
Problem 11.33 The homogenous bar has weight W,
and the spring is unstretched when the bar is vertical
(˛D0).
(a) Use potential energy to show that the bar is in equi-
librium when ˛D0.
(b) Show that the equilibrium position ˛D0 is stable
only if 2kL > W.L
k
α
Solution:
from which
(b) Stability is determined by
Problem 11.34 Suppose that the bar in Problem 11.33
is in equilibrium when ˛D20°.
(a) Show that the spring constant kD0.490 W
L.
(b) Determine whether the equilibrium position is
stable.
(where ˛is in radians.) (b) The condition for stability is
however, the spring force is greater that the gravity force in the neigh-
borhood of ˛D0, the system should remain close to ˛D0, which
will be a position of stable equilibrium. This heuristic argument is
supported as follows: (1) The equilibrium condition
2kL
888
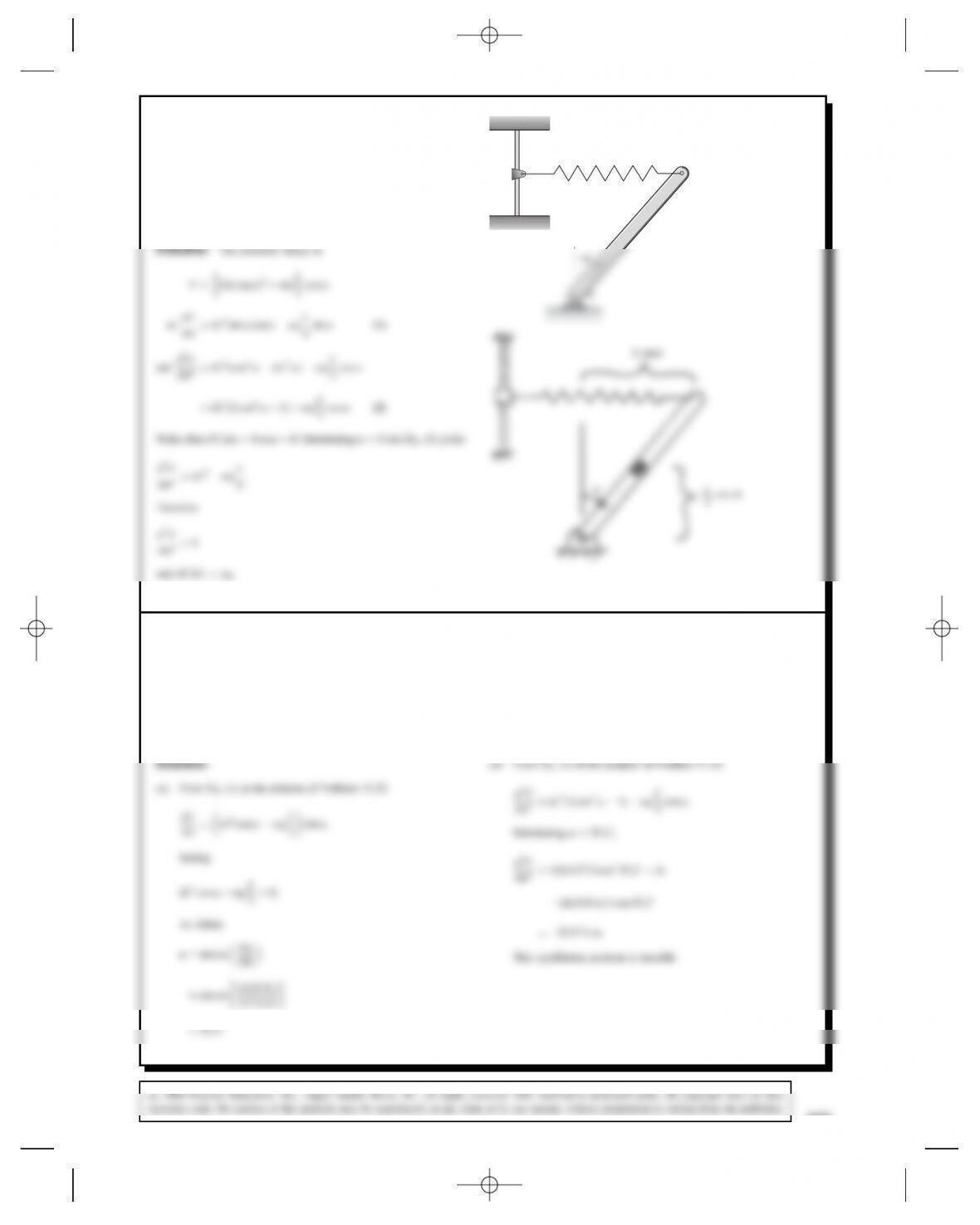
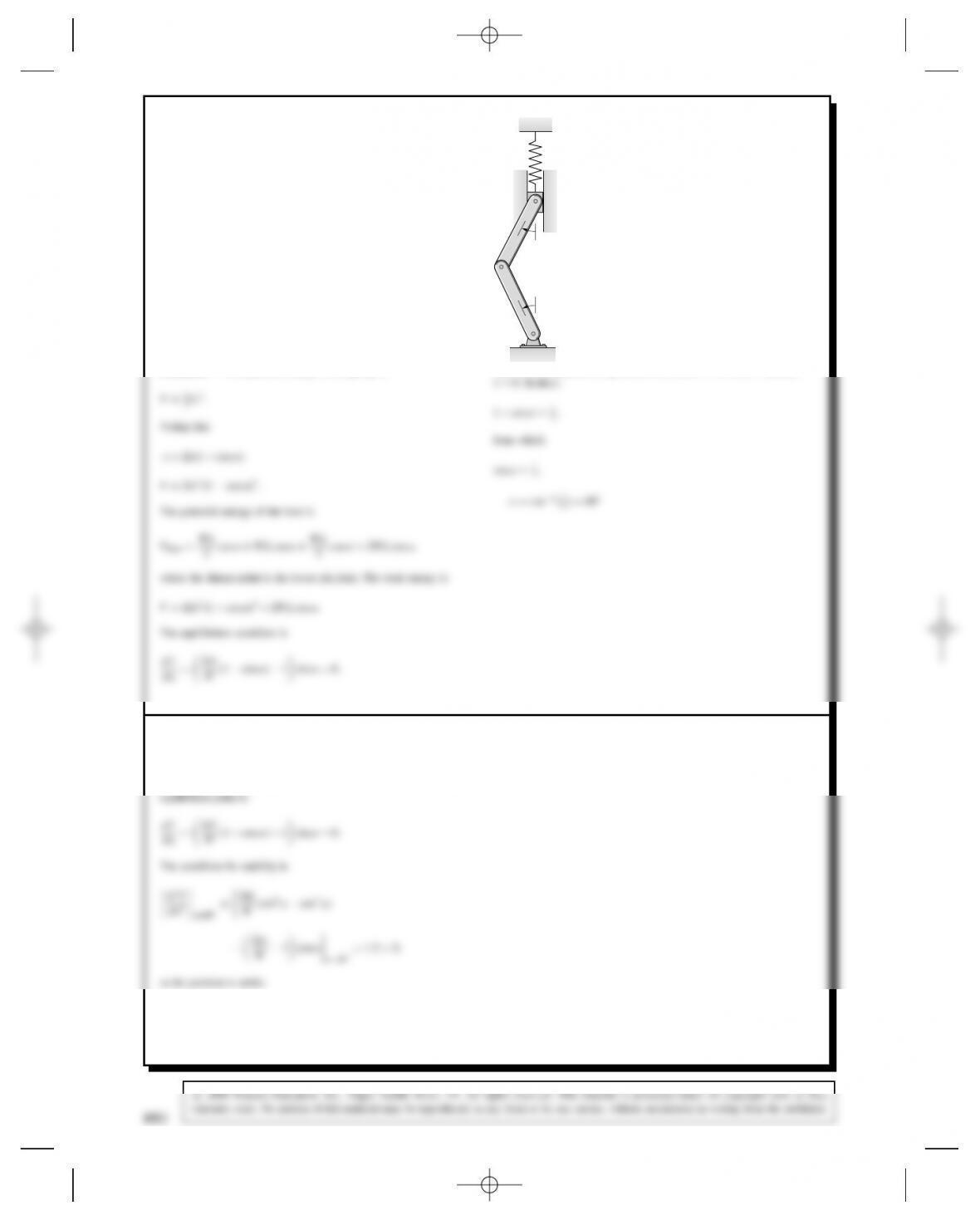
Problem 11.35 The bar AB has mass mand length
L. The spring is unstretched when the bar is vertical
(˛D0). The light collar Cslides on the smooth vertical
bar so that the spring remains horizontal. Show that the
equilibrium position ˛D0 is stable only if 2kL > mg.
