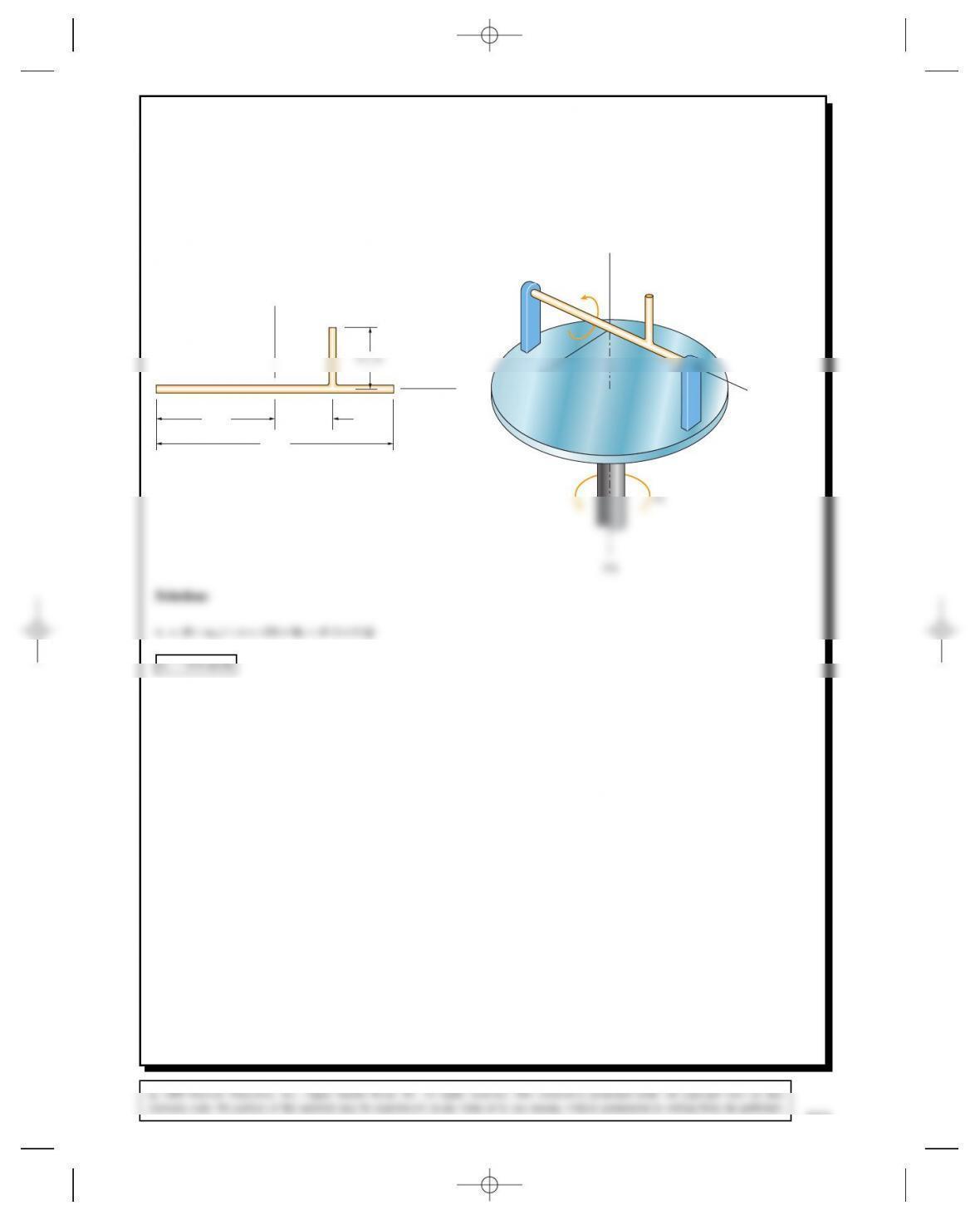
Problem 20.13 The radius of the circular disk is R=
0.2 m, and b=0.3 m. The disk rotates with angular ve-
locity ωd=6 rad/s relative to the horizontal bar. The hor-
izontal bar rotates with angular velocity ωb=4 rad/s
relative to the vertical shaft, and the vertical shaft rotates
with angular velocity ω0=2 rad/s relative to an earth-fixed
reference frame. Assume that the secondary reference
frame shown is fixed with respect to the horizontal bar.
(a) What is the angular velocity vector ωrel of the disk
relative to the secondary reference frame?
(b) Determine the velocity relative to the earth-fixed
reference frame of point P, which is the uppermost
point of the disk.
vb
v0
vd
x
z
y
R
P
b
Solution:
ijk
644
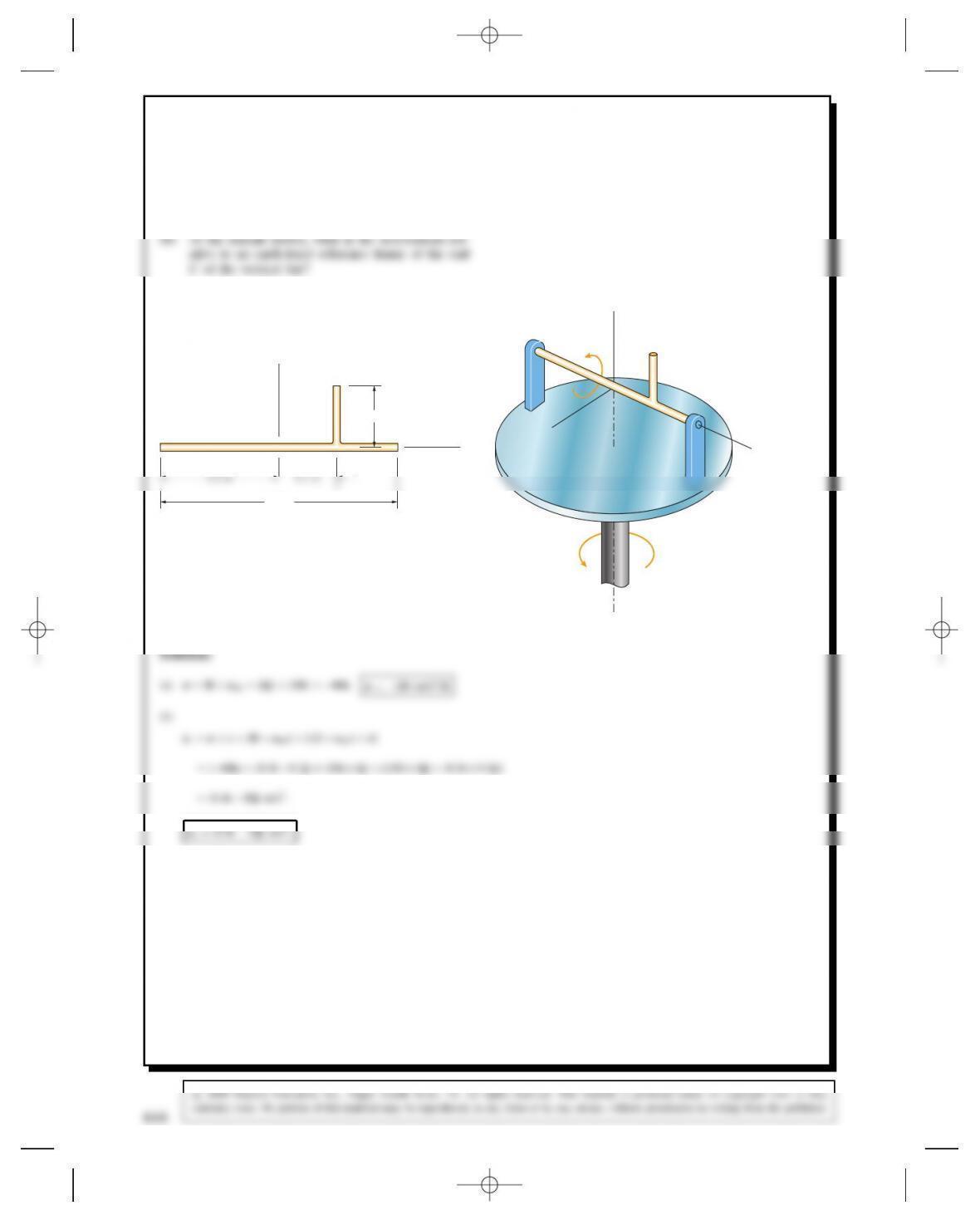
Problem 20.14 The Object in Fig. a is supported by
bearings at Aand Bin Fig. b. The horizontal circu-
lar disk is supported by a vertical shaft that rotates with
