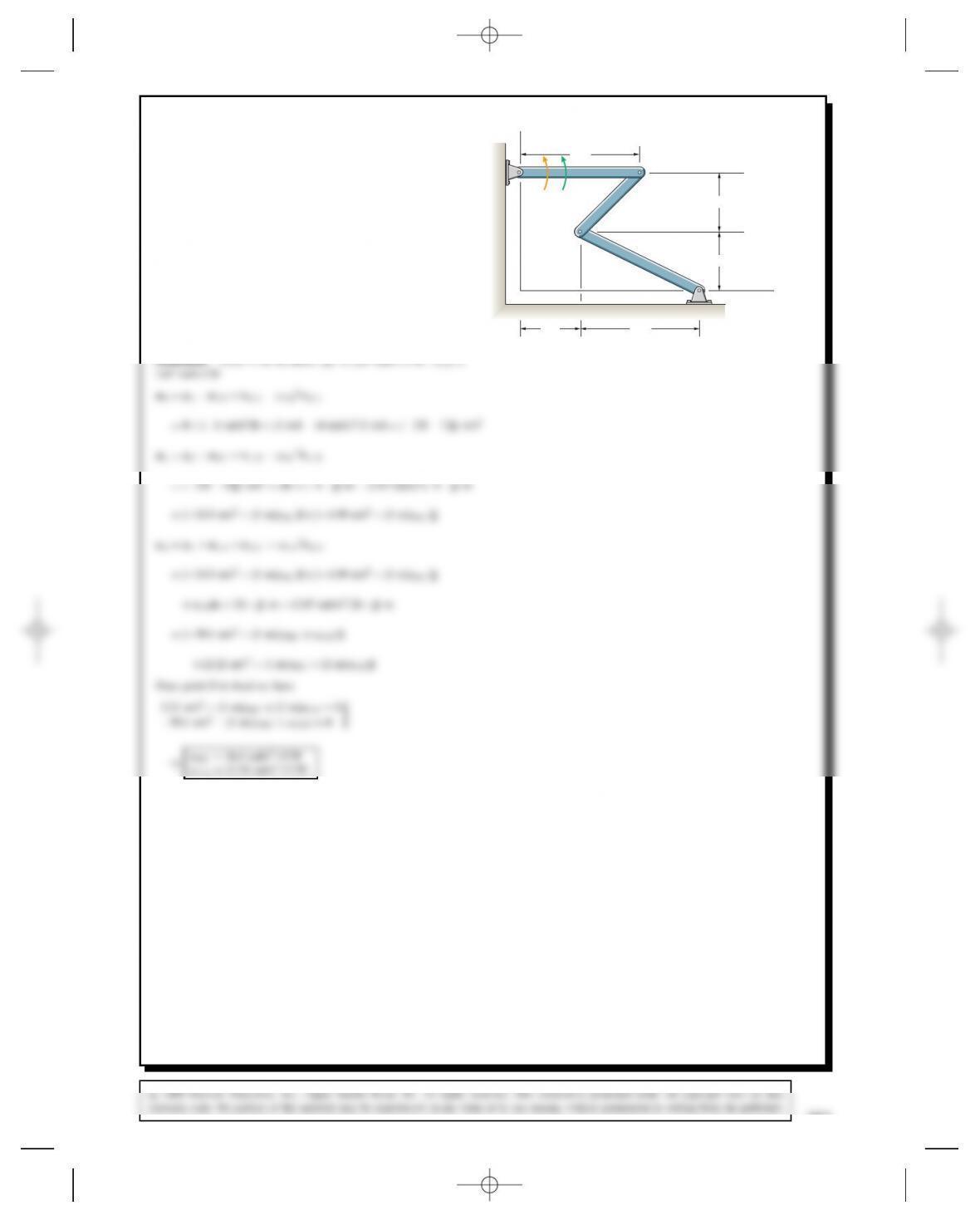
Problem 17.96 The angular velocity and angular
acceleration of bar AB are ωAB =4 rad/s and αAB =
−6 rad/s2. Determine the angular accelerations of bars
BC and CD.
C
1 m
2 m
AB
D
1 m
1 m 2 m
y
x
vAB aAB
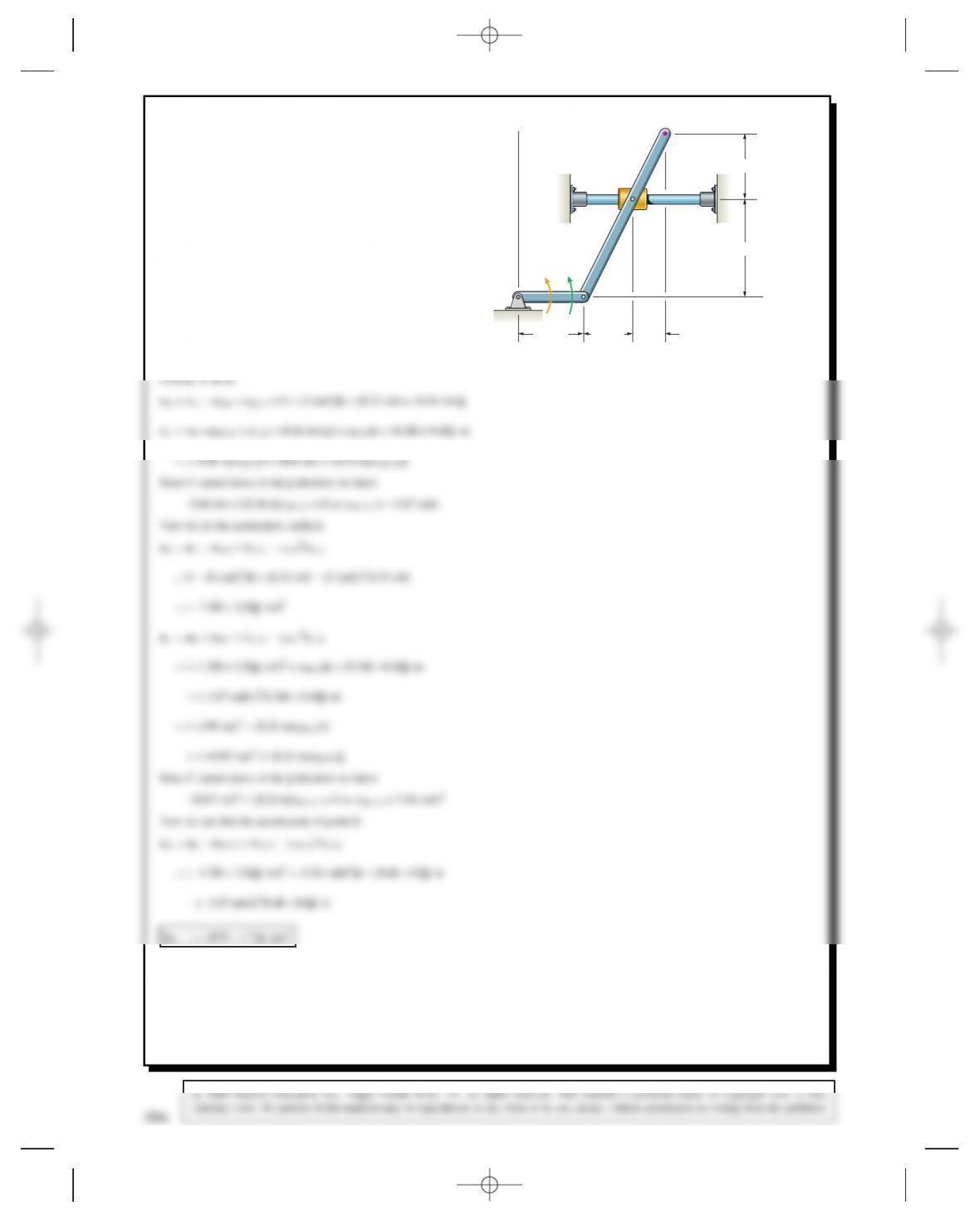
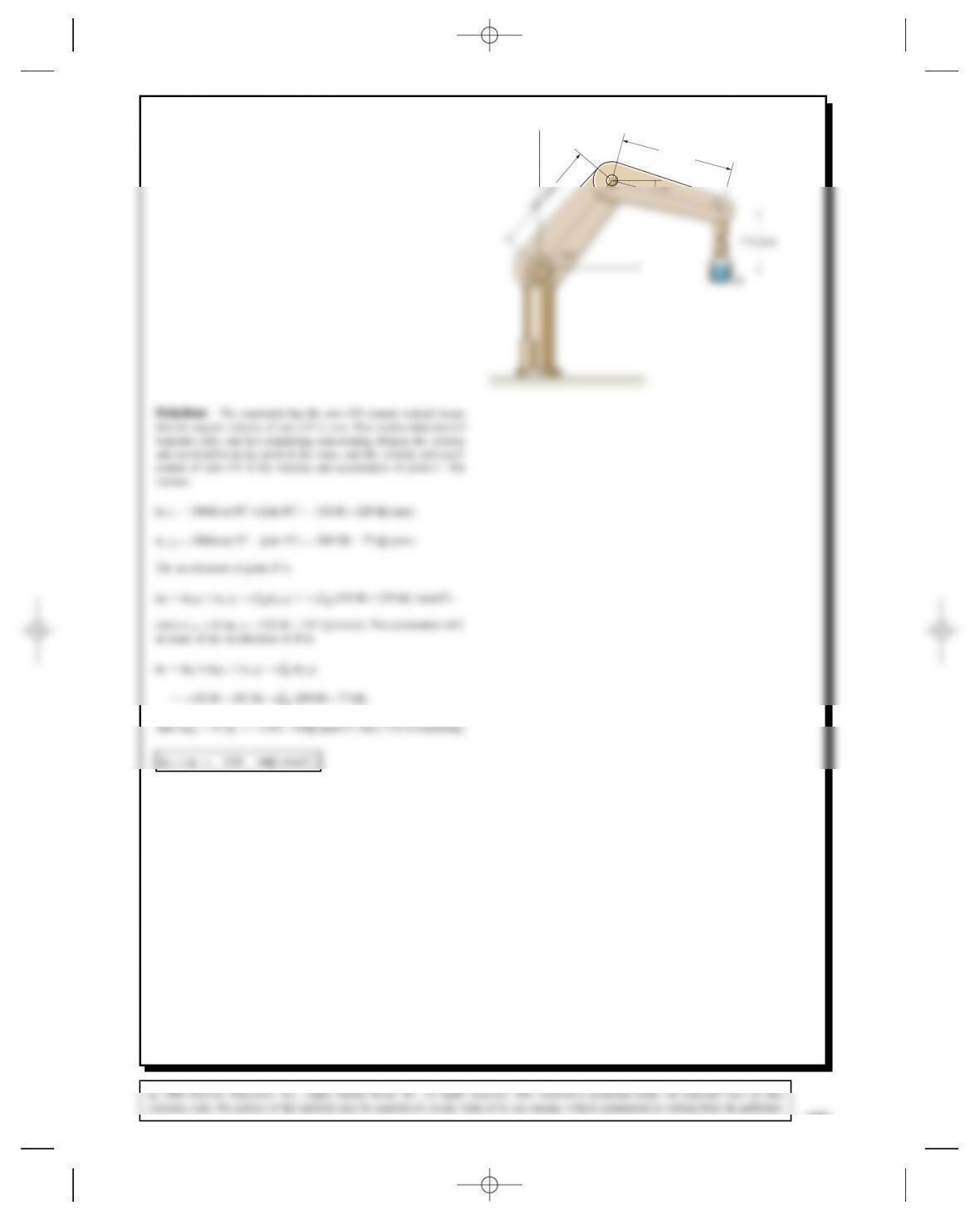
Problem 17.97 The angular velocity and angular
acceleration of bar AB are ωAB =2 rad/s and αAB =
8 rad/s2. What is the acceleration of point D?
