
Solutions — Chapter 2
2.1.1. Commutativity of Addition:
(x+ i y) + (u+ i v) = (x+u) + i (y+v) = (u+ i v) + (x+ i y).
Associativity of Addition:
(x+ i y) + h(u+ i v) + (p+ i q)i= (x+ i y) + h(u+p) + i (v+q)i
2.1.2. Commutativity of Addition:
(x1, y1) + (x2, y2) = (x1x2, y1y2) = (x2, y2) + (x1, y1).
Associativity of Addition:
(x1, y1) + h(x2, y2) + (x3, y3)i= (x1x2x3, y1y2y3) = h(x1, y1) + (x2, y2)i+ (x3, y3).

Note: We can uniquely identify a point (x, y)∈Qwith the vector ( log x, log y)T∈R2. Then
the indicated operations agree with standard vector addition and scalar multiplication in R2,
and so Qis just a disguised version of R2.
♦2.1.3. We denote a typical function in F(S) by f(x) for x∈S.
Commutativity of Addition:
(f+g)(x) = f(x) + g(x) = (f+g)(x).
2.1.4. (a) ( 1,1,1,1 )T,( 1,−1,1,−1 )T,( 1,1,1,1 )T,( 1,−1,1,−1 )T.(b) Obviously not.
2.1.5. One example is f(x)≡0 and g(x) = x3−x.
2.1.6. (a)f(x) = −4x+ 3; (b)f(x) = −2x2−x+ 1.
2.1.7.
(a) x−y
xy !, ex
cos y!, and 1
3!, which is a constant function.
0!.
♦2.1.8. This is the same as the space of functions F(R2,R2). Explicitly:
Commutativity of Addition:
v1(x, y)
v2(x, y)!+ w1(x, y)
w2(x, y)!= v1(x, y) + w1(x, y)
v2(x, y) + w2(x, y)!= w1(x, y)
w2(x, y)!+ v1(x, y)
v2(x, y)!.
43

Distributivity:
(c+d) v1(x, y)
v2(x, y)!= (c+d)v1(x, y)
(c+d)v2(x, y)!=c v1(x, y)
v2(x, y)!+d v1(x, y)
v2(x, y)!,
♥2.1.9. We identify each sample value with the matrix entry mij =f(ih, j k). In this way, every
sampled function corresponds to a uniquely determined m×nmatrix and conversely. Ad-
2.1.10. a+b= (a1+b1, a2+b2, a3+b3, . . . ), ca= (ca1, ca2, ca3,…). Explicity verification of
the vector space properties is straightforward. An alternative, smarter strategy is to iden-
tify R∞as the space of functions f:N→Rwhere N={1,2,3, . . . }is the set of natural
numbers and we identify the function fwith its sample vector f= (f(1), f(2), . . . ).
c·c!v=1
c(cv) = 1
c0=0.
♦2.1.12. If 0and e
0both satisfy axiom (c), then 0=e
0+0=0+e
0=e
0.
♦2.1.13. Commutativity of Addition:
(v,w) + (b
v,b
w) = (v+b
v,w+b
w) = (b
v,b
w) + (v,w).
Associativity of Addition:
(v,w) + h(b
v,b
w) + (e
v,e
w)i= (v+b
v+e
v,w+b
w+e
w) = h(v,w) + (b
v,b
w)i+ (e
v,e
w).
2.1.14. Here V= C0while W=R, and so the indicated pairs belong to the Cartesian prod-
uct vector space C0×R. The zero element is the pair 0= (0,0) where the first 0 denotes
44
2.2.1.