angular velocity ω0=6 rad/s. The horizontal bar rotates
with angular velocity ω=10 rad/s. At the instant shown,
what is the velocity relative to an earth-fixed reference
frame of the end Cof the vertical bar?
0.2 m 0.1 m
y
x
0.4 m
y
C
x
A
B
z
v
(a)
Problem 20.15 The object in Fig. a is supported by
bearings at Aand Bin Fig. b. The horizontal circular
disk is supported by a vertical shaft that rotates with
angular velocity ω0=6 rad/s. The horizontal bar rotates
with angular velocity ω=10 rad/s.
(a) What is the angular acceleration of the object rel-
ative to an earth-fixed reference frame?
0.4 m
v0
(a)
(b)
646
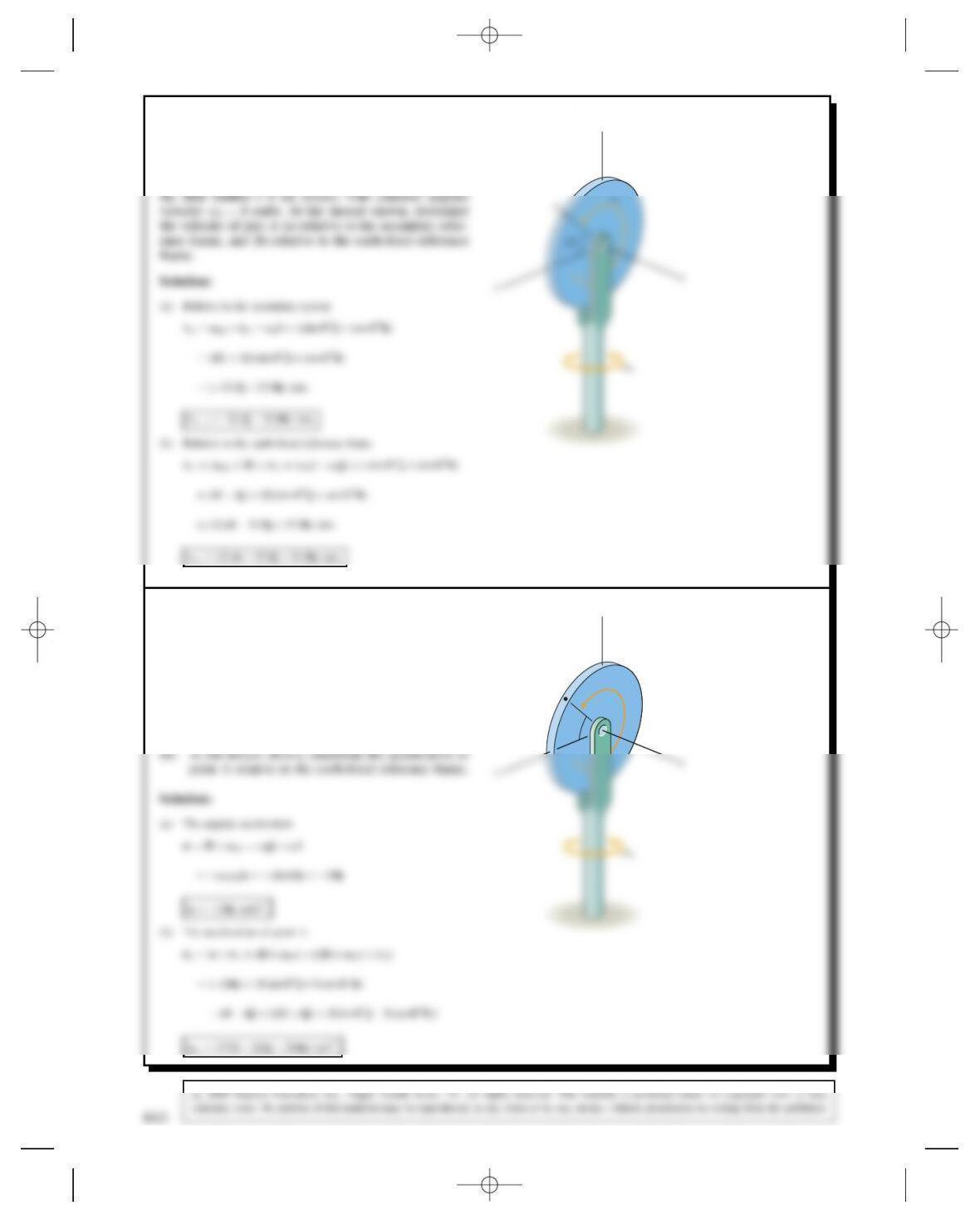
Problem 20.16 Relative to a primary reference frame,
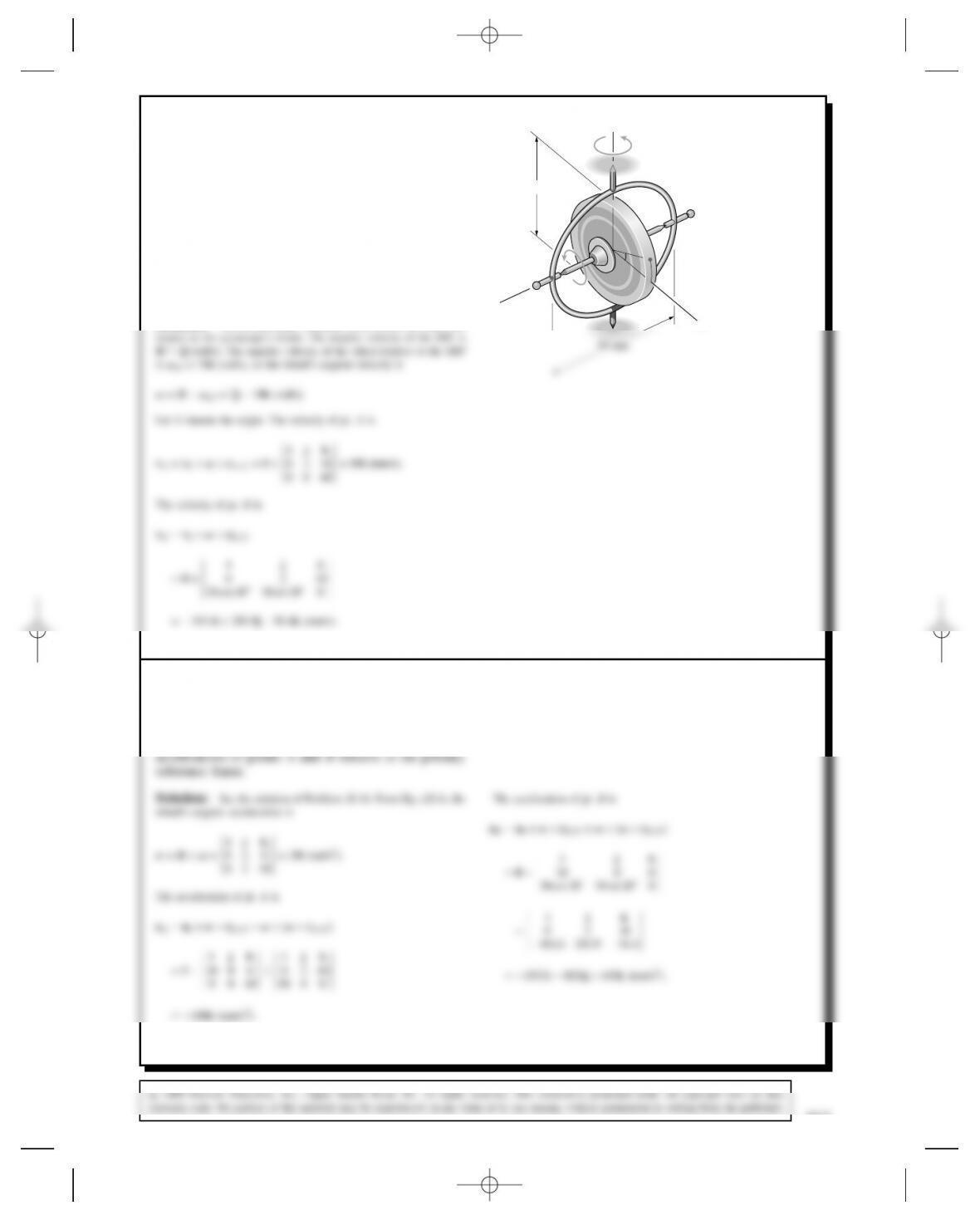
the gyroscope’s circular frame rotates about the vertical
axis at 2 rad/s. The 60-nm diameter wheel rotates at
10 rad/s relative to the frame. Determine the velocities of
points Aand Brelative to the primary reference frame.
10
rad/s
z
A
B
x
2 rad/s
y
20°