CB
k
α
Solution: The potential energy is
VD1
Therefore
d2V
d˛2>0
only if 2kL > mg.
2cos
α
Problem 11.36 The bar AB in Problem 11.35 has mass
mD4 kg, length 2 m, and the spring constant is kD
12 N/m.
(a) Determine the value of ˛in the range 0 <˛<90°
for which the bar is in equilibrium.
(b) Is the equilibrium position determined in part (a)
stable?
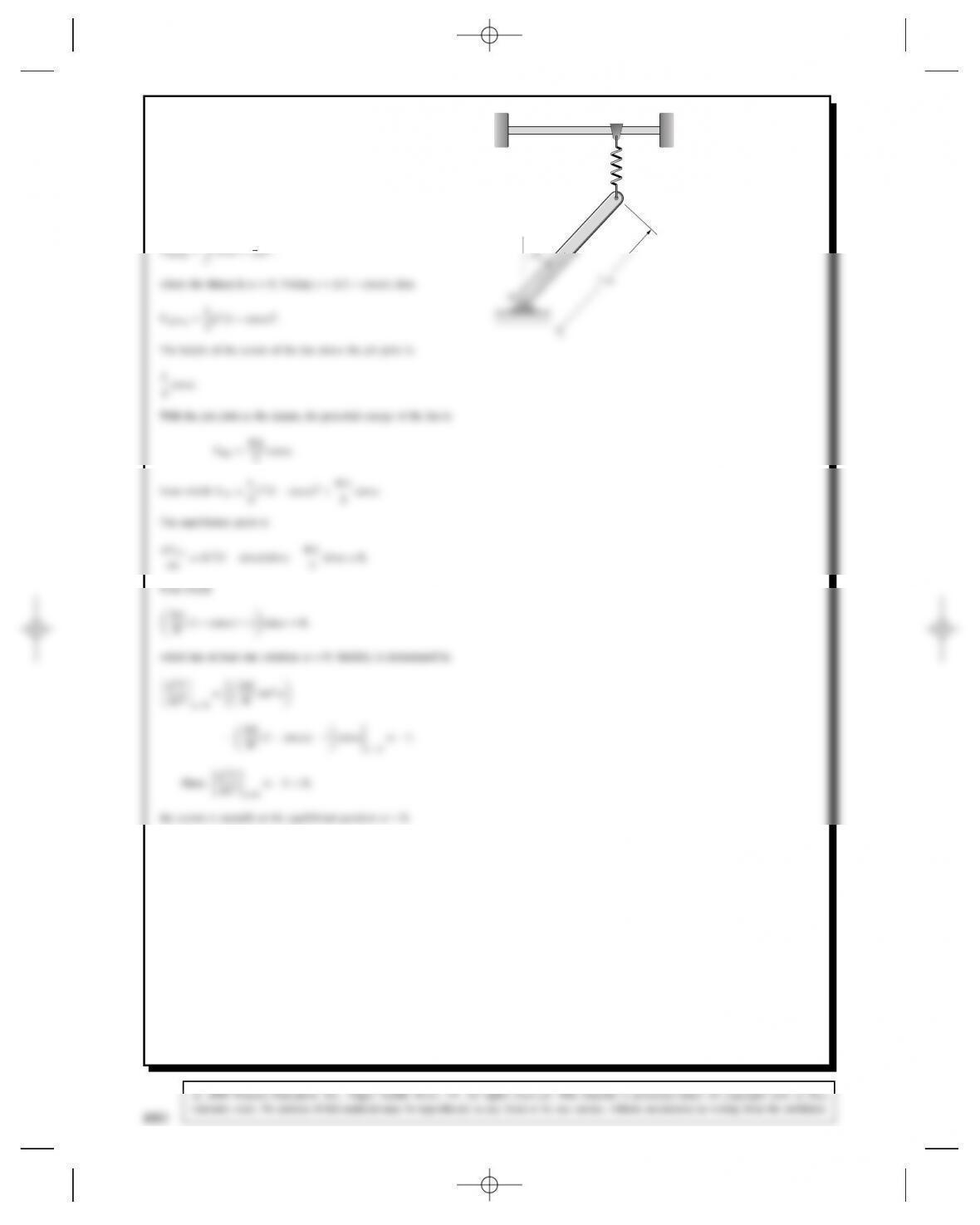
Problem 11.37 The bar AB has weight Wand length
L. The spring is unstretched when the bar is vertical (˛D
0). The light collar Cslides on the smooth horizontal
bar so that the spring remains vertical. Show that the
equilibrium position ˛D0 is unstable. B
C
k
Solution: The potential energy of the spring is
890
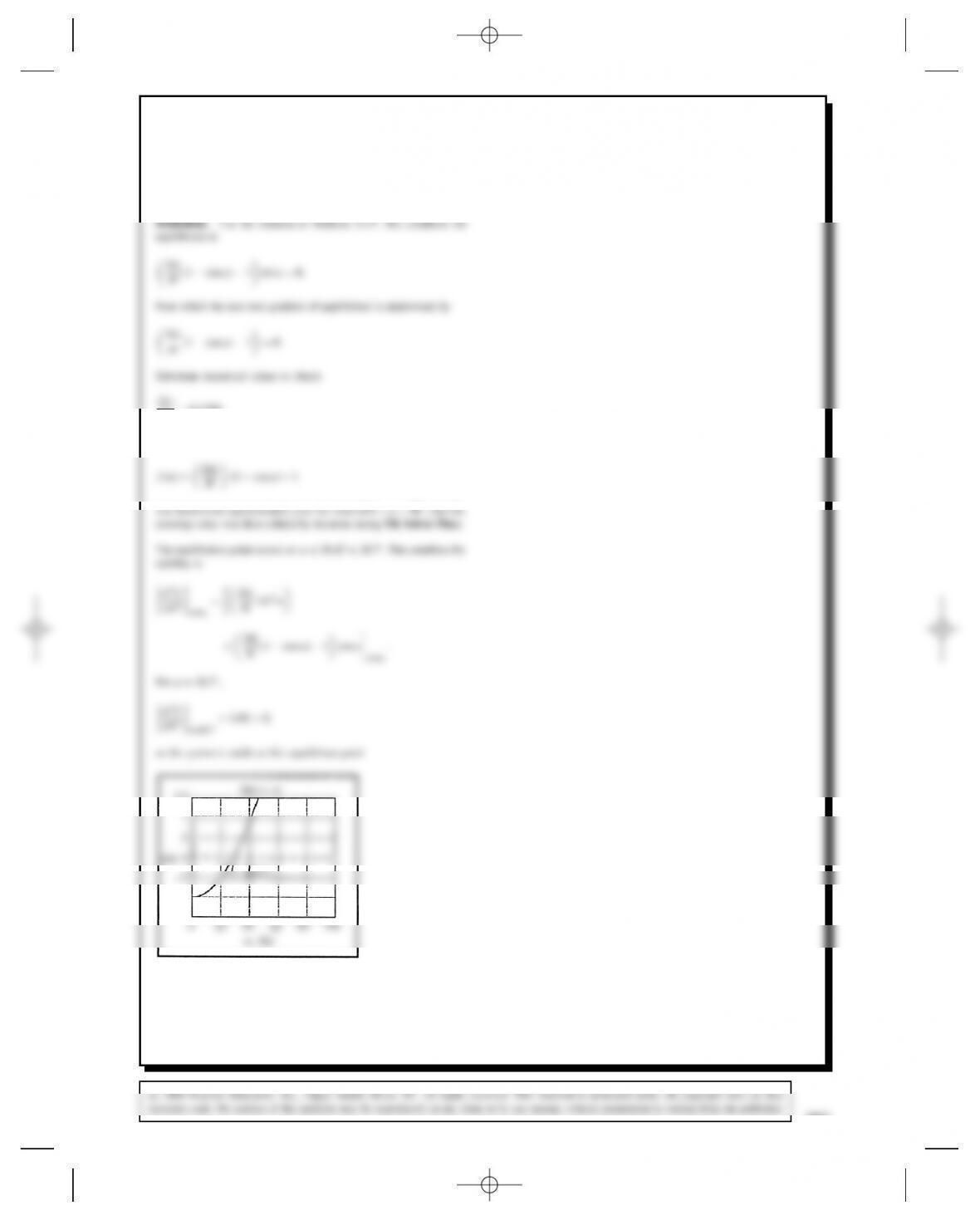
Problem 11.38 The bar AB described in Problem 11.37
has a mass of 2 kg, and the spring constant is kD80 N/m.