(a) If v= ( x, y, z )Tsatisfies x−y+ 4 z= 0 and e
v= ( e
x, e
y, e
z)Talso satisfies e
x−e
y+ 4e
z= 0,
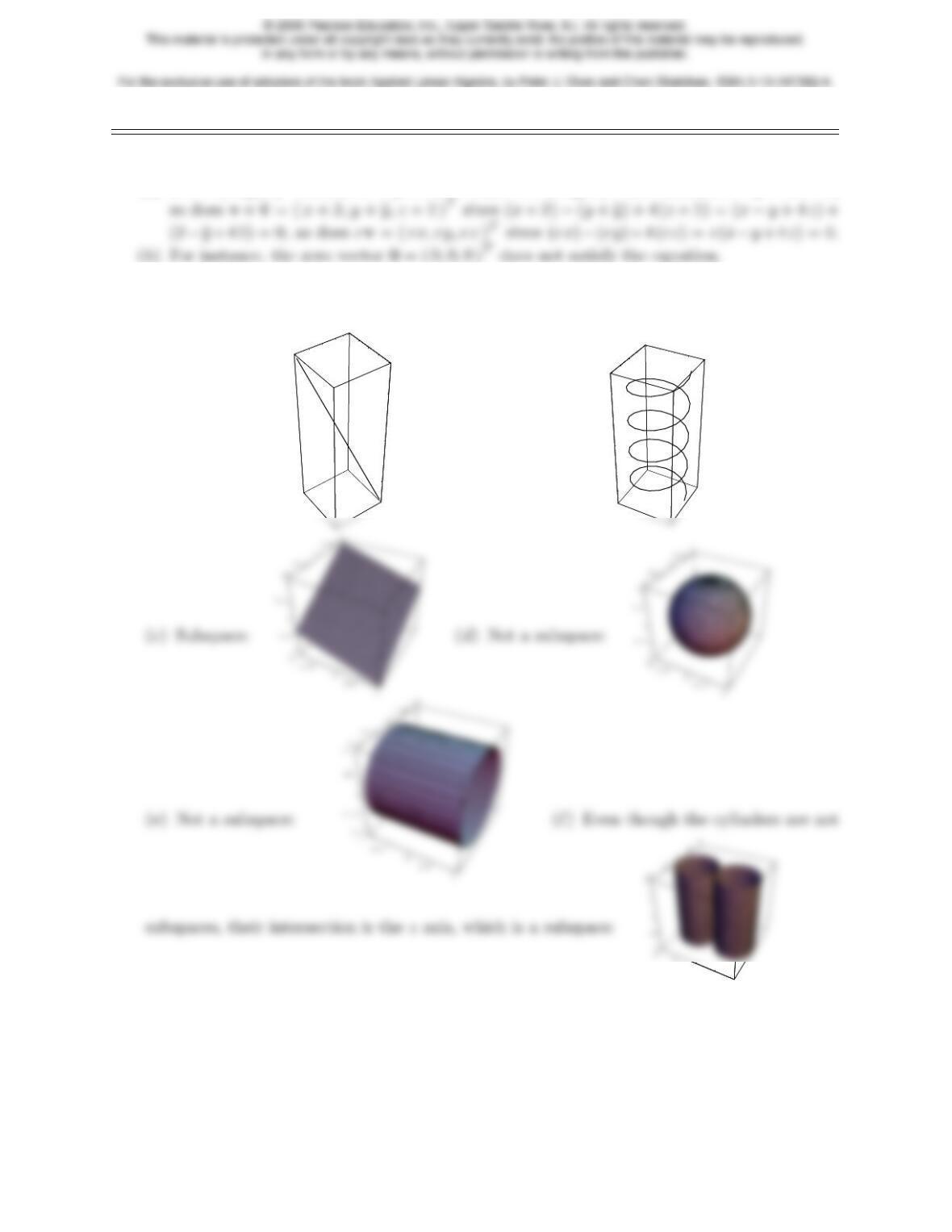
2.2.2. (b,c,d,g,i) are subspaces; the rest are not. Case (j) consists of the 3 coordinate axes and
the line x=y=z.