60 mm
Solution: Let the secondary reference frame shown be fixed with
Problem 20.17 Relative to a primary reference frame,
the gyroscope’s circular frame rotates about the vertical
axis with a constant angular velocity of 2 rad/s. The
60-mm diameter wheel rotates with a constant angular
velocity of 10 rad/s relative to the frame. Determine the
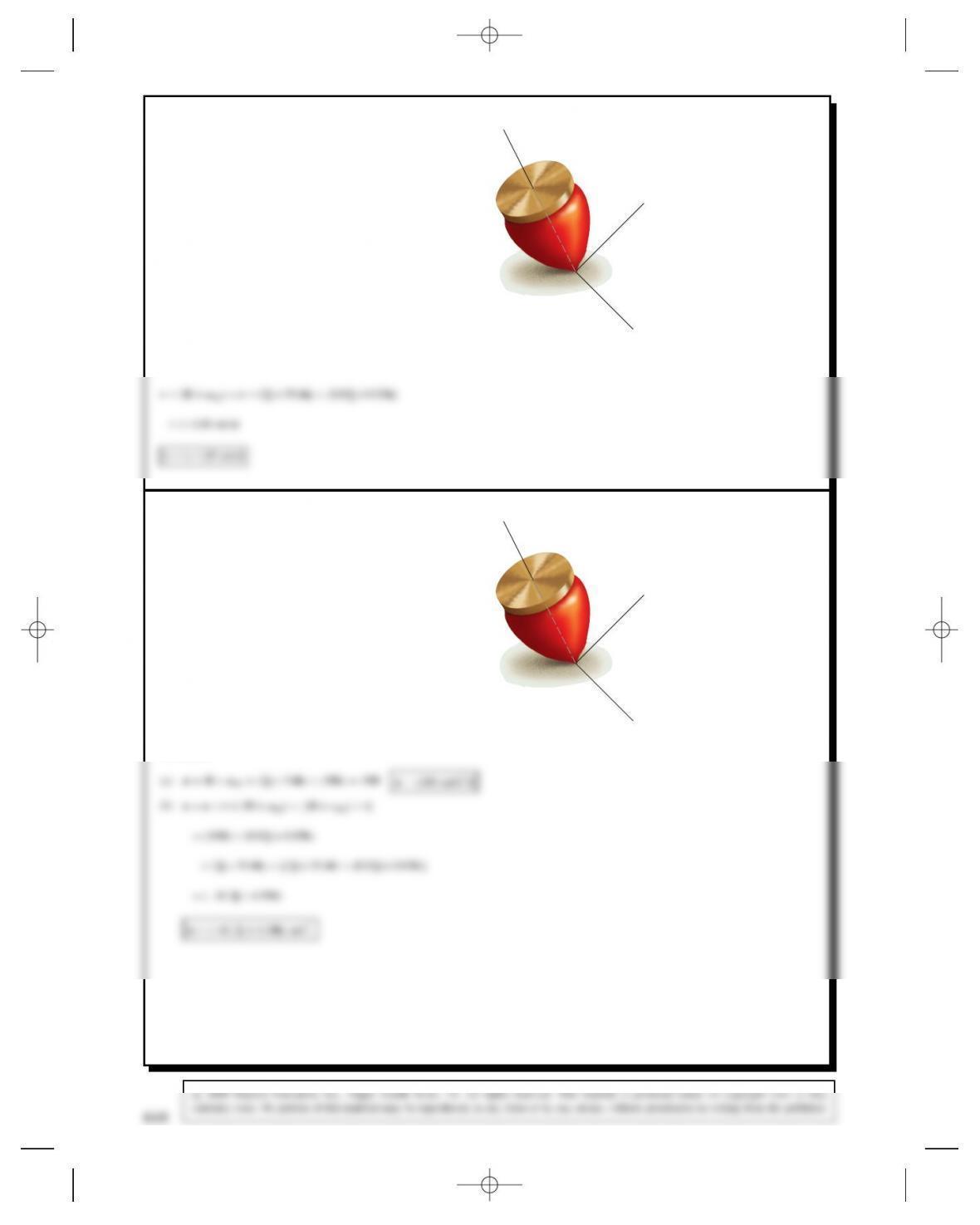
Problem 20.18 The point of the spinning top remains
at a fixed point on the floor, which is the origin Oof
the secondary reference frame shown. The top’s angu-
lar velocity relative to the secondary reference frame,
ωrel =50k(rad/s), is constant. The angular velocity of
the secondary reference frame relative to an earth-fixed
primary reference frame is =2j+5.6k(rad/s). The
components of this vector are constant. (Notice that it
is expressed in terms of the secondary reference frame.)
Determine the velocity relative to the earth-fixed ref-
erence frame of the point of the top with coordinates