(a) Determine the value of ˛in the range 0 <˛<90°
for which the bar is in equilibrium.
(b) Is the equilibrium position determined in (a) stable?
WD8.1549.
The zero crossing of a graph of
Problem 11.39 Each homogenous bar is of mass m
and length L. The spring is unstretched when ˛D0. If
mg DkL, determine the value of ˛in the range 0 <˛<
90°for which the system is in equilibrium.
k
α
α
Solution: The potential energy of the spring is
The non zero position of equilibrium is, when WDkL,2⊲1cos ˛⊳
Problem 11.40 Determine whether the equilibrium
position found in Problem 11.39 is stable or unstable.
Solution: Use the solution to Problem 11.39. The condition for an
892
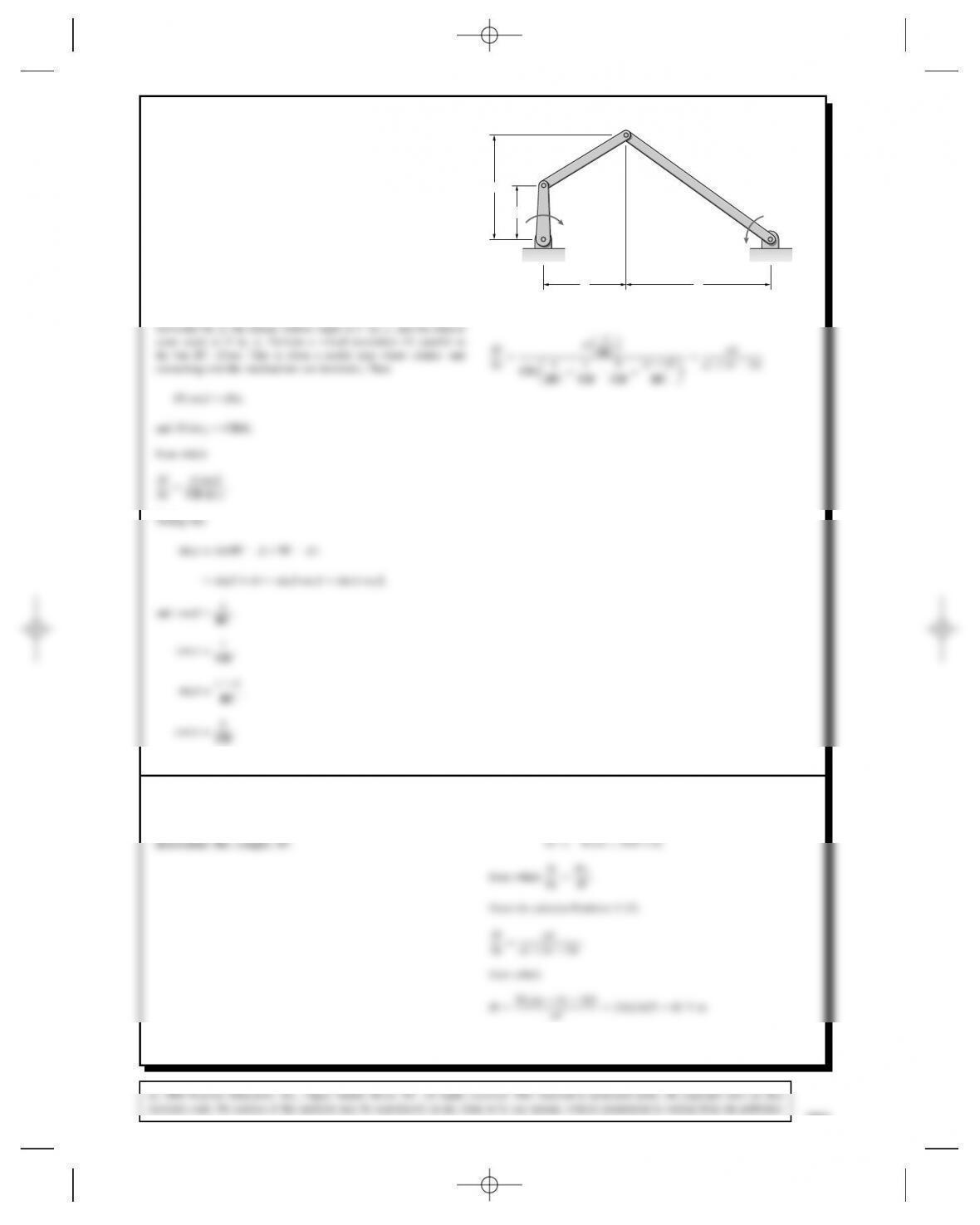
Problem 11.41 The pinned bars are held in place by
the linear spring. Each bar has weight Wand length
L. The spring is unstretched when ˛D90°. Determine
the value of ˛in the range 0 <˛<90°for which the
system is in equilibrium. (See Example 11.5.)
k
L
aa
Solution: The potential energy is
Problem 11.42 Determine whether the equilibrium
position found in Problem 11.41 is stable or unstable.
(See Example 11.5.)