y
0.32 m
0.48 m
0.16 m0.24 m0.32 m
ABx
D
C
vAB aAB
Solution: First we must do a velocity analysis to find the angular
394
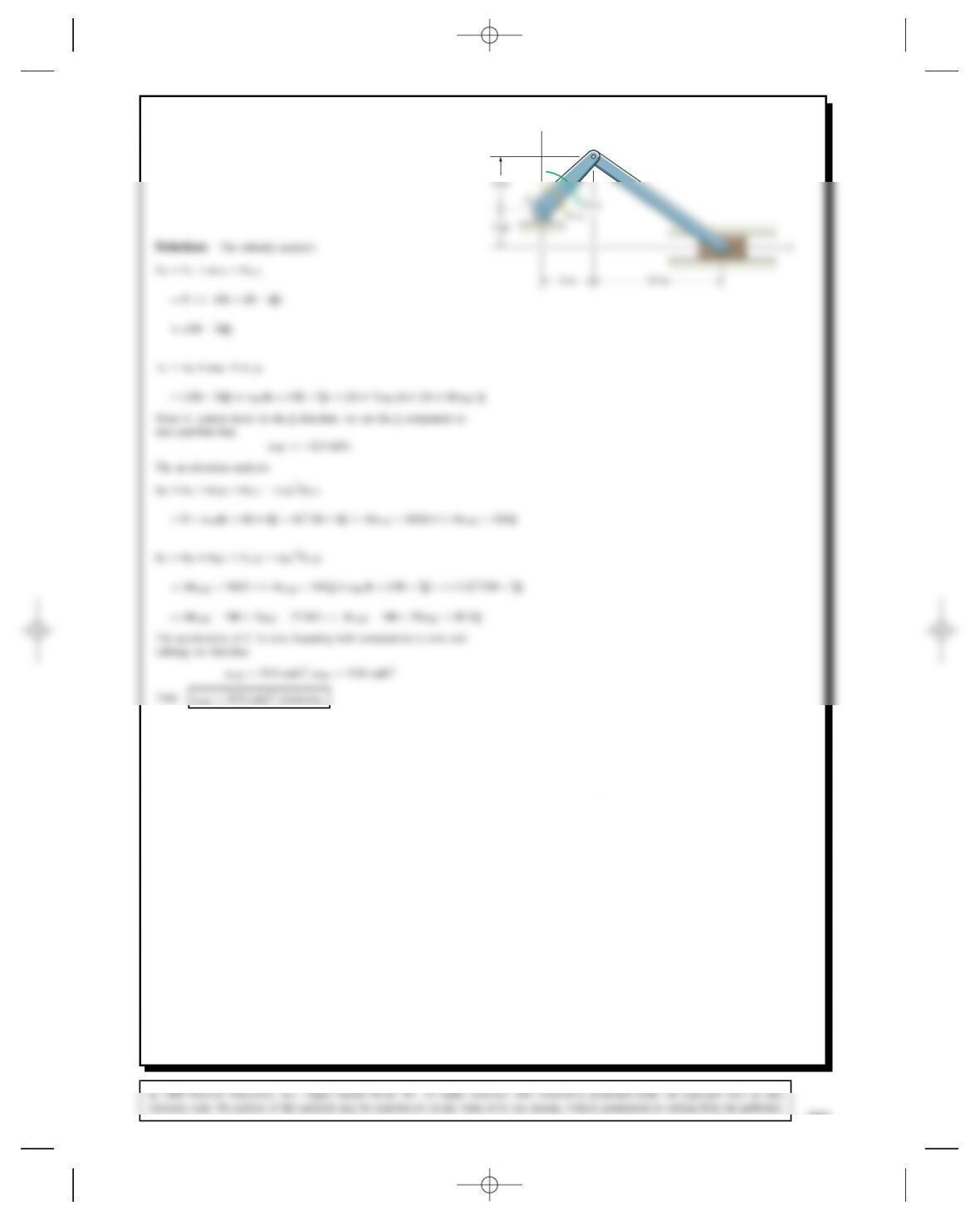
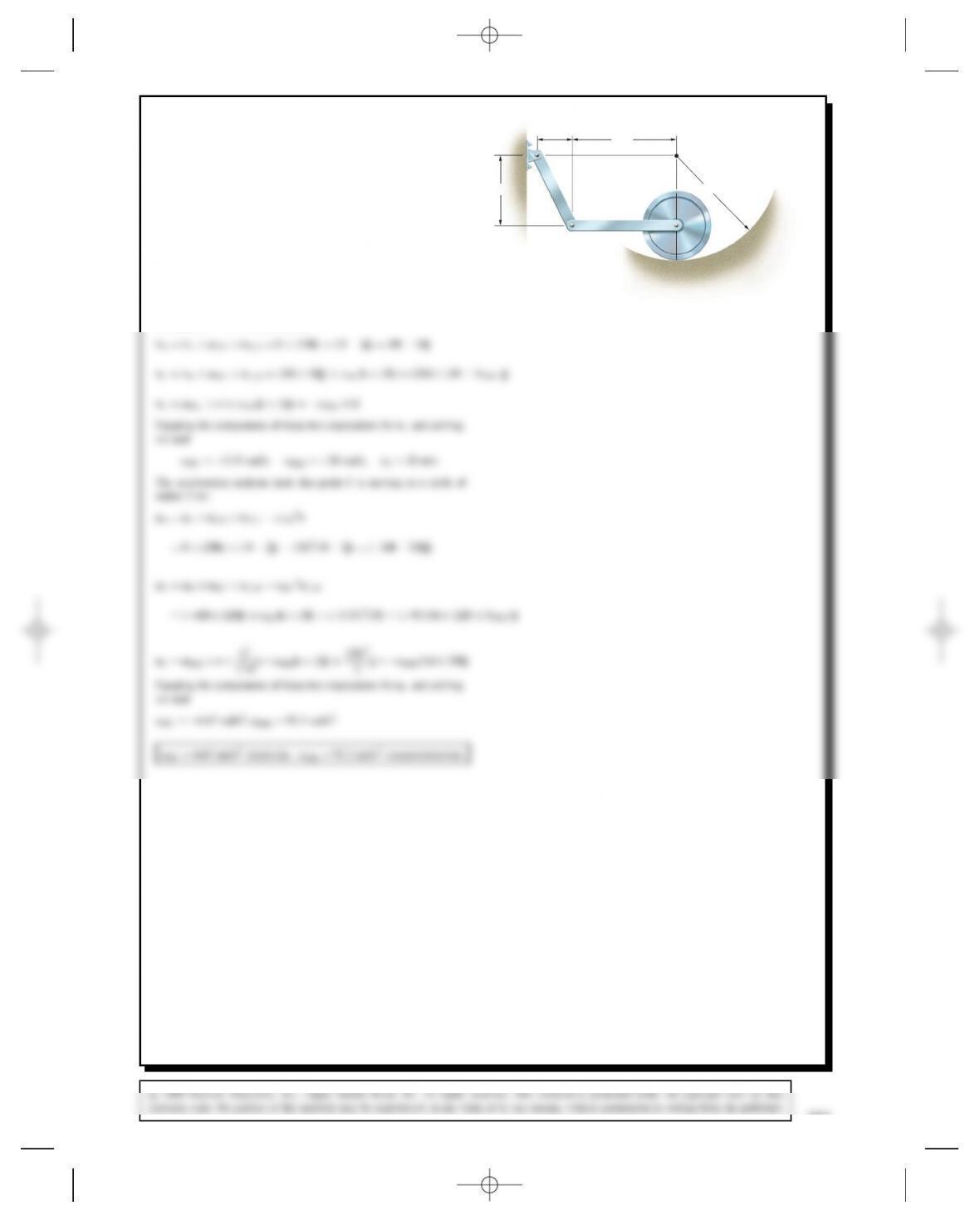
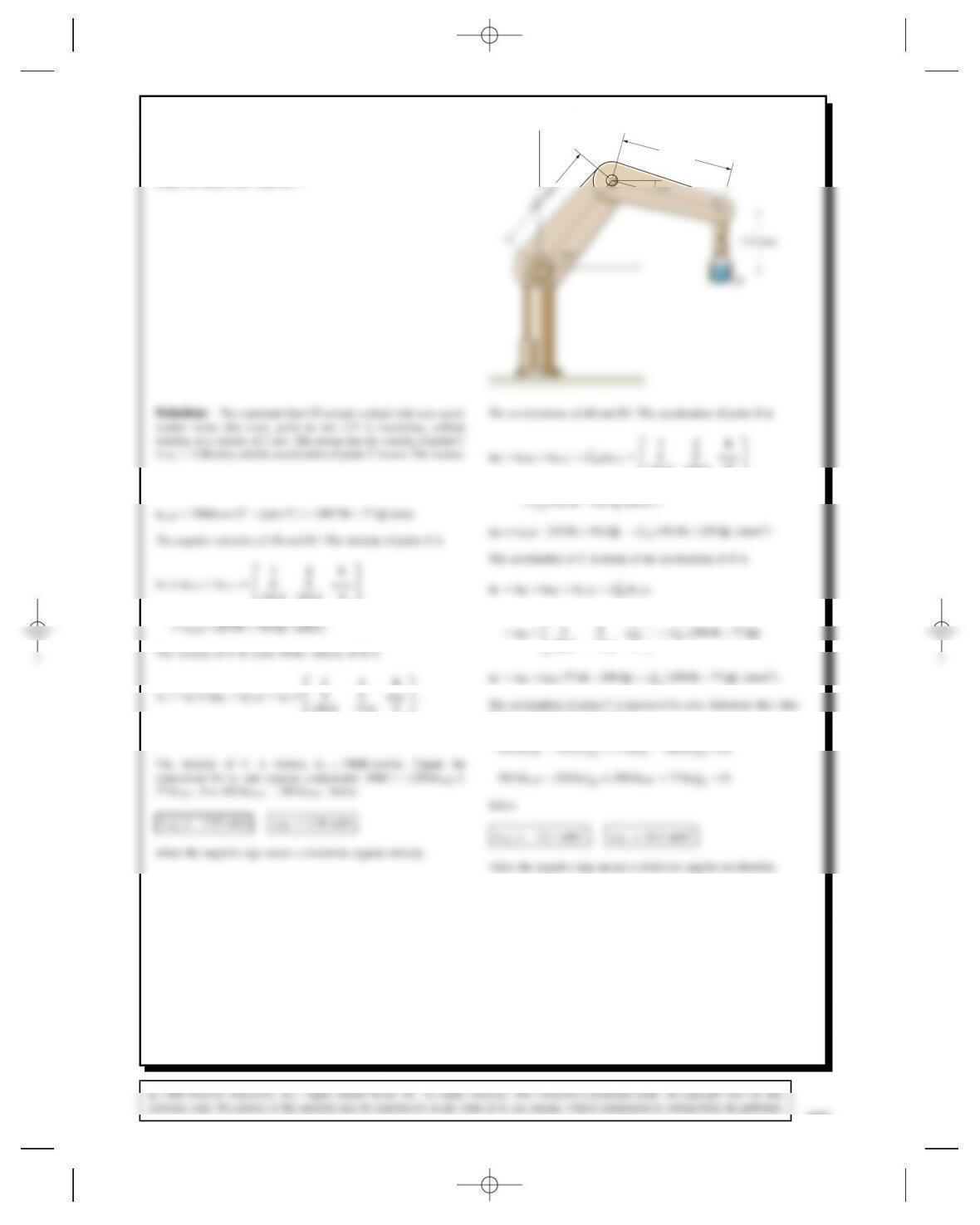
Problem 17.98 The angular velocity ωAB =6 rad/s. If
the acceleration of the slider Cis zero at the instant
shown, what is the angular acceleration αAB ?