2.2.3. (a) Subspace:
-1
-0.5
0
0.5
1
-1
-0.5
0
0.5
1
-2
0
2
-1
-0.5
0
0.5
(b) Not a subspace:
-1-0.5 00.5 1
-1
-0.5 0
0.5 1
-10
0
10
-0.5 0
0.5 1
0
1
2
0
1
2.2.4. Any vector of the form a0
B
@
1
2
−11
C
A+b0
B
@
2
0
11
C
A+c0
B
@
0
−1
31
C
A=0
B
@
a+ 2b
2a−c
−a+b+ 3c1
C
A=0
B
@
x
y
z1
C
Awill
belong to W. The coefficient matrix 0
B
@
1 2 0
2 0 −1
−1 1 3 1
C
Ais nonsingular, and so for any
45

x= ( x, y, z )T∈R3we can arrange suitable values of a, b, c by solving the linear system.
Thus, every vector in R3belongs to Wand so W=R3.
2.2.5. False, with two exceptions: [0,0] = {0}and (−∞,∞) = R.
2.2.6.
(a) Yes. For instance, the set S={(x, 0} ∪ {(0, y)}consisting of the coordinate axes has
2.2.7. (a,c,d) are subspaces; (b,e) are not.
2.2.8. Since x=0must belong to the subspace, this implies b=A0=0. For a homogeneous
system, if x,yare solutions, so Ax=0=Ay, so are x+ysince A(x+y) = Ax+Ay=0,
as is cxsince A(cx) = cA x=0.
2.2.11.
(a) No. The zero matrix is not an element.
2.2.12. (d,f,g,h) are subspaces; the rest are not.
2.2.13. (a) Vector space; (b) not a vector space: (0,0) does not belong; (c) vector space;
(d) vector space; (e) not a vector space: If fis non-negative, then −1f=−fis not (un-
2.2.15. All cases except (e,g) are subspaces. In (g), |x|is not in C1.
2.2.16. (a) Subspace; (b) subspace; (c) Not a subspace: the zero function does not satisfy
the condition; (d) Not a subspace: if f(0) = 0, f(1) = 1, and g(0) = 1, g(1) = 0, then f
2.2.18. For instance, the zero function u(x)≡0 is not a solution.
2.2.19.

only if its component functions f1(t) and f2(t) are. Thus, if f(t) = ( f1(t), f2(t) )Tand
g(t) = ( g1(t), g2(t) )Tare continuously differentiable, so are
(f+g)(t) = ( f1(t) + g1(t), f2(t) + g2(t) )Tand (cf)(t) = ( cf1(t), cf2(t) )T.
(b) Yes: if f(0) = 0=g(0), then (cf+dg)(0) = 0for any c, d ∈R.
2.2.22.
(a) If v,w∈W∩Z, then v,w∈W, so cv+dw∈Wbecause Wis a subspace, and
v,w∈Z, so c v +dw∈Zbecause Zis a subspace, hence cv+dw∈W∩Z.
♦2.2.23. If v,w∈TWi, then v,w∈Wifor each iand so cv+dw∈Wifor any c, d ∈Rbecause
Wiis a subspace. Since this holds for all i, we conclude that cv+dw∈TWi.
♥2.2.24.
(a) They clearly only intersect at the origin. Moreover, every v= x
y!= x
0!+ 0
y!can
be written as a sum of vectors on the two axes.
(b) Since the only common solution to x=yand x= 3yis x=y= 0, the lines only
intersect at the origin. Moreover, every v= x
y!= a
a!+ 3b
b!, where a=−1
2x+3
2y,
2.2.25.
(a) (v,w)∈V0∩W0if and only if (v,w) = (v,0) and (v,w) = (0,w), which means v=
2.2.26.
(a) If f(−x) = f(x), e
f(−x) = e
f(x), then (cf +de
f)(−x) = cf(−x) + de
f(−x) = cf(x) +
de
f(x) = (cf +de
f)(x) for any c, d, ∈R, and hence it is a subspace.