Solution: See 11.41
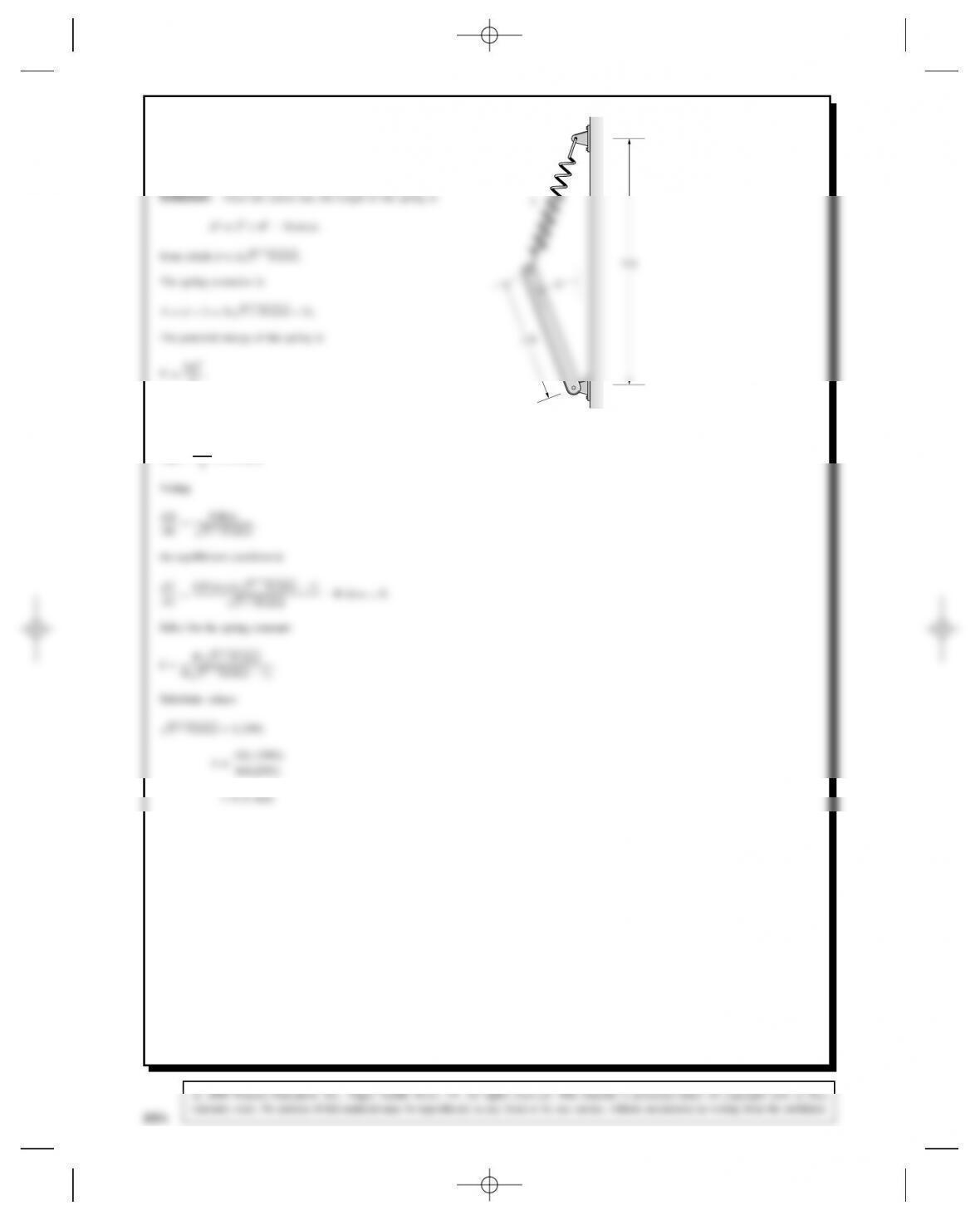
Problem 11.43 The bar weighs 15 lb. The spring is
unstretched when ˛D0. The bar is in equilibrium when
˛D30°. Determine the spring constant k.
4 ft
k
α
Solution: From the cosine law, the length of the spring is
d2D22C4216 cos ˛,
from which dD2p54 cos ˛.
The spring extension is
Dd2D2⊲p54 cos ˛1⊳.
2.
The potential energy of the bar is Vbar DWcos ˛. The total potential
energy is
Vtot Dk2
894