B
4 in
3 in
y
v
AB
AB
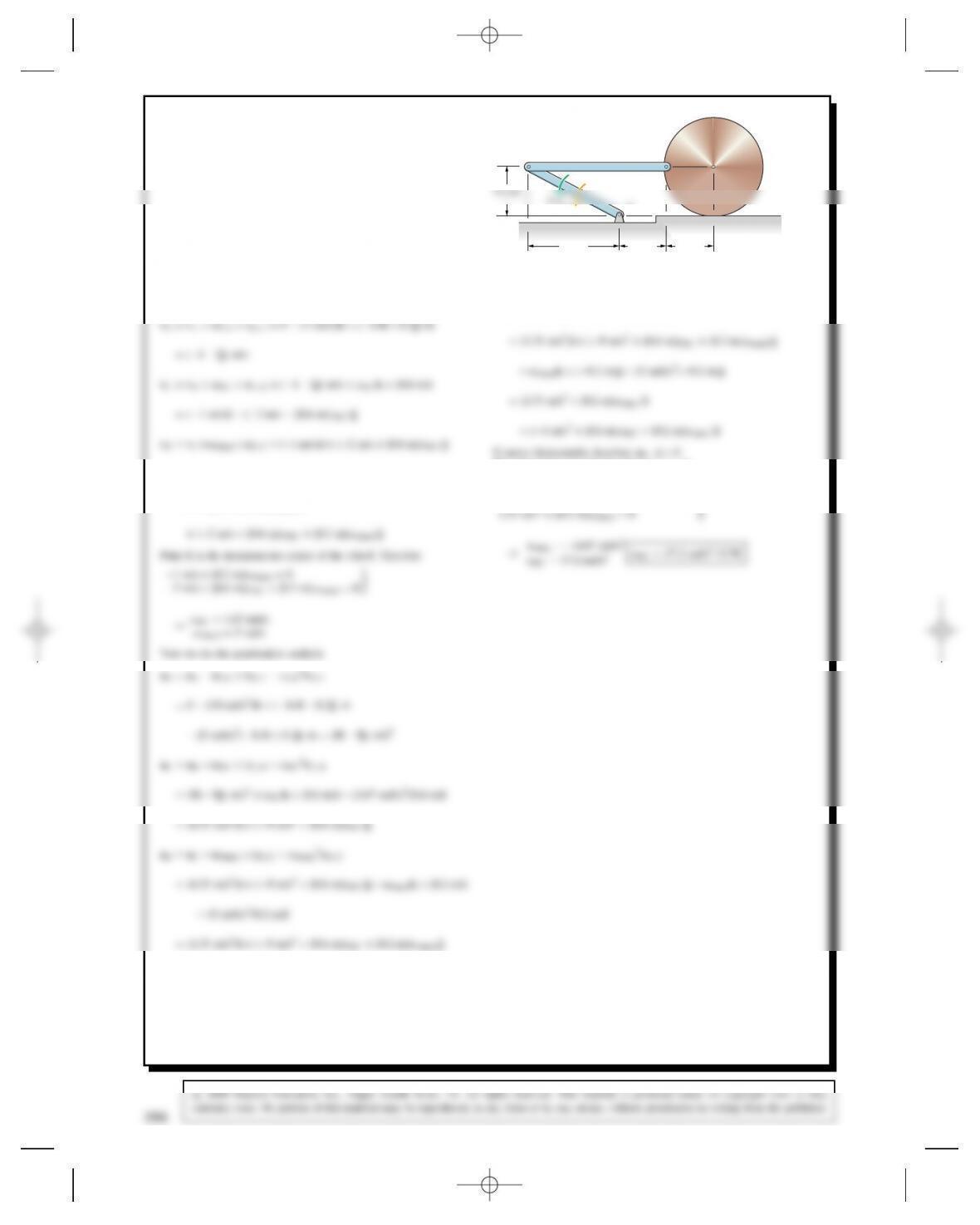
Problem 17.99 The angular velocity and angular
acceleration of bar AB are ωAB =5 rad/s and αAB =
10 rad/s2. Determine the angular acceleration of bar BC.C
0.4 m 0.2 m 0.2 m
D
A
B
vAB
aAB
Solution: Do a velocity analysis first to find all of the angular
velocities. Let point E be the point on the wheel that is in contact with
the ground.
+ωwheelk×(0.2i−0.2j)m
=(−1 m/s +{0.2 m}ωwheel)i
Finally we work down to point E
aE=aD+αwheel ×rE/D −ωwheel2rE/D
The wheel does not slip therefore aE·i=0
We have
−9 m/s2+{0.6 m}αBC +{0.2 m}αwheel =0
396
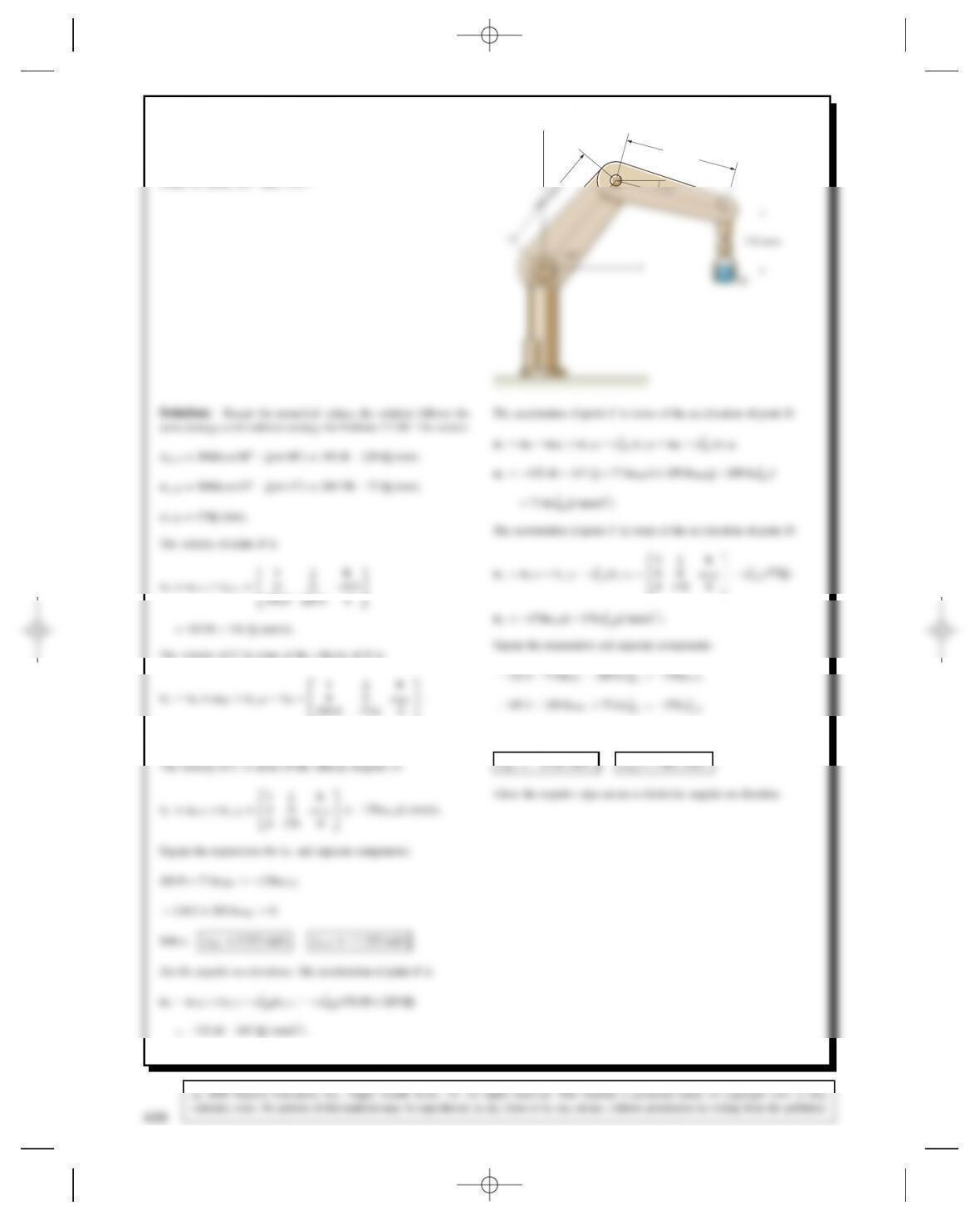
Problem 17.100 At the instant shown, bar AB is rotat-
ing at 10 rad/s in the counterclockwise direction and
has a counterclockwise angular acceleration of 20 rad/s2.