(0, 20, 30) mm.
x
y
z
O
Solution:
Problem 20.19 The point of the spinning top remains
at a fixed point on the floor, which is the origin Oof
the secondary reference frame shown. The top’s angu-
lar velocity relative to the secondary reference frame,
ωrel =50k(rad/s), is constant. The angular velocity of
the secondary reference frame relative to an earth-fixed
primary reference frame is =2j+5.6k(rad/s). The
components of this vector are constant. (Notice that it is
expressed in terms of the secondary reference frame.)
(a) What is the top’s angular acceleration relative to
the earth-fixed reference frame?
(b) Determine the acceleration relative to the earth-
fixed reference frame of the point of the top with
coordinates (0, 20, 30) mm. x
y
z
O
Solution:
648
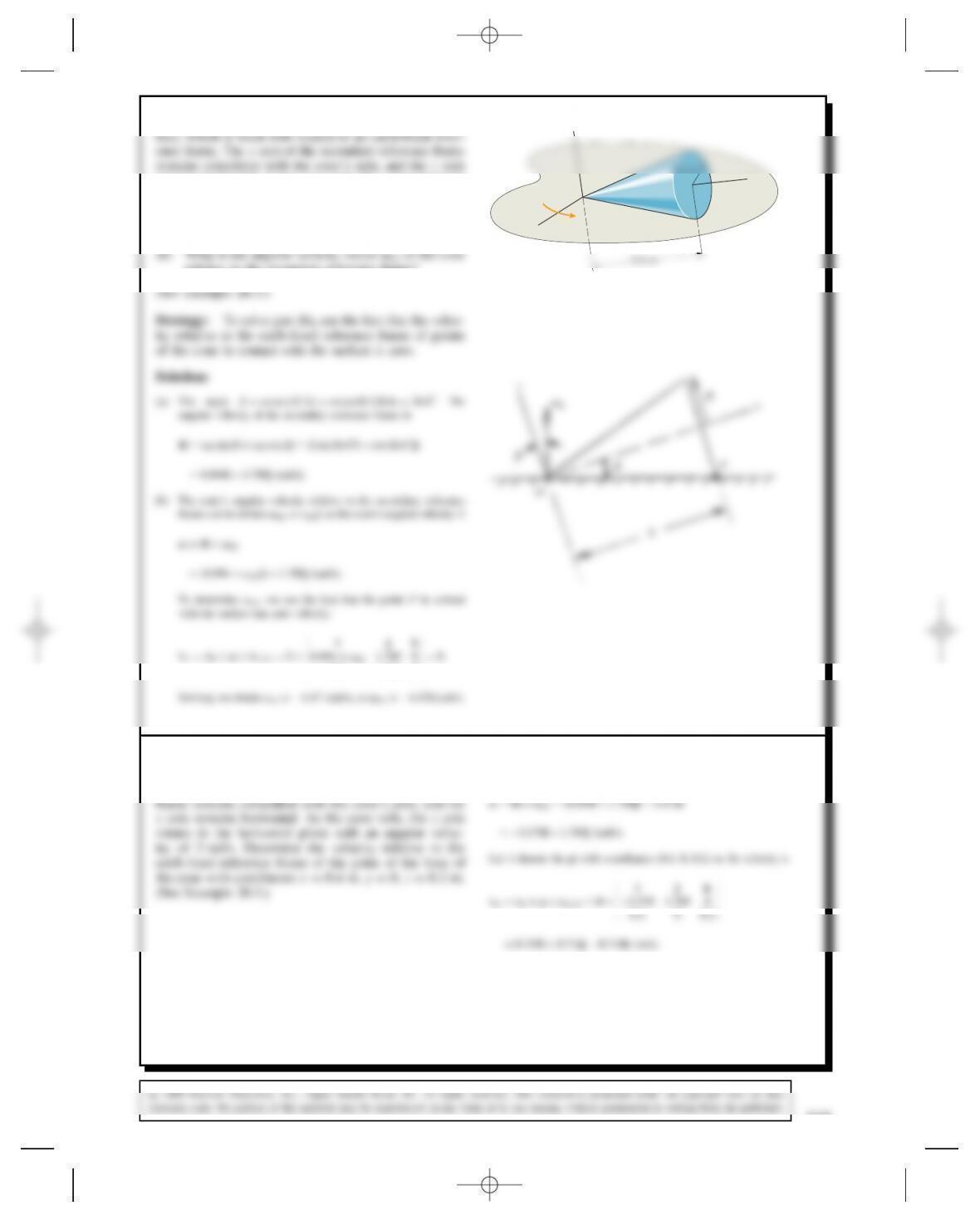
Problem 20.20* The cone rolls on the horizontal sur-
remains horizontal. As the cone rolls, the zaxis rotates in
the horizontal plane with an angular velocity of 2 rad/s.