(b) If g(−x) = −g(x), e
g(−x) = −e
g(x), then (cg +de
g)(−x) = cg(−x) + de
g(−x) =
−cg(x)−de
g(x) = −(cg +de
g)(x), proving it is a subspace. If f(x) is both even and
47

odd, then f(x) = f(−x) = −f(x) and so f(x)≡0 for all x. Moreover, we can write any
function h(x) = f(x) + g(x) as a sum of an even function f(x) = 1
2hh(x) + h(−x)iand
an odd function g(x) = 1
2hh(x)−h(−x)i.
(c) This follows from part (b), and the uniqueness follows from Exercise 2.2.24(d).
2.2.27. If A=ATand A=−ATis both symmetric and skew-symmetric, then A= O.
♦2.2.28.
(a) By induction, we can show that
f(n)(x) = Pn 1
x!e−1/x =Qn(x)e−1/x
xn,
2.2.29.
(a) The Taylor series is the geometric series 1
♥2.2.30.
(a) If v+a,w+a∈A, then (v+a)+(w+a) = (v+w+a)+a∈Arequires v+w+a=u∈V,
and hence a=u−v−w∈A.
1
2
3
1
2
3
1
2
3
48
2.3.1. 0
B
@−1
2
31
C
A= 20
B
@
2
−1
21
C
A−0
B
@
5
−4
11
C
A.
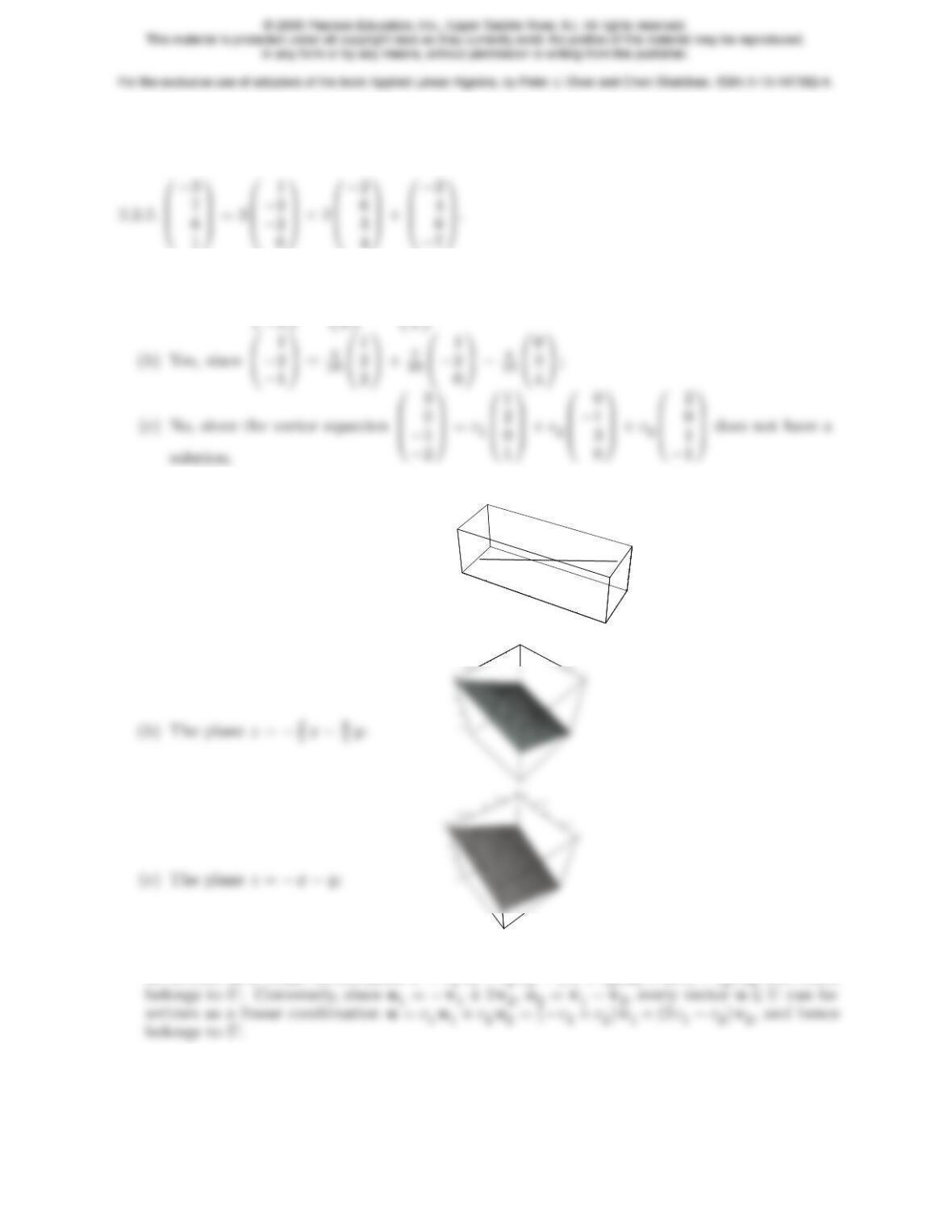
2.3.3.
(a) Yes, since 0
B
@
1
−2
C
A=0
B
@
1
1
C
A−30
B
@
0
1
C
A;
2.3.4. Cases (b), (c), (e) span R2.
2.3.5.
(a) The line ( 3 t, 0, t )T:
-2
0
2-1
-0.5
00.5
1
-1
-0.5
0
0.5
1
-2
0
2
-1
-0.5
0
-1 -0.5
0
0
0.5 1
0
0.5
2.3.6. They are the same. Indeed, since v1=u1+ 2 u2,v2=u1+u2, every vector v∈Vcan