The disk rolls on the circular surface. Determine the
angular accelerations of bar BC and the disk. 2 m
A
B
C
3 m
3 m
1 m
Solution: The velocity analysis:
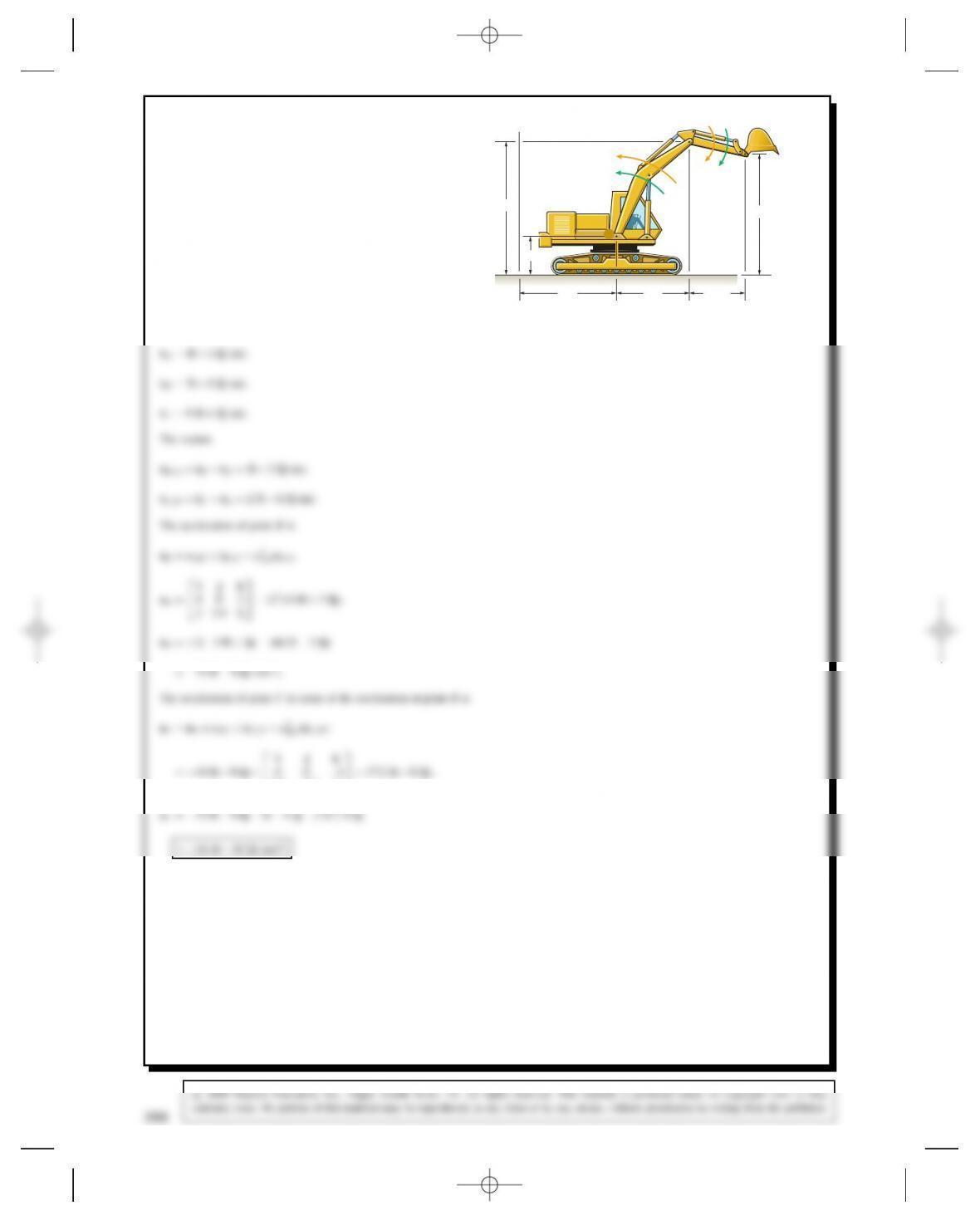
Problem 17.101 If ωAB =2 rad/s, αAB =2 rad/s2,
ωBC =−1 rad/s, and αBC =−4 rad/s2, what is the
acceleration of point Cwhere the scoop of the excavator
is attached?
x
y
B
C
5 m
5.5 m
1.6 m
A
4 m 3 m 2.3 m
BC BC
AB
AB
aa
v
v
Solution: The vector locations of points A,B,Care
398
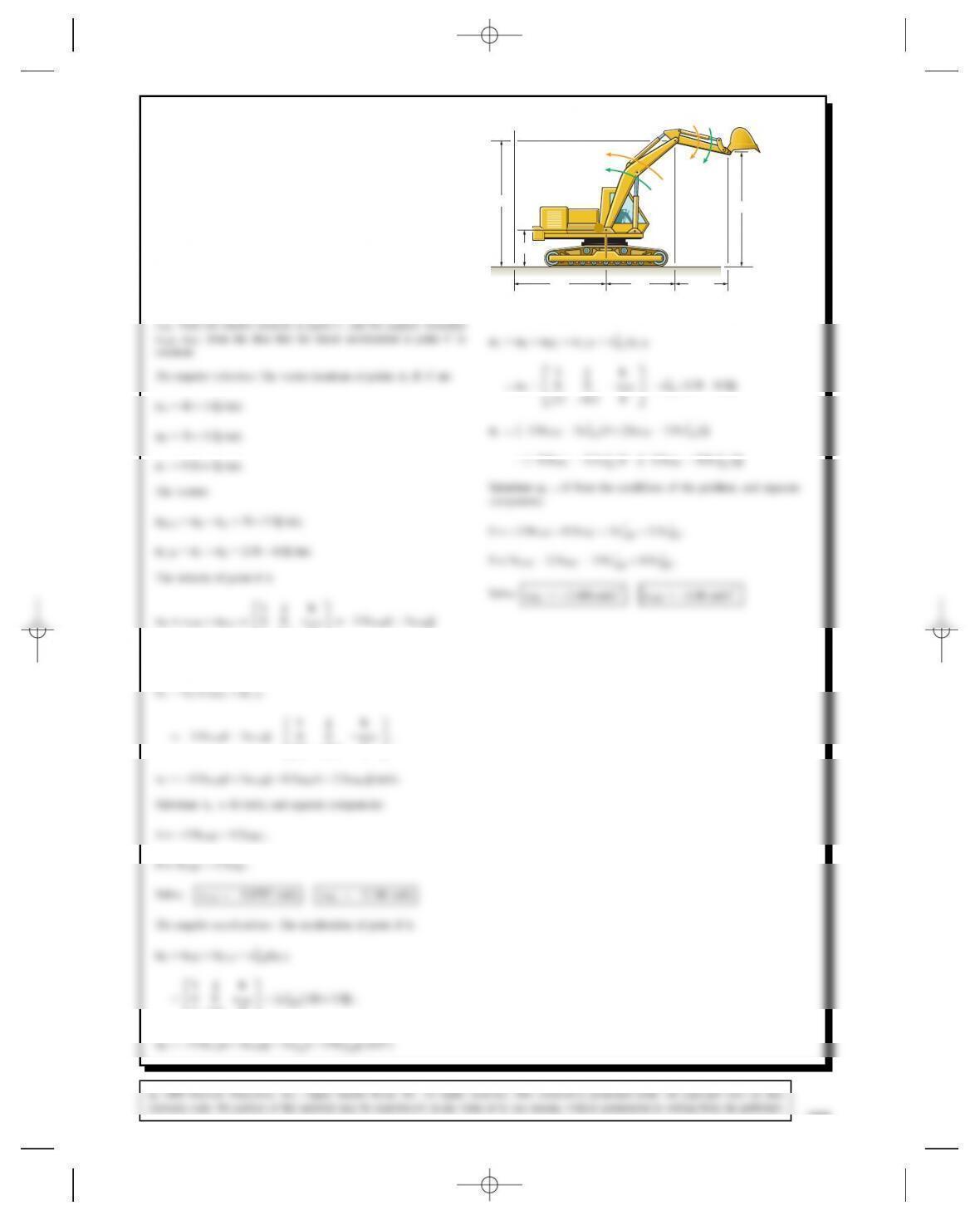
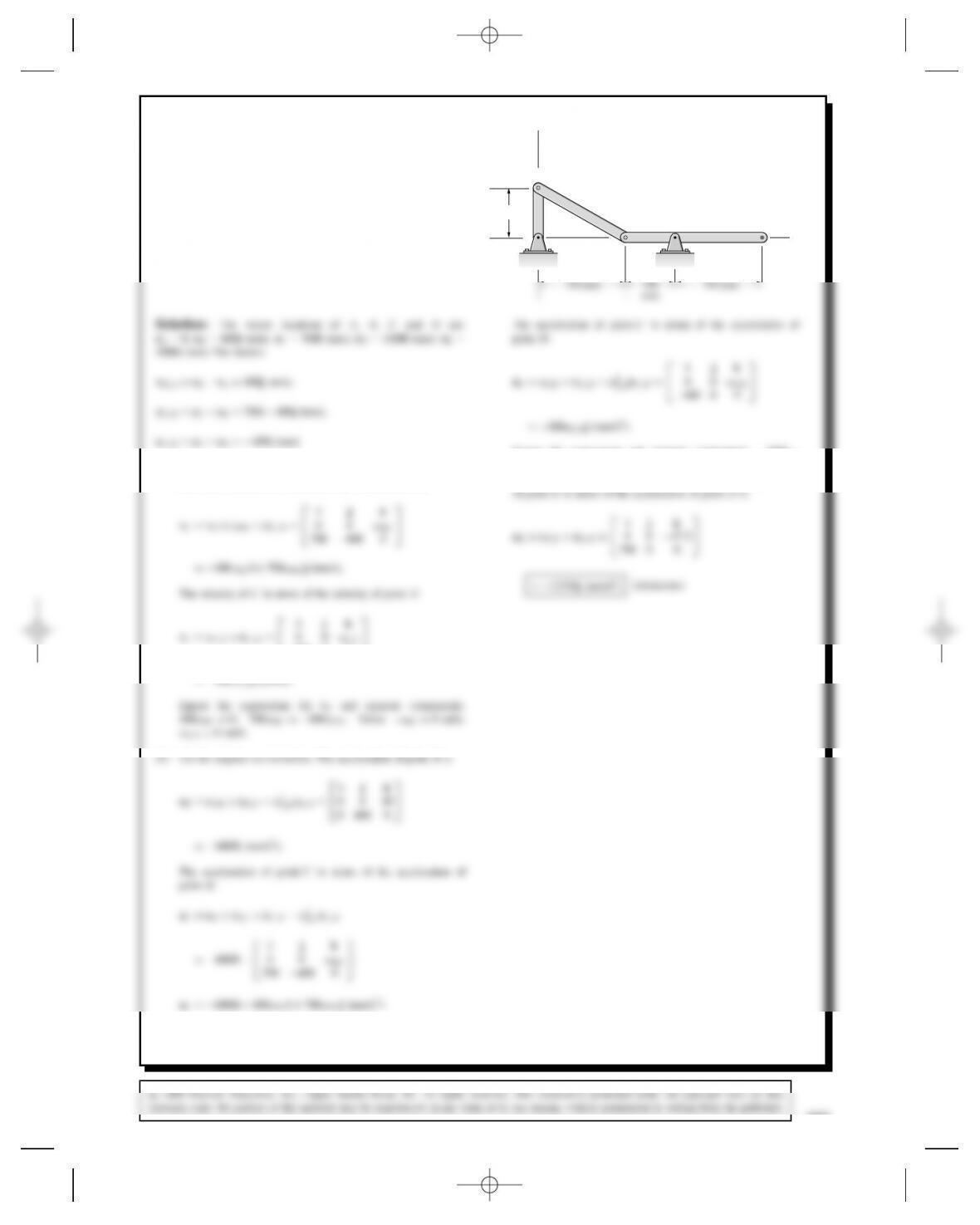
Problem 17.102 If the velocity of point Cof the exca-
vator in Problem 17.101 is vC=4i(m/s) and is con-
stant, what are ωAB ,αAB ,ωBC,αBC?