(a) What is the angular velocity vector of the sec-
ondary reference frame?
relative to the secondary reference frame?
z
y
0.4 m
x
2 rad/s
0.2 m
0.4−0.20
Solving, we obtain ωrel =−4.47 (rad/s), so ωrel =−4.47i(rad/s).
Problem 20.21* The cone rolls on the horizontal sur-
face, which is fixed with respect to an earth-fixed ref-
erence frame. The xaxis of the secondary reference
Solution: See the solution of Problem 20.20. The cone’s angular
velocity is
Problem 20.22* The cone rolls on the horizontal sur-
face, which is fixed with respect to an earth-fixed refer-
ence frame. The xaxis of the secondary reference frame
remains coincident with the cone’s axis, and the zaxis
Solution: See the solutions of Problems 20.20 and 20.21. The
cone’s angular acceleration is
ijk
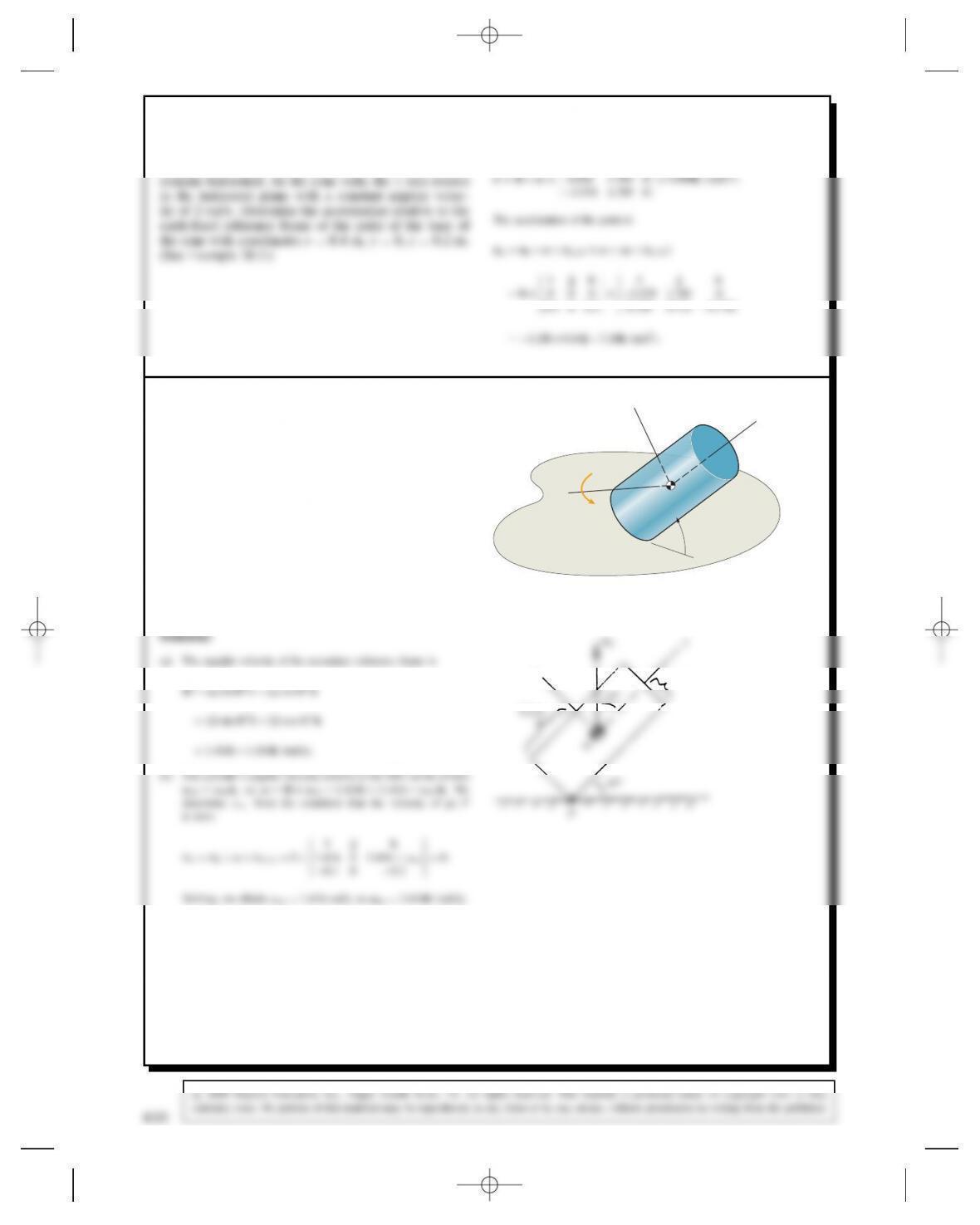
Problem 20.23* The radius and length of the cylinder
are R=0.1 m and l=0.4 m. The horizontal surface is
fixed with respect to an earth-fixed reference frame. One
end of the cylinder rolls on the surface while its center,
the origin of the secondary reference frame, remains sta-
tionary. The angle β=45◦. The zaxis of the secondary
reference frame remains coincident with the cylinder’s
axis, and the yaxis remains horizontal. As the cylinder
rolls, the yaxis rotates in a horizontal plane with angular
velocity ω0=2 rad/s.
(a) What is the angular velocity vector of the sec-
ondary reference frame?
(b) What is the angular velocity vector ωrel of the cylin-
der relative to the secondary reference frame?
x
y
z
v0
b
650

Problem 20.24* The radius and length of the cylinder
are R=0.1 m and l=0.4 m. The horizontal surface is
fixed with respect to an earth-fixed reference frame. One
z=0.2m.
Solution: See the solution of Problem 20.23. The cylinder’s angu-
0.100.2
Problem 20.25* The landing gear of the P-40 airplane
used in World War II retracts by rotating 90◦about
the horizontal axis toward the rear of the airplane. As
that the wheel is horizontal in the retracted position.