Problem 11.44 Determine whether the equilibrium
positions of the bar in Problem 11.43 are stable or
unstable.
Solution: Use the solution to Problem 11.43. The condition for
equilibrium is
dV
p54 cos ˛Wsin ˛D0.
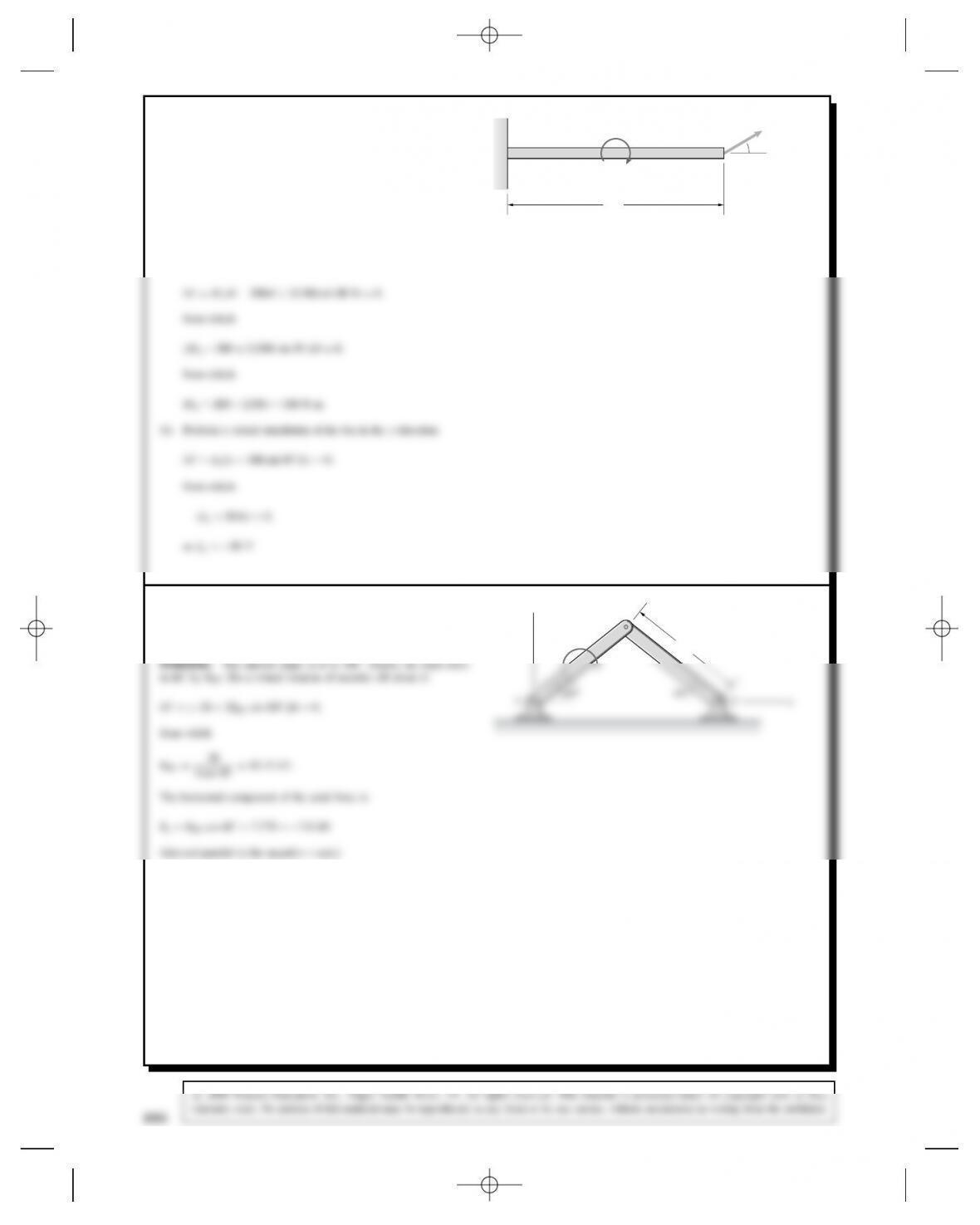
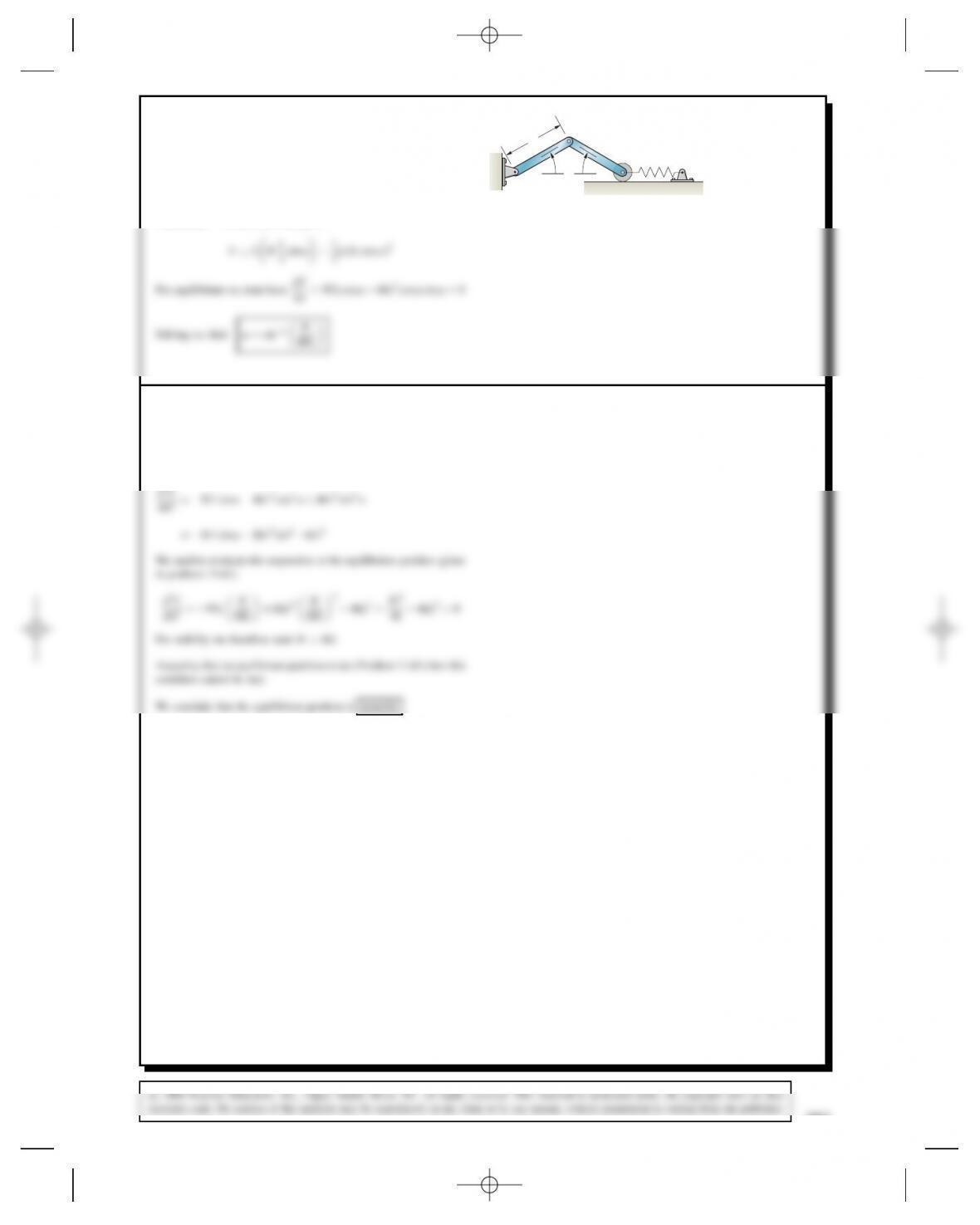
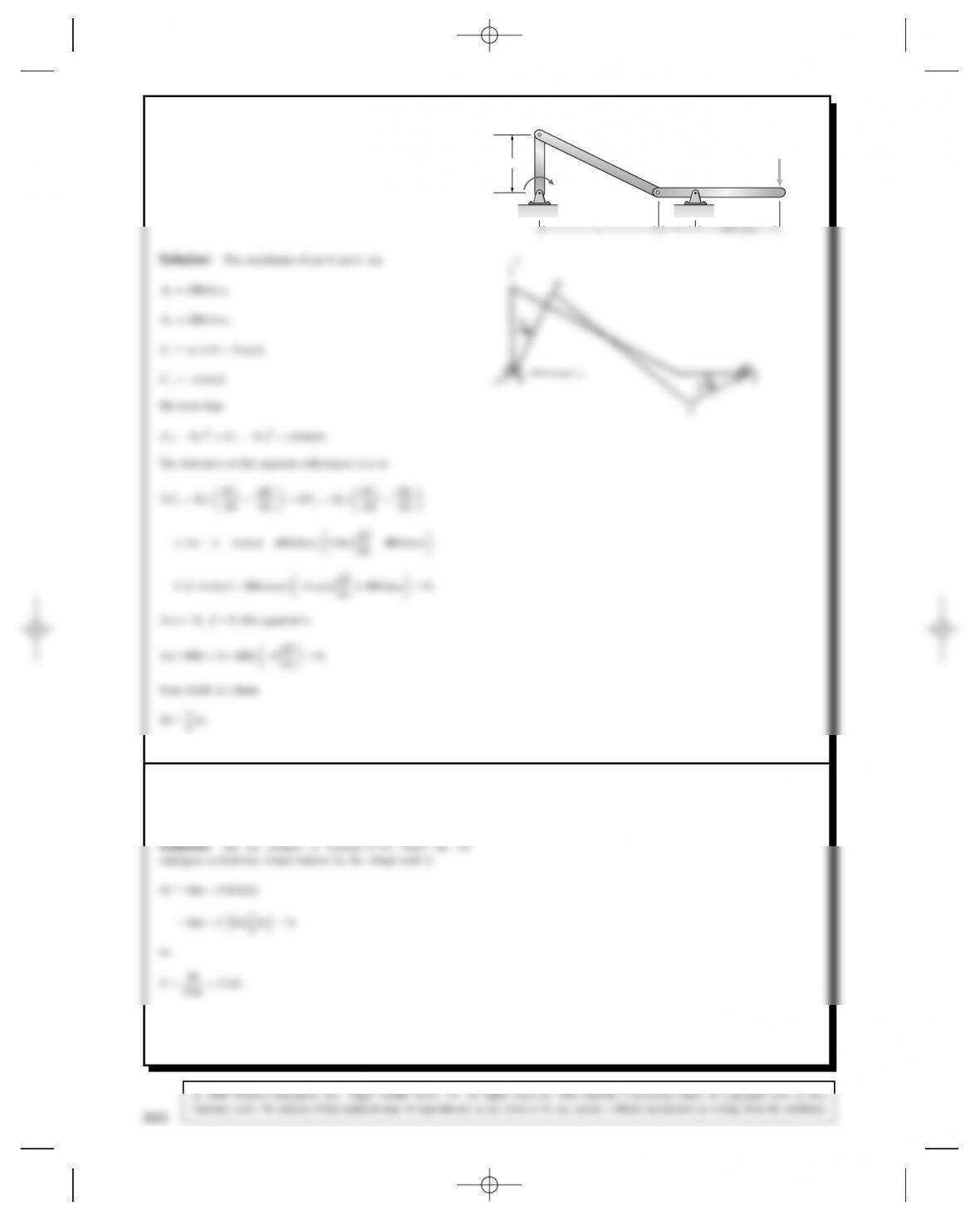
Problem 11.45
(a) Determine the couple exerted on the beam at A.
(b) Determine the vertical force exerted on the beam
at A.