x
y
B
C
5 m
5.5 m
1.6 m
A
4 m 3 m 2.3 m
BC BC
AB
AB
aa
v
v
Solution: The strategy is to determine the angular velocities ωAB ,
The acceleration of Cin terms of the acceleration of Bis
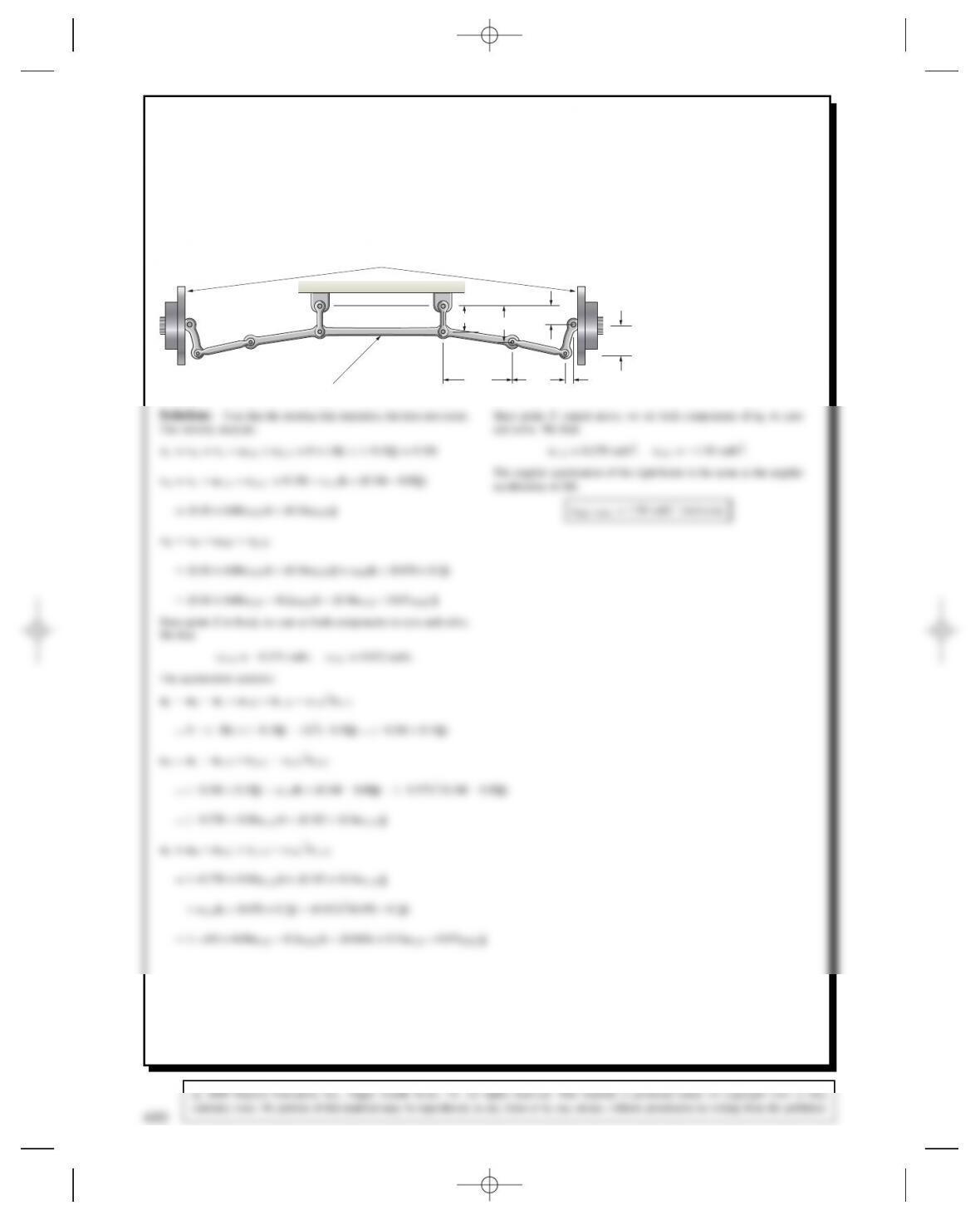
Problem 17.103 The steering linkage of a car is shown.
Member DE rotates about the fixed pin E. The right
brake disk is rigidly attached to member DE. The tie
rod CD is pinned at Cand D. At the instant shown, the
Pitman arm AB has a counterclockwise angular veloc-
ity of 1 rad/s and a clockwise angular acceleration of
2 rad/s2. What is the angular acceleration of the right
brake disk?
180 mm 220 mm
100 mm
460
mm
340
mm
70
mm
200
mm
Steering link
Brake disks
B
A
CD
E
400
Problem 17.104 At the instant shown, bar AB has
no angular velocity but has a counterclockwise angular
acceleration of 10 rad/s2. Determine the acceleration of
point E.
x
y
A
B
CE
D
400 mm
(a) Get the angular velocities ωBC,ωCD. The velocity of point Bis
zero. The velocity of Cin terms of the velocity of Bis
Equate the expressions and separate components: −4000 +
400αBC =0, 700αBC =−400αCD.
Solve: αBC =10 rad/s2,αCD =−17.5 rad/s2, The acceleration
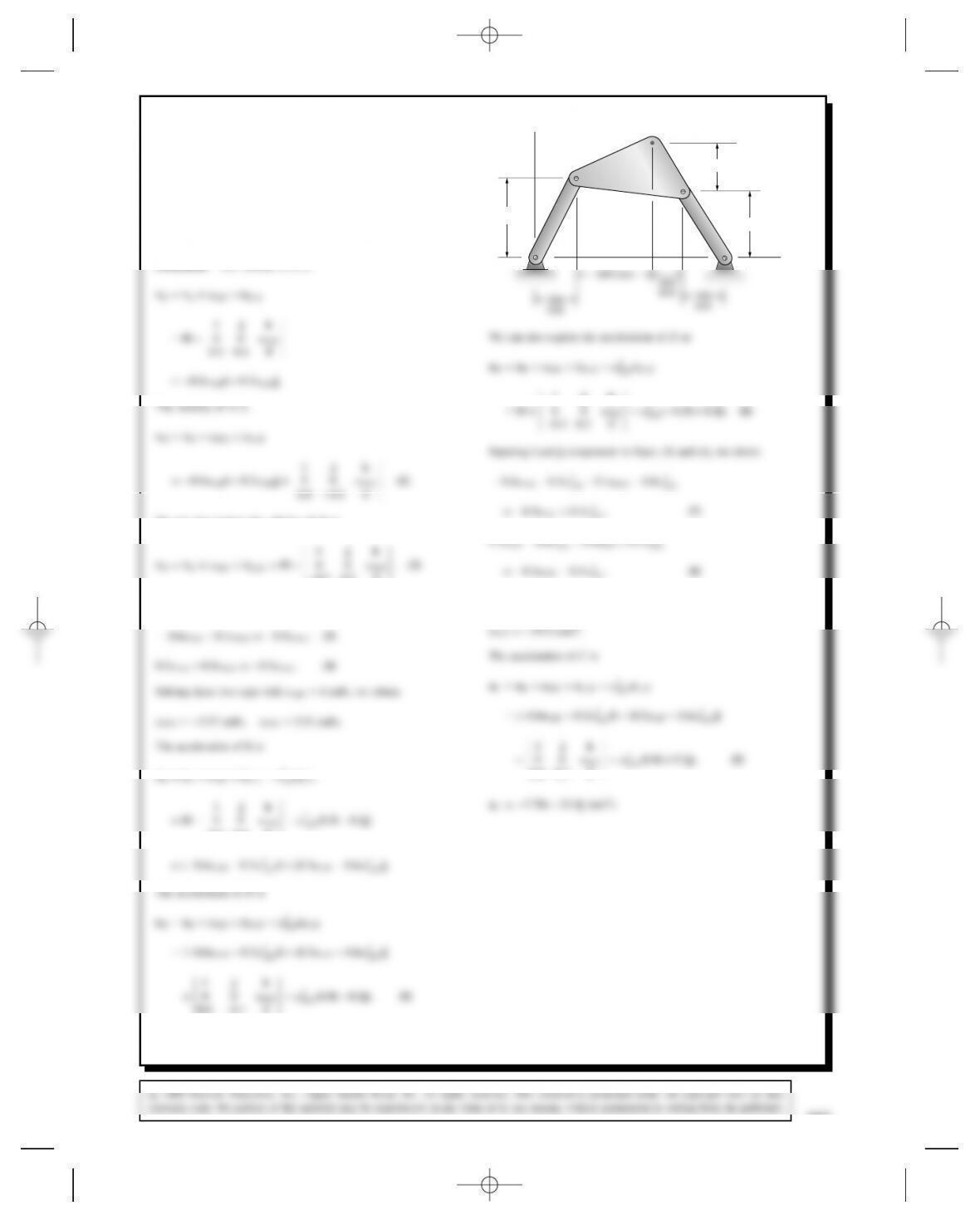
Problem 17.105 If ωAB =12 rad/s and αAB =100
rad/s2, what are the angular accelerations of bars BC
and CD?