(Viewed from the horizontal axis toward the wheel, the
strut rotates in the clockwise direction.) The xaxis of the
coordinate system shown remains parallel to the horizon-
tal axis and the yaxis remains parallel to the strut as the
z
Retracted
position

Problem 20.26 In Active Example 20.4, suppose that
the shaft supporting the disk is initially stationary, and
at t=0 it is subjected to a constant angular acceleration
α0in the counterclockwise direction viewed from above
the disk. Determine the force and couple exerted on the
Problem 20.27 In Example 20.5, suppose that the hor-
izontal plate is initially stationary, and at t=0 the robotic
manipulator exerts a couple Con the plate at the fixed
Solution: The mass of the plate is 4 kg. Point Ois a fixed point.
The nonzero inertias are
Ixx =1
Cx
11.8
0.48 −0.18 0
150
652
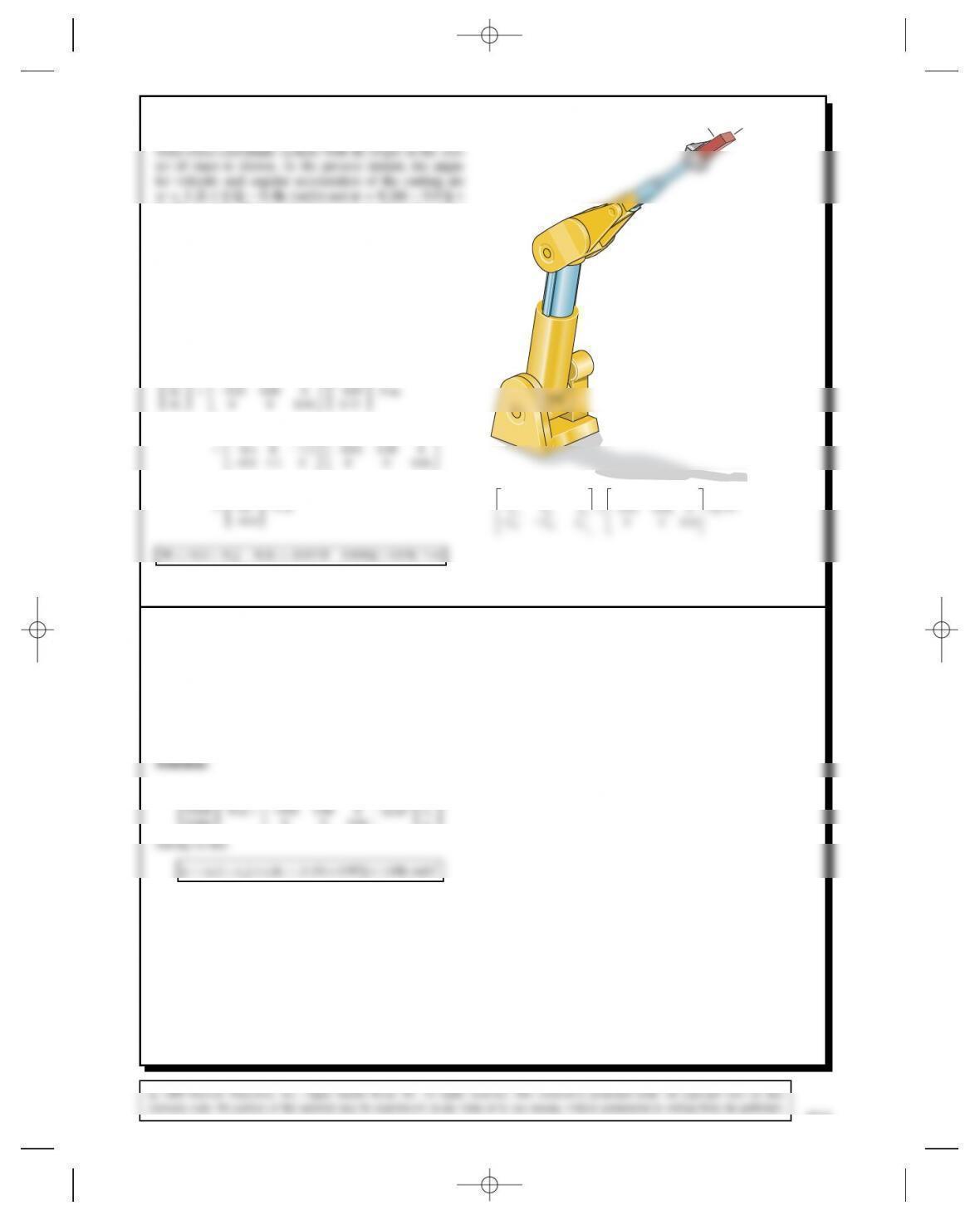
Problem 20.28 A robotic manipulator moves a cast-
ing. The inertia matrix of the casting in terms of a
0.13k(rad/s2). What moment is exerted about the center
of mass of the casting by the manipulator?