100 N
2 m
A30°
200 N-m
Solution:
(a) Perform a virtual rotation about A:
Problem 11.46 The structure is subjected to a 20 kN-
m couple. Determine the horizontal reaction at C.B
20 kN-m
y
2 m
896
Problem 11.47 The “rack and pinion” mechanism is
used to exert a vertical force on a sample at Afor a
stamping operation. If a force FD30 lb is exerted on
8 in
F
A
Solution: Perform a virtual rotation of the handle. The virtual work
is υU D8Fυ CAυx D0, from which
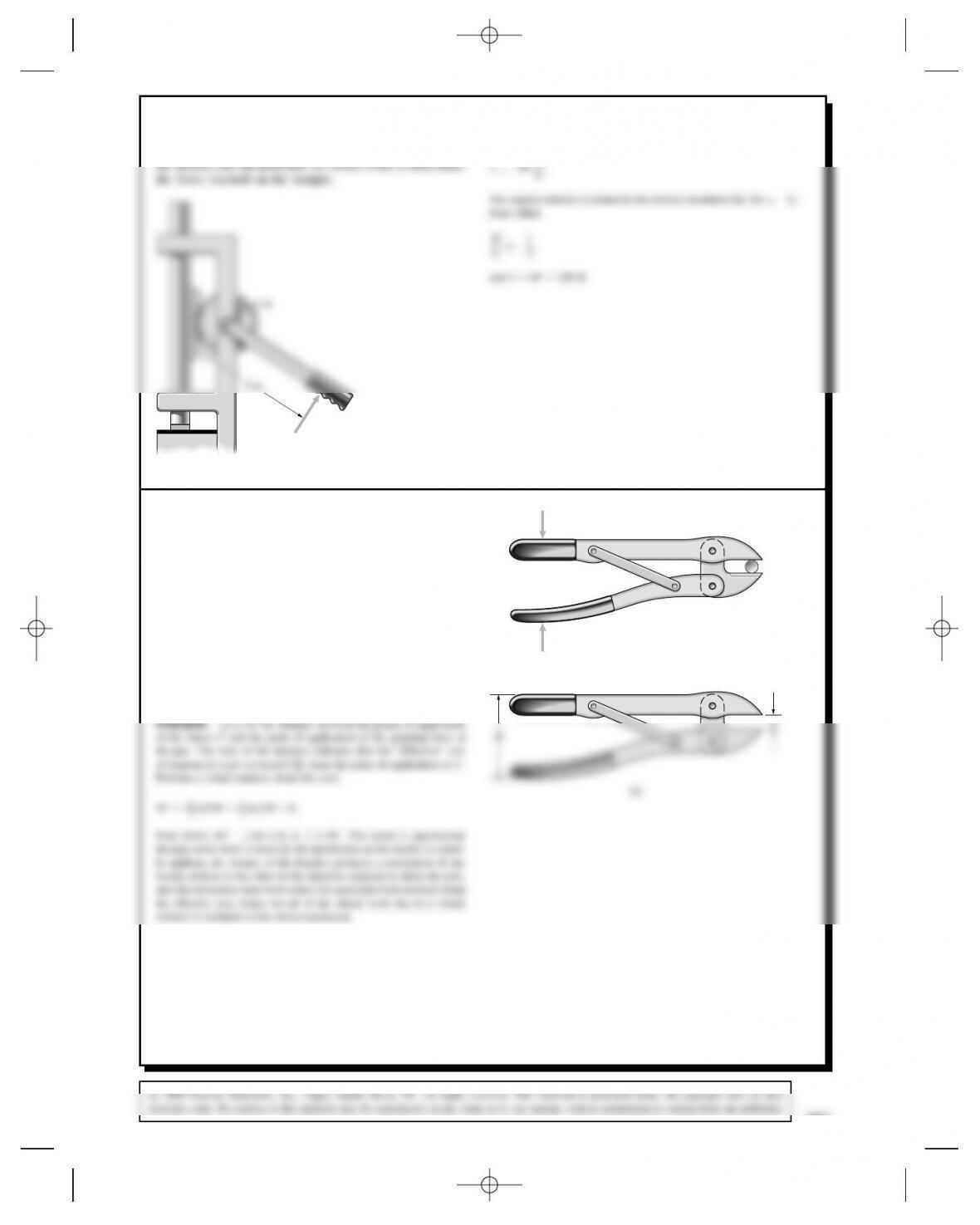
Problem 11.48 If you were assigned to calculate the
force exerted on the bolt by the pliers when the grips
are subjected to forces Fas shown in Fig. a, you
could carefully measure the dimensions, draw free-body
diagrams, and use the equilibrium equations. But another
approach would be to measure the change in the distance
between the jaws when the distance between the handles
is changed by a small amount. If your measurements
indicate that the distance din Fig. b decreases by 1 mm
when Dis decreased 8 mm, what is the approximate
value of the force exerted on the bolt by each jaw when
the forces Fare applied?
F
F
(a)
d
Solution: Let Lbe the distance between the points of application
Problem 11.49 The system is in equilibrium. The total
weight of the suspended load and assembly Ais 300 lb.
(a) By using equilibrium, determine the force F.
(b) Using the result of (a) and the principle of virtual
work, determine the distance the suspended load
rises if the cable is pulled downward 1 ft at B.
F
B
Solution:
(a) Isolate the assembly A. The sum of the forces:
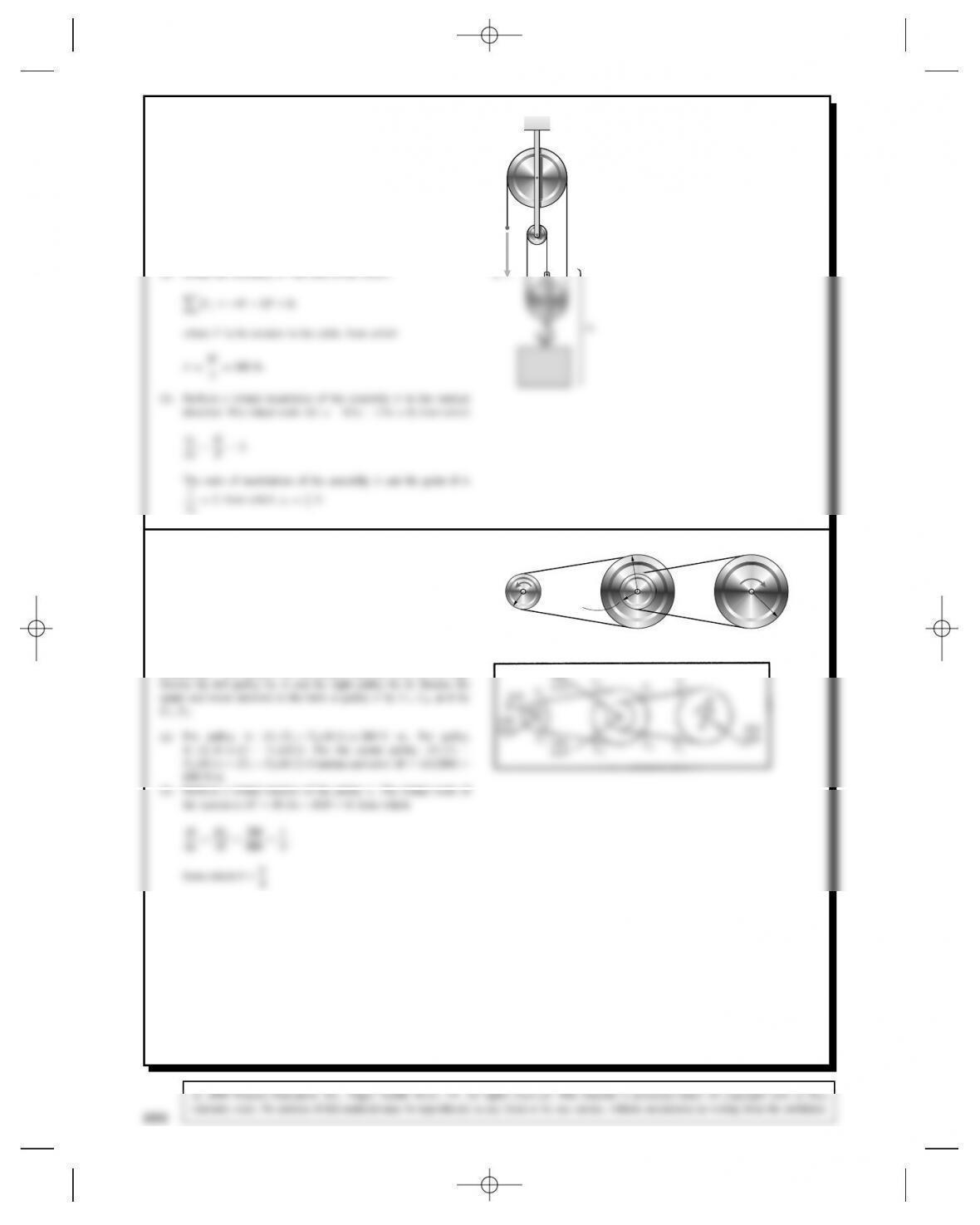
Problem 11.50 The system is in equilibrium.
(a) By drawing free-body diagrams and using
equilibrium equations, determine the couple M.
(b) Using the result of (a) and the principle of virtual
work, determine the angle through which pulley B
rotates if pulley Arotates through an angle ˛.
100 mm
A
B
M
200
N-m
100
mm
200 mm
200
mm
Solution: The pulleys are frictionless and the belts do not slip.