C
B
350
mm
200
mm
ω
AB
α
AB
Solution: The vector locations of A,B,Cand Dare: rA=
0, rB=200j(mm), rC=300i+350j(mm), rD=650i(mm). The
5.33 rad/s, ωCD =−4.57 rad/s.
(b) Get the angular accelerations. The acceleration of point Bis
aB=αAB ×rB/A −ω2
AB rB/A =
ij k
0 0 100
402
Problem 17.106 If ωAB =4 rad/s counterclockwise
and αAB =12 rad/s2counterclockwise, what is the
acceleration of point C?
A
B
C
D
Ex
y
600 mm
400 mm
500 mm
200
Solution: The velocity of Bis
Equating iand jcomponents in Eqns. (1) and (2), we obtain
Solving these two eqns with αAB =12 rad/s2, we obtain
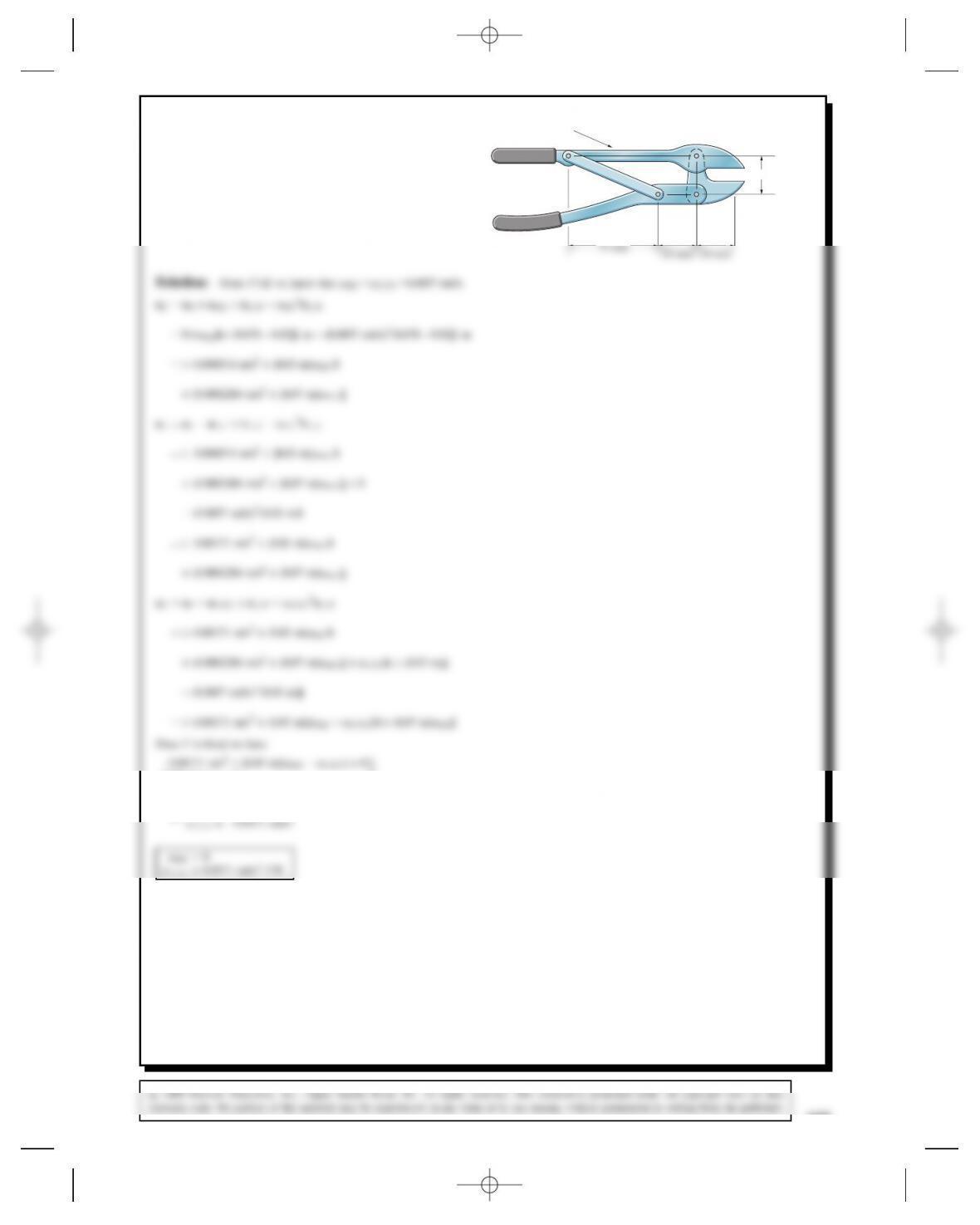
Problem 17.107 The angular velocities and angular
accelerations of the grips of the shears are shown. What
is the resulting angular acceleration of the jaw BD?
0.12 rad/s
0.08 rad/s2
BC
D
E
25 mm
18 mm
25 mm
404
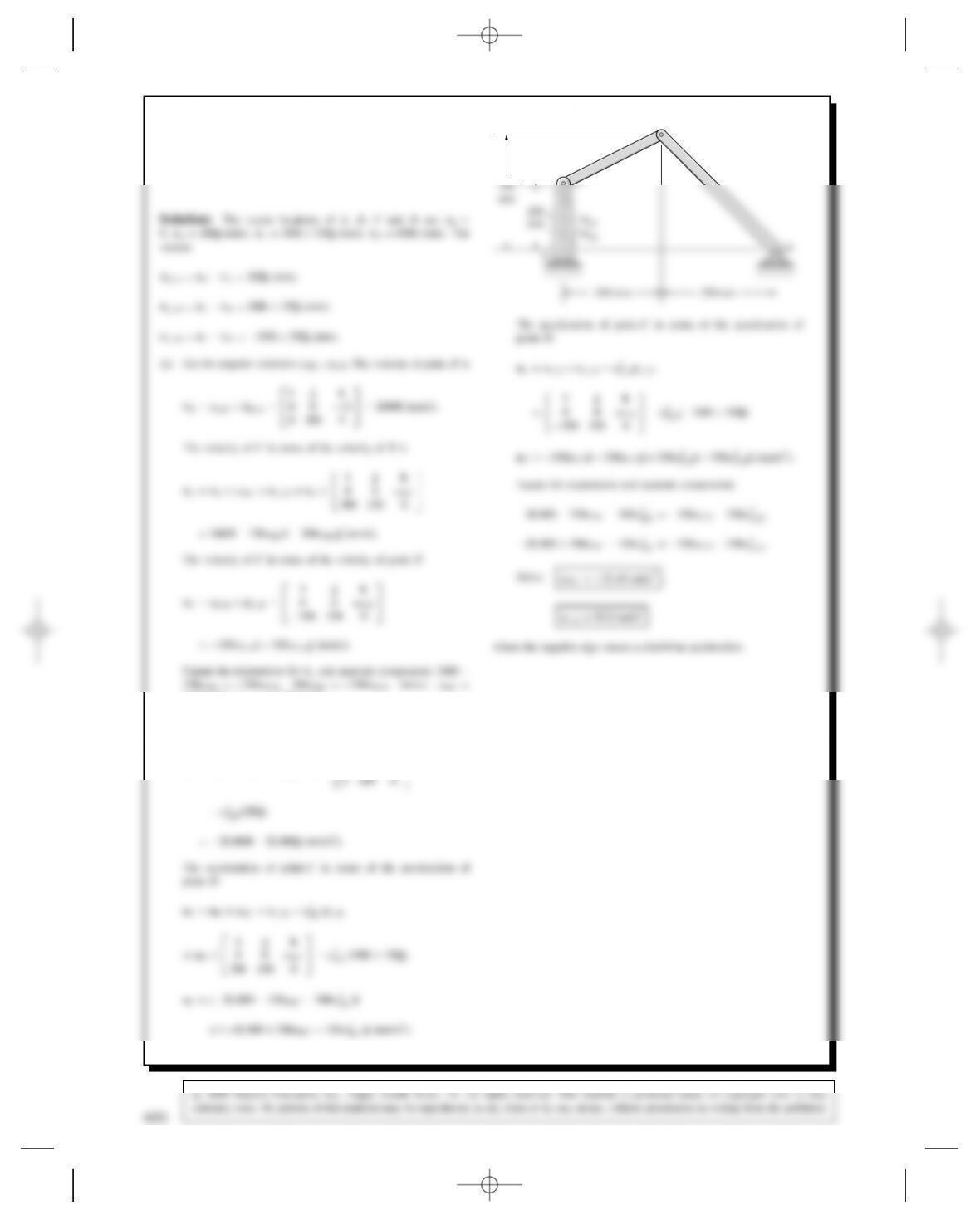
Problem 17.108 If arm AB has a constant clockwise
angular velocity of 0.8 rad/s, arm BC has a constant
angular velocity of 0.2 rad/s, and arm CD remains ver-
tical, what is the acceleration of part D?
y
B
15⬚
300 mm
Problem 17.109 In Problem 17.108, if arm AB has a
constant clockwise angular velocity of 0.8 rad/s and you
want Dto have zero velocity and acceleration, what are
the necessary angular velocities and angular accelera-
tions of arms BC and CD?
y
B
15⬚
300 mm
The velocity of Cin terms of the velocity of Bis
ijk
289.8−77.60
vC=183.9i−154.3j+ωBC(77.6i+289.8j)(mm/s).
Equate the expressions and separate components:
−123.4+77.6αBC −289.8ω2
BC =−170αCD,
−147.1+289.8αBC +77.6ω2
BC =−170ω2
CD.