x
y
Solution:
Mx
0.05 −0.03 0
0.26
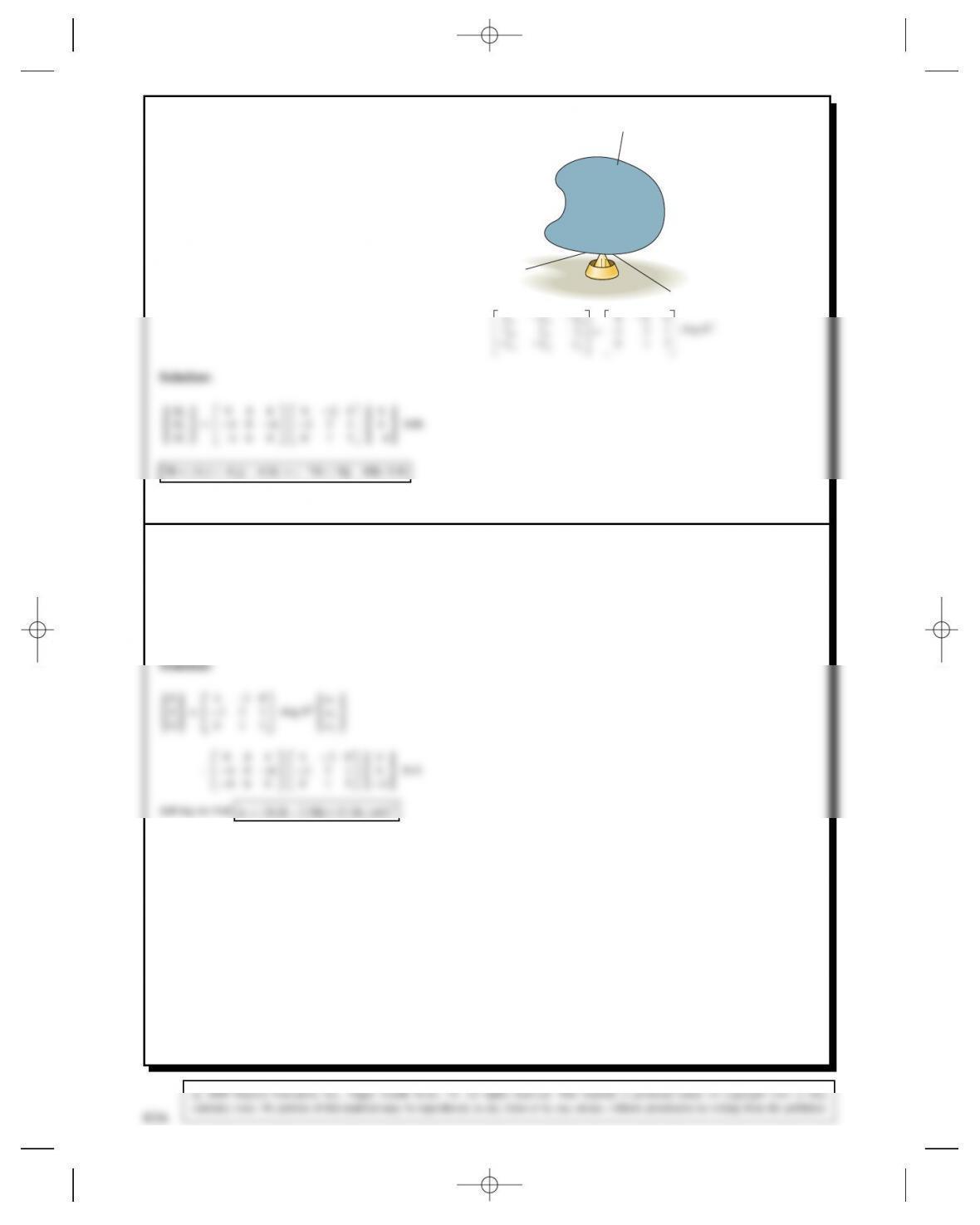
Problem 20.29 A robotic manipulator holds a cast-
ing. The inertia matrix of the casting in terms of a
body-fixed coordinate system with its origin at the cen-
ter of mass is shown. At the present instant, the cast-
ing is stationary. If the manipulator exerts a moment
M=0.042i+0.036j+0.066k(N-m) about the cen-
ter of mass, what is the angular acceleration of the cast-
ing at that instant?
0.042
0.066
0.05 −0.03 0
000.04
αx
αz
Problem 20.30 The rigid body rotates about the fixed
point O. Its inertia matrix in terms of the body-fixed
coordinate system is shown. At the present instant, the
rigid body’s angular velocity is ω=6i+6j−4k(rad/s)
and its angular acceleration is zero. What total moment
about Ois being exerted on the rigid body?
y
z
O
x
Problem 20.31 The rigid body rotates about the fixed
point O. Its inertia matrix in terms of the body-fixed
coordinate system is shown. At the present instant,
the rigid body’s angular velocity is ω=6i+6j−
4k(rad/s). The total moment about Odue to the forces
and couples acting on the rigid body is zero. What is its
angular acceleration?
654
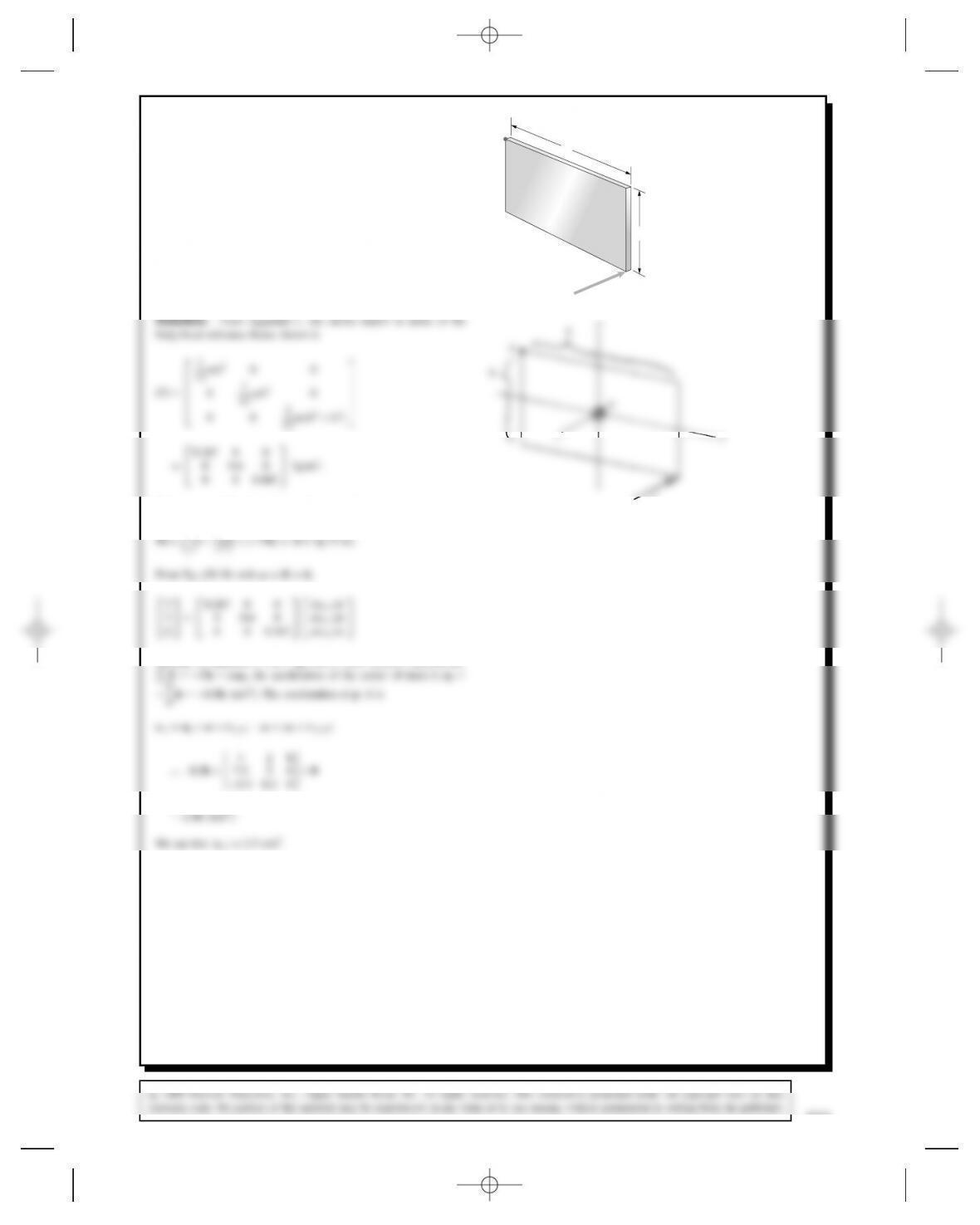
Problem 20.32 The dimensions of the 20-kg thin plate
are h=0.4 m and b=0.6 m. The plate is stationary
relative to an inertial reference frame when the force
F=10 N is applied in the direction perpendicular to
the plate. No other forces or couples act on the plate. At
the instant Fis applied, what is the magnitude of the
acceleration of point Arelative to the inertial reference
frame?