200
898
Problem 11.51 The mechanism is in equilibrium.
Neglect friction between the horizontal bar and the
collar. Determine Min terms of F,˛, and L.
M
L
F
α
2L
From the dimensions given and the cosine law, 4L2Dx2CL2
2Lx cos ˛, from which x22xL cos ˛3L2D0, which has the
solution
xDLcos ˛špL2cos2˛C3L2DL⊲cos ˛špcos2˛C3⊳.
Since a negative value of xhas no meaning here,
xDL⊲cos ˛Cpcos2˛C3⊳.
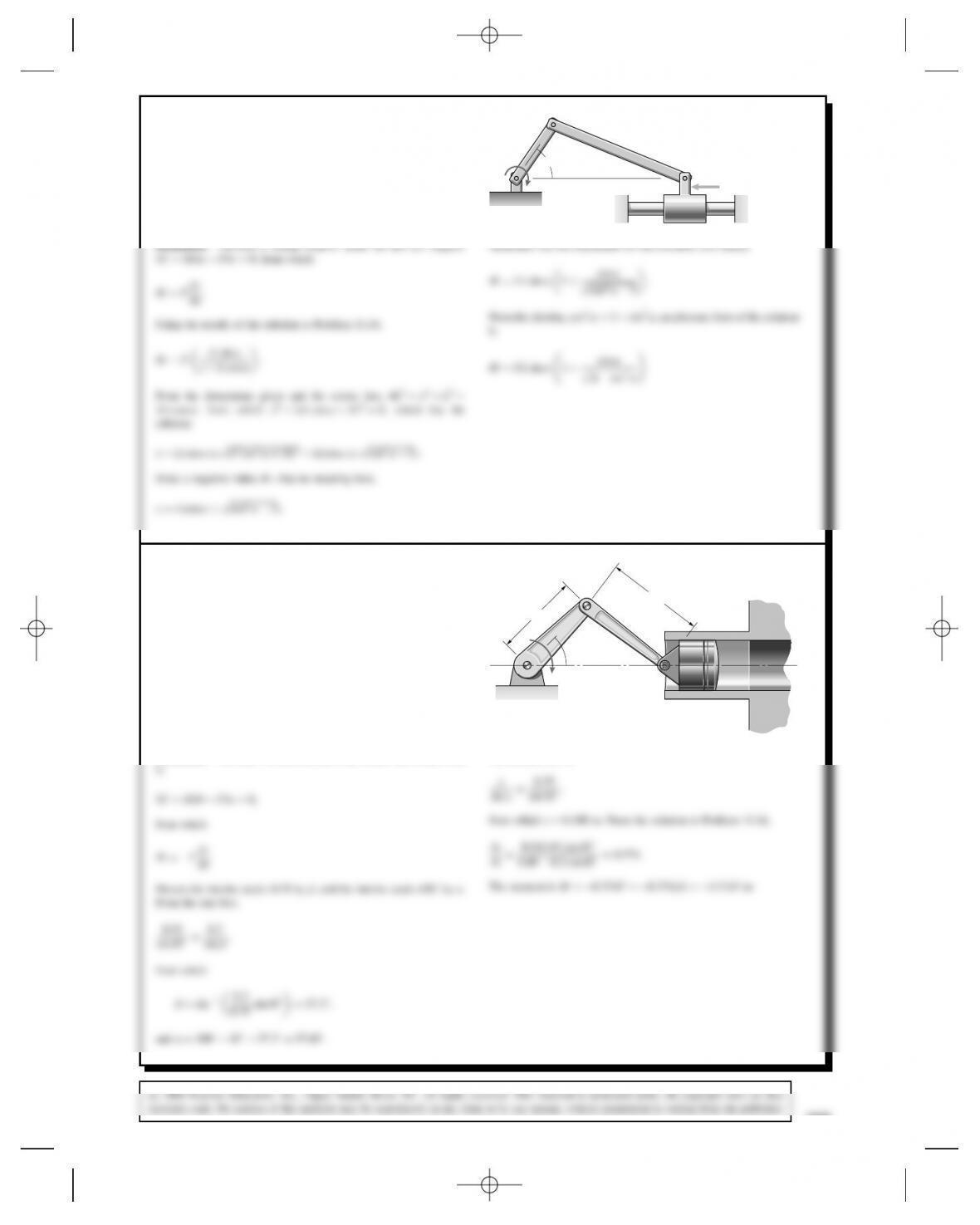
Problem 11.52 In an injection casting machine, a
couple Mapplied to arm AB exerts a force on
the injection piston at C. Given that the horizontal
component of the force exerted at Cis 4 kN, use the
principle of virtual work to determine M.
M
350 mm
300 mm
C
B
A45°
Solution: Perform a virtual rotation of the crank. The virtual work
The distance AC is
Problem 11.53 Show that if bar AB is subjected to
a clockwise virtual rotation υ˛, bar CD undergoes a
counterclockwise virtual rotation ⊲b/a⊳υ˛.
A
B
C
400 mm
6 kN-m
F
D
⊲CxBx⊳2C⊲CyBy⊳2Dconstant.
The derivative of this equation with respect to ˛is
2⊲CxBx⊳dCx
d˛ dBx
d˛ C2⊲CyBy⊳dCy
d˛ dBy
d˛
D2⊲a Cbbcos ˇ400 sin ˛⊳ bsin ˇdˇ
d˛ 400 cos ˛
C2⊲bsin ˇ400 cos ˛⊳ bcos ˇdˇ
d˛ C400 sin ˛D0.
At ˛D0,ˇD0, this equation is
2a⊲400⊳C2⊲400⊳bdˇ
d˛ D0,
from which we obtain
υˇ Da
bυ˛.
Problem 11.54 The system in Problem 11.53 is in
equilibrium, aD800 mm, and bD400 mm. Use the
principle of virtual work to determine the force F.
900
Problem 11.55 Show that if bar AB is subjected to
a clockwise virtual rotation υ˛, bar CD undergoes a
clockwise virtual rotation [ad/⊲ac Cbc bd⊳]υ˛.