Solve:
406
Problem 17.110 In Problem 17.108, if you want arm
CD to remain vertical and you want part Dto have
velocity vD=1.0i(m/s) and zero acceleration, what are
the necessary angular velocities and angular accelera-
tions of arms AB and BC ?
y
B
15⬚
300 mm
289.8−77.60
vC=−229.8ωAB i+192.8ωAB j+ωBC(77.6i+289.8j)(mm/s).
for aC, and separate components:
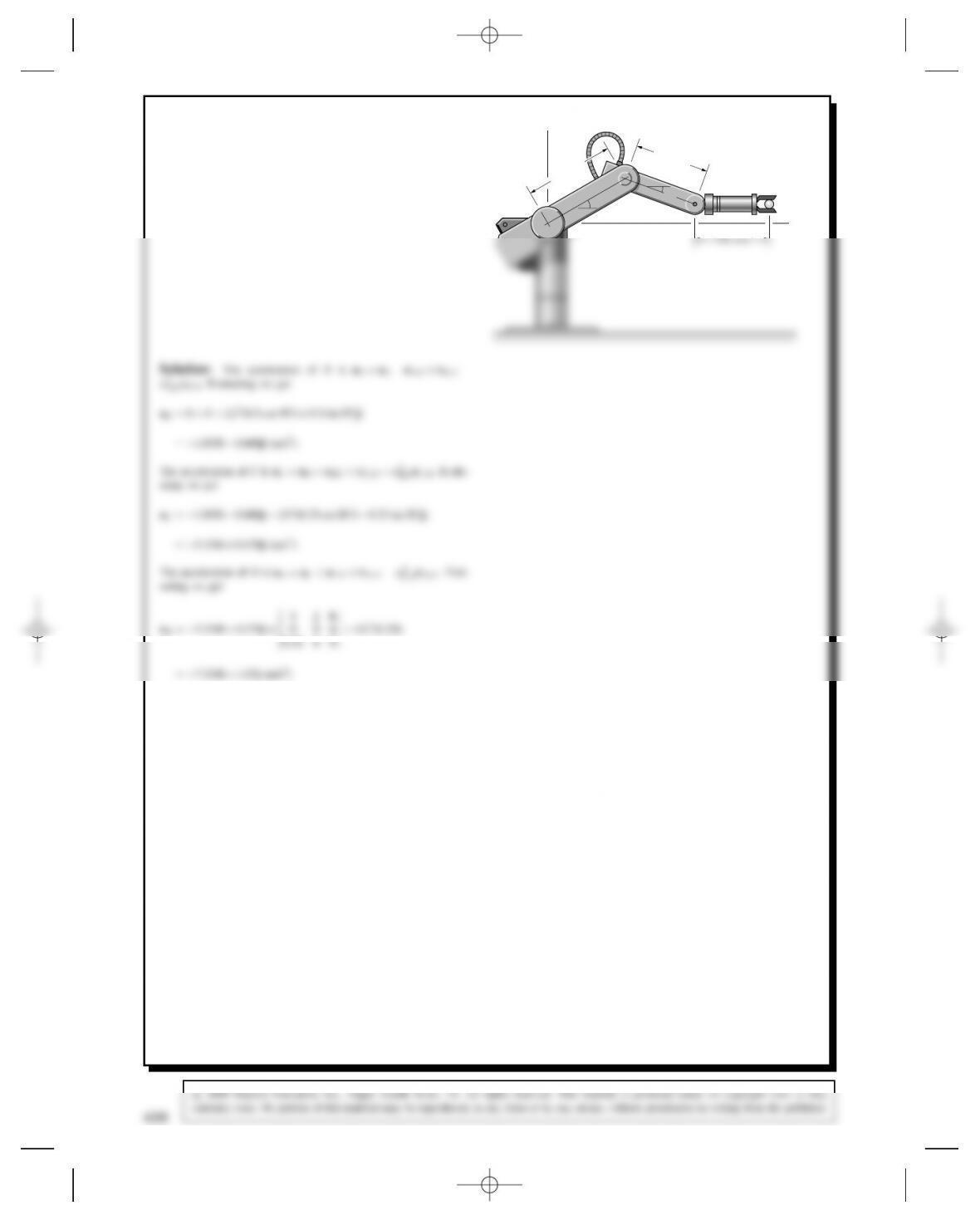
Problem 17.111 Link AB of the robot’s arm is rotat-
ing with a constant counterclockwise angular velocity of
2 rad/s, and link BC is rotating with a constant clock-
wise angular velocity of 3 rad/s. Link CD is rotating
at 4 rad/s in the counterclockwise direction and has a
counterclockwise angular acceleration of 6 rad/s2. What
is the acceleration of point D?
x
D
C
y
B
30°
20°
A
250 mm
300 mm
408
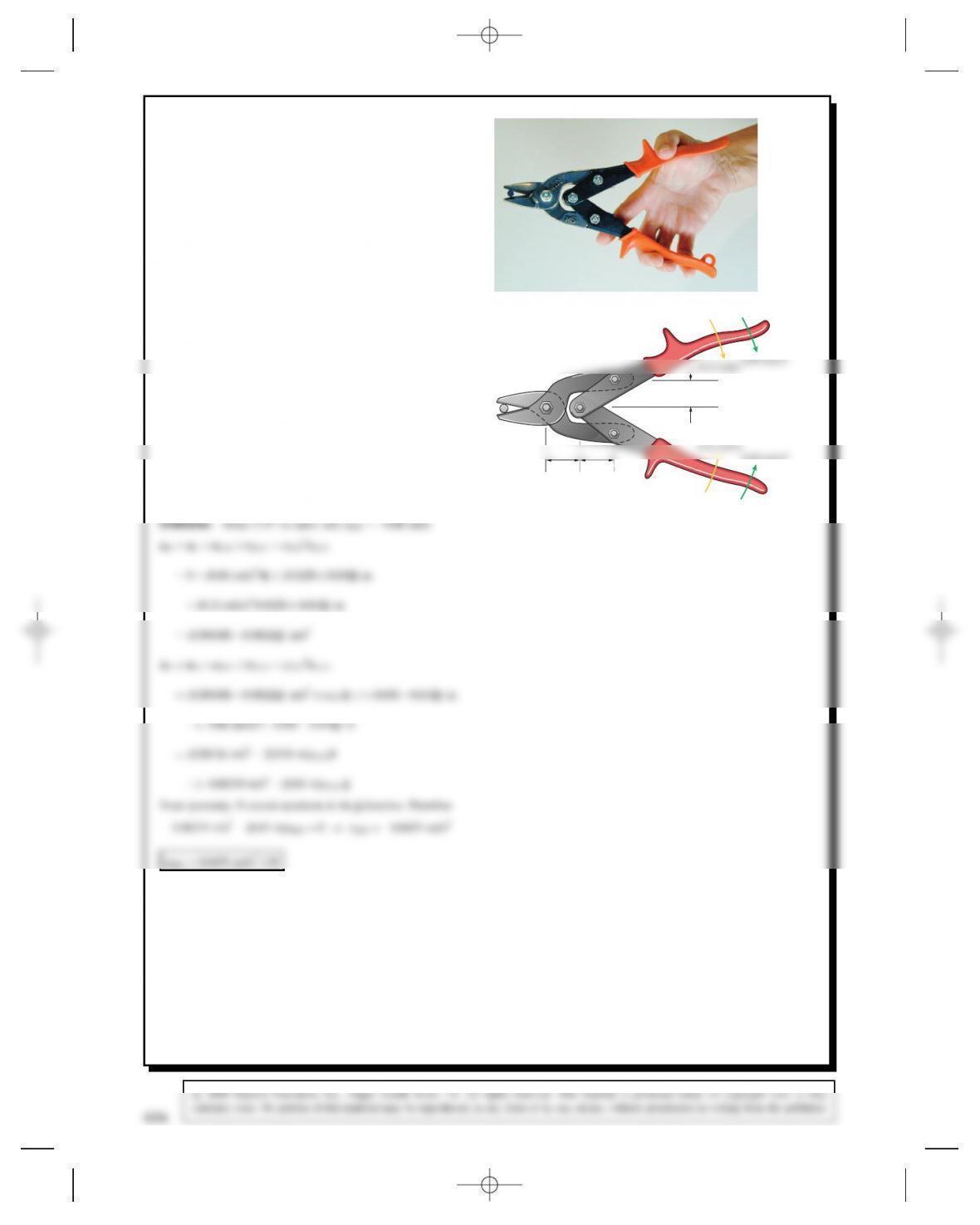
Problem 17.112 The upper grip and jaw of the pliers
ABC is stationary. The lower grip DEF is rotating in
the clockwise direction with a constant angular velocity
of 0.2 rad/s. At the instant shown, what is the angular
acceleration of the lower jaw CFG?G
B
A
D
C
30 mm
EF
Stationary
(0.07 m)αBE =0
⇒αBE =0
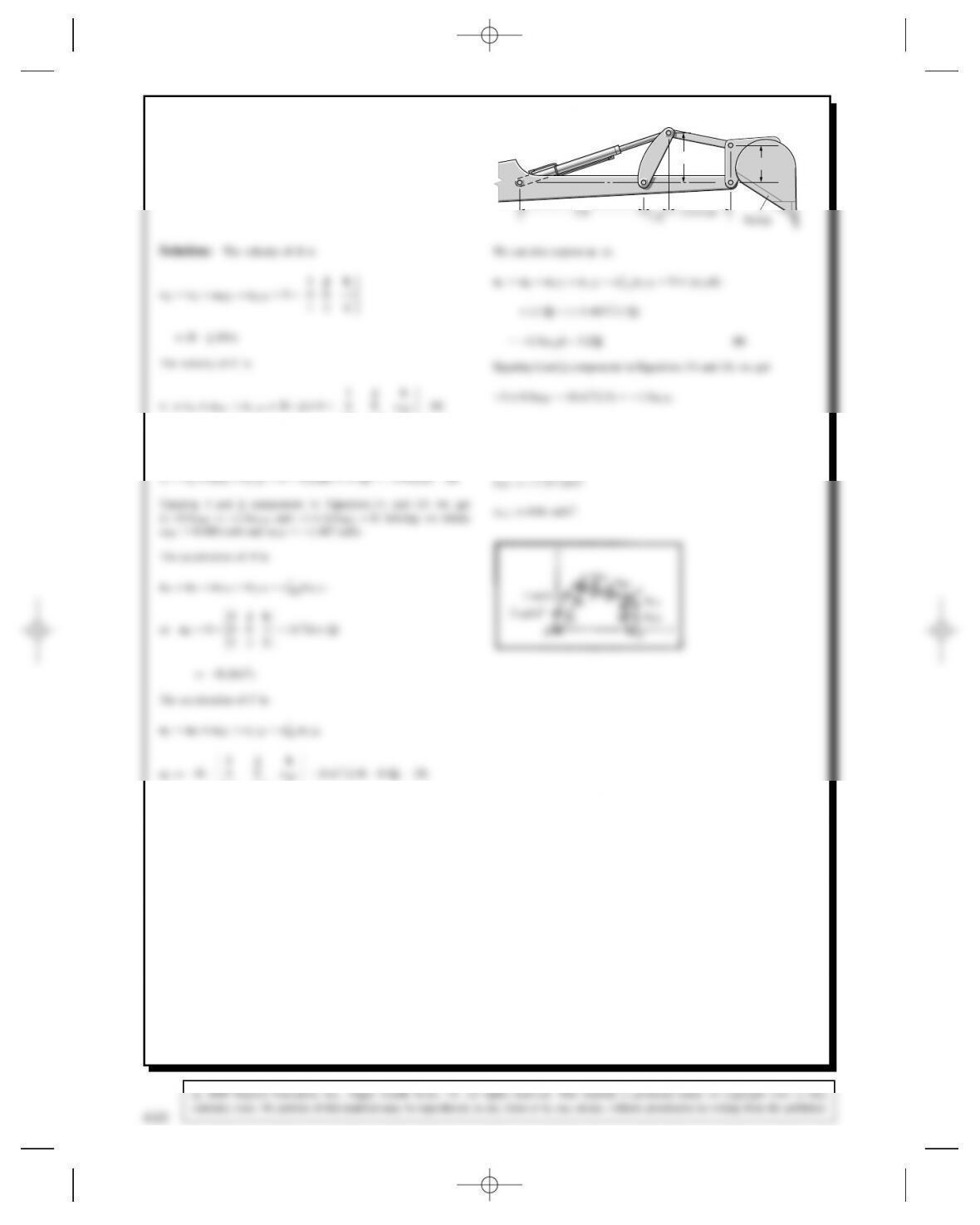
Problem 17.113 The horizontal member ADE sup-
porting the scoop is stationary. If the link BD has a
clockwise angular velocity of 1 rad/s and a counterclock-
wise angular acceleration of 2 rad/s2, what is the angular
acceleration of the scoop?