F
A
b
h

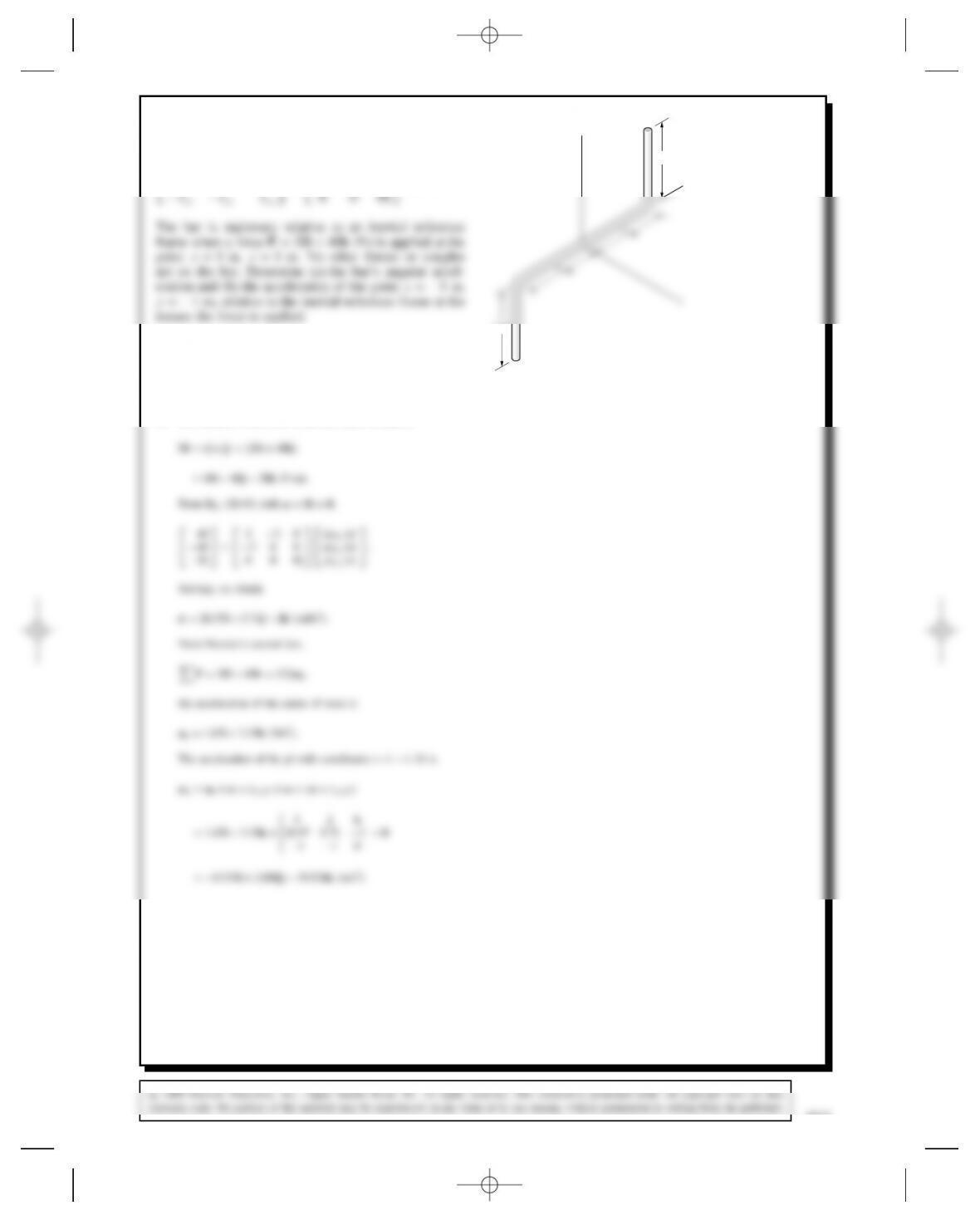
Problem 20.33 In terms of the coordinate system
shown, the inertia matrix of the 6-kg slender bar is
003.167 kg-m2.
The bar is stationary relative to an inertial reference
frame when the force F=12k(N) is applied at the right
end of the bar. No other forces or couples act on the bar.
Determine
(a) the bar’s angular acceleration relative to the inertial
reference frame and
(b) the acceleration of the right end of the bar relative
to the inertial reference frame at the instant the
force is applied.
y
2 m
656
Problem 20.34 In terms of the coordinate system
shown, the inertia matrix of the 12-kg slender bar is
Ixx −Ixy −Ixz
−Iyx Iyy −Iyz
−38 0
kg-m2.
y
x
1 m
1 m
Solution:
(a) The moment of the force about the center of mass is
Problem 20.35 The inertia matrix of the 2.4-kg plate
in terms of the given coordinate system is shown.
The angular velocity of the plate is ω=6.4i+8.2j+
14k(rad/s), and its angular acceleration is α=60i+
40j−120k(rad/s2). What are the components of the
total moment exerted on the plate about its center
of mass?
y
50 mm
150 mm
220 mm
My
0.00876 0.00396 0
60
−2.057
Problem 20.36 The inertia matrix of the 2.4-kg plate
in terms of the given coordinate system is shown. At
t=0, the plate is stationary and is subjected to a force
F=−10k(N) at the point with coordinates (220,0,0)
mm. No other forces or couples act on the plate. Deter-
mine (a) the acceleration of the plate’s center of mass
and (b) the plate’s angular acceleration at the instant the
force is applied.
Solution:
Equation (20.19) is
658