be written as a linear combination v=c1v1+c2v2= (c1+c2)u1+ (2 c1+c2)u2and hence
2.3.7. (a) Every symmetric matrix has the form a b
b c !=a 1 0
0 0 !+c 0 0
0 1 !+b 0 1
1 0 !.
49
2.3.8.
(a) They span P(2) since ax2+bx+c=1
2(a−2b+c)(x2+1)+ 1
2(a−c)(x2−1)+b(x2+x+1).
2.3.9. (a) Yes. (b) No. (c) No. (d) Yes: cos2x= 1 −sin2x. (e) No. (f) No.
2.3.10. (a) sin 3x= cos“3x−1
2.3.13. (a)e2x; (b) cos 2x, sin 2x; (c)e3x,1; (d)e−x, e−3x; (e)e−x/2cos √3
2x,
e−x/2sin √3
2x; (f)e5x,1, x; (g)ex/√2cos x
√2, ex/√2sin x
√2, e−x/√2cos x
√2, e−x/√2sin x
√2.
2.3.15. (a) 2
1!= 2 f1(x) + f2(x)−f3(x); (b) not in the span; (c) 1−2x
−1−x!=f1(x)−
f2(x)−f3(x); (d) not in the span; (e) 2−x
0!= 2 f1(x)−f3(x).
2.3.16. True, since 0= 0 v1+···+ 0vn.
01
♦2.3.18. By the assumption, any v∈Vcan be written as a linear combination
v=c1v1+··· +cmvm=c1v1+··· +cnvm+ 0vm+1 +··· + 0vn
of the combined collection.
♦2.3.19.
50

♦2.3.20.
(a) If v=
m
X
i= 1
aivi,w=
n
X
i= 1
bivi, are two finite linear combinations, so is
2.3.21. (a) Linearly independent; (b) linearly dependent; (c) linearly dependent;
(d) linearly independent; (e) linearly dependent; (f) linearly dependent;
(g) linearly dependent; (h) linearly independent; (i) linearly independent.