1 ft 6 in
2 ft
C
B
DE
A
2.5−.50
We can also express vcas
vc=vE+ωCE ×rC/E =0+(ωCEk)×(1.5j)=−1.5ωCEi.(2)
and 2.5αBC +(0.4)2(0.5)=−3.23.
Solving, we obtain
410
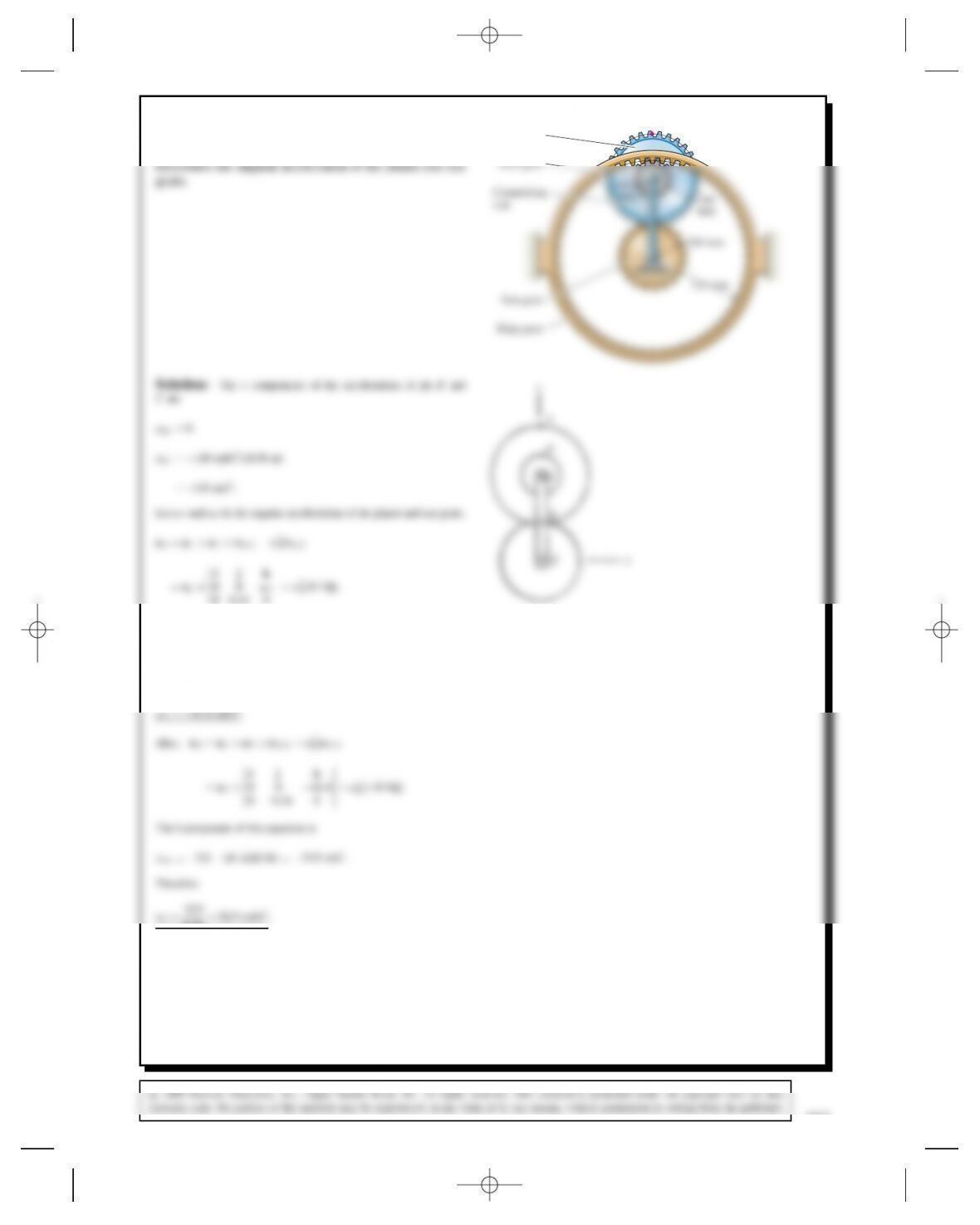
Problem 17.114 The ring gear is fixed, and the hub
and planet gears are bonded together. The connecting rod
has a counterclockwise angular acceleration of 10 rad/s2.
A
Planet gear
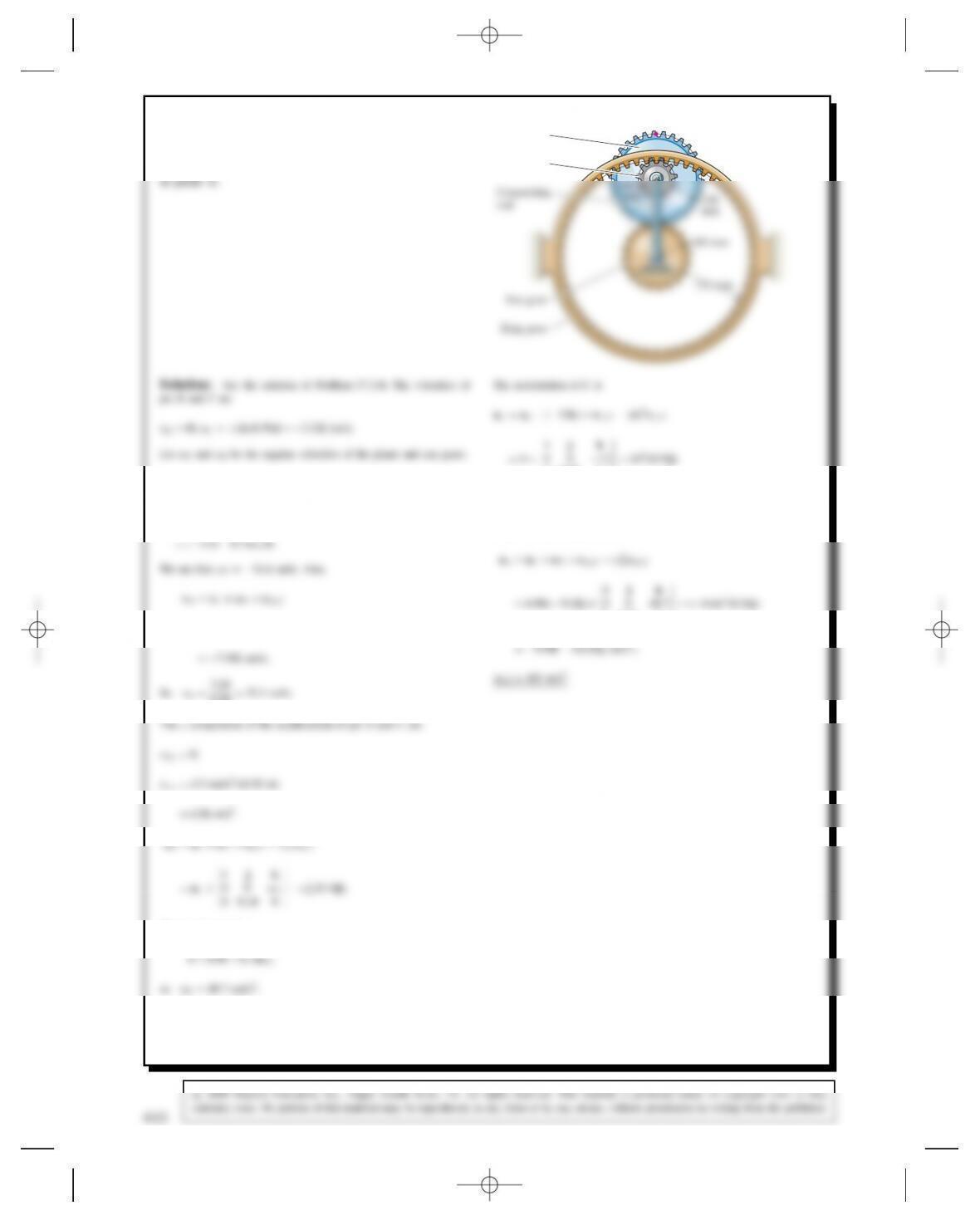
Problem 17.115 The connecting rod in Problem
17.114 has a counterclockwise angular velocity of
4 rad/s and a clockwise angular acceleration of
12 rad/s2. Determine the magnitude of the acceleration
A
Planet gear
Hub gear
vB=vC+ωP×rB/C :
O=−2.32i+(ωPk)×(0.14j)
00.58 0
=6.96i−9.28j(m/s2).
Then the acceleration of Ais
412