c
d
ab
A
B
C
D
24 N-m
M
Solution: Denote the interior acute angle formed by BC with the
Substitute:
Problem 11.56 The system in Problem 11.55 is in
equilibrium, aD300 mm, bD350 mm, cD350 mm,
and dD200 mm. Use the principle of virtual work to
Solution: Perform a virtual rotation of the crank at A. The virtual
work is
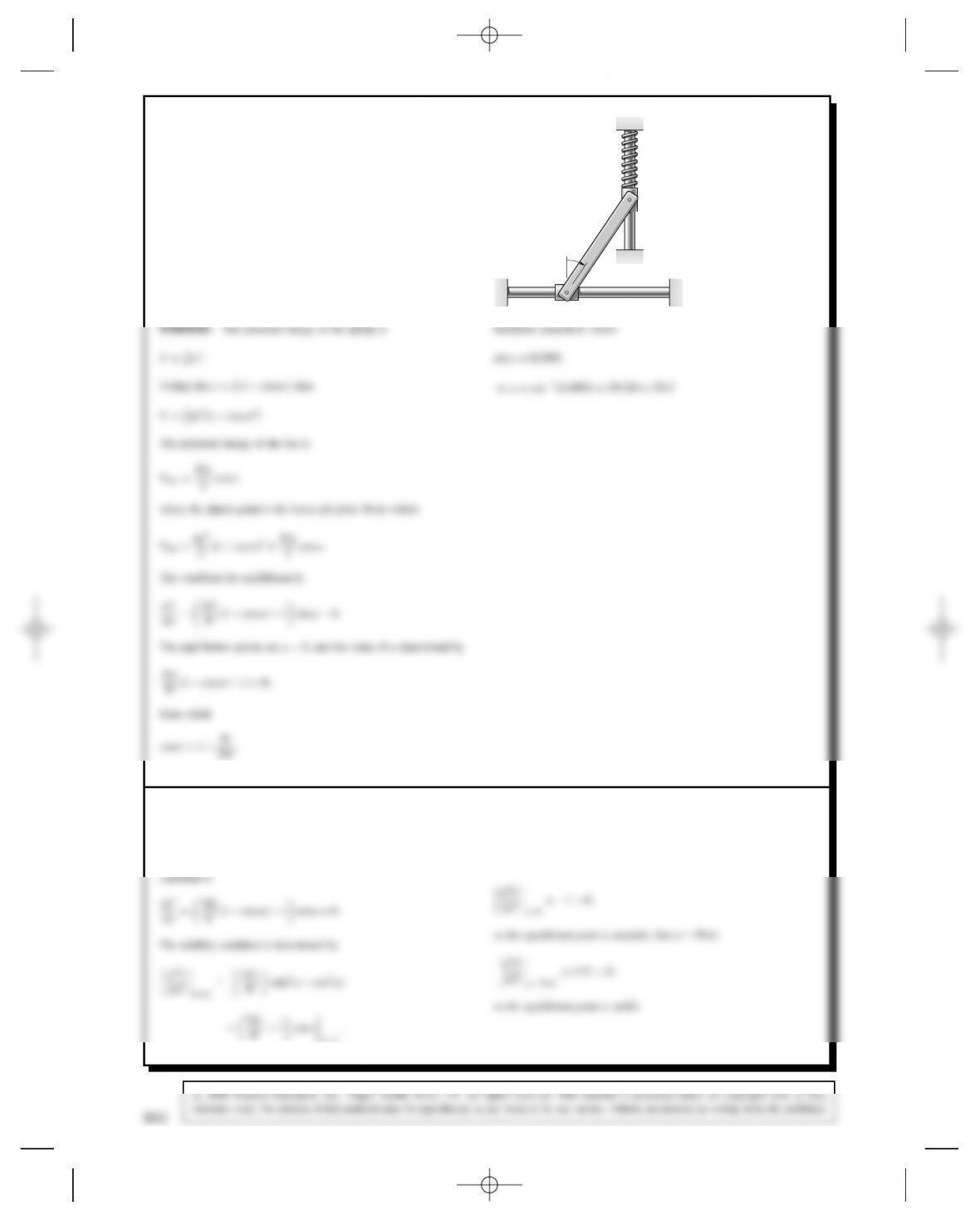
Problem 11.57 The mass of the bar is 10 kg, and it is
1 m in length. Neglect the masses of the two collars. The
spring is unstretched when the bar is vertical (˛D0),
and the spring constant is kD100 N/m. Determine the
values of ˛at which the bar is in equilibrium.
k
α
VD1
2kL2⊲1cos ˛⊳2.
The potential energy of the bar is
Vbar DWL
2cos ˛,
where the datum point is the lower pin joint. From which
Vtot DkL2
2⊲1cos ˛⊳2CWL
2cos ˛.
The condition for equilibrium is
dV
d˛ D2kL
W⊲1cos ˛⊳ 1sin ˛D0.
The equilibrium points are ˛D0, and the value of ˛determined by
2kL
W⊲1cos ˛⊳ 1D0,
from which
cos ˛D1W
2kL .
Problem 11.58 Determine whether the equilibrium
positions of the bar in Problem 11.57 are stable or
unstable.
Solution: Use the solution to Problem 11.57. The equilibrium
For ˛D0,
902
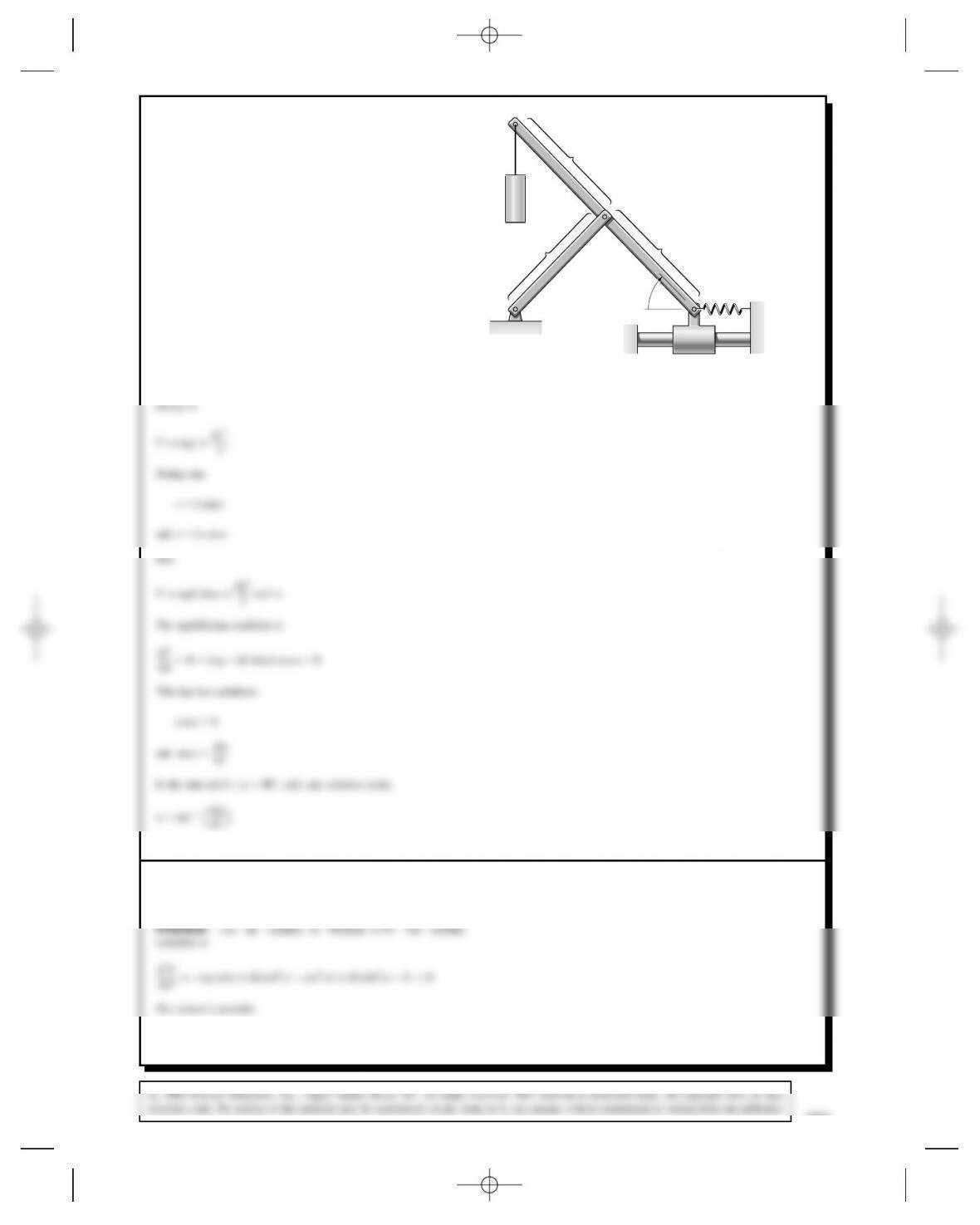
Problem 11.59 The spring is unstretched when ˛D
90°. Determine the value of ˛in the range 0 <˛<90°
for which the system is in equilibrium. 1
_
2L
1
_
2L1
_
2L
m
k
α
Solution: Choose a coordinate system such that the equilibrium
position of the spring occurs at xD0 and at yDL. The potential
Problem 11.60 Determine whether the equilibrium
position found in Problem 11.59 is stable or unstable.

Problem 11.61 The hydraulic cylinder Cexerts a
horizontal force at A, raising the weight W. Determine
the magnitude of the force the hydraulic cylinder must
exert to support the weight in terms of Wand ˛.
1
W
AC
α
α
so
904

Problem 11.62 The homogenous composite object
consists of a hemisphere and a cone. It is at rest on
the plane surface. Show that this equilibrium position is
stable only if h<p3R.
h
R
8.
The location of the mass centroid of the composite is
R2h
3h
4CRC2
3R35R
8
h
3h
4CRC5
12 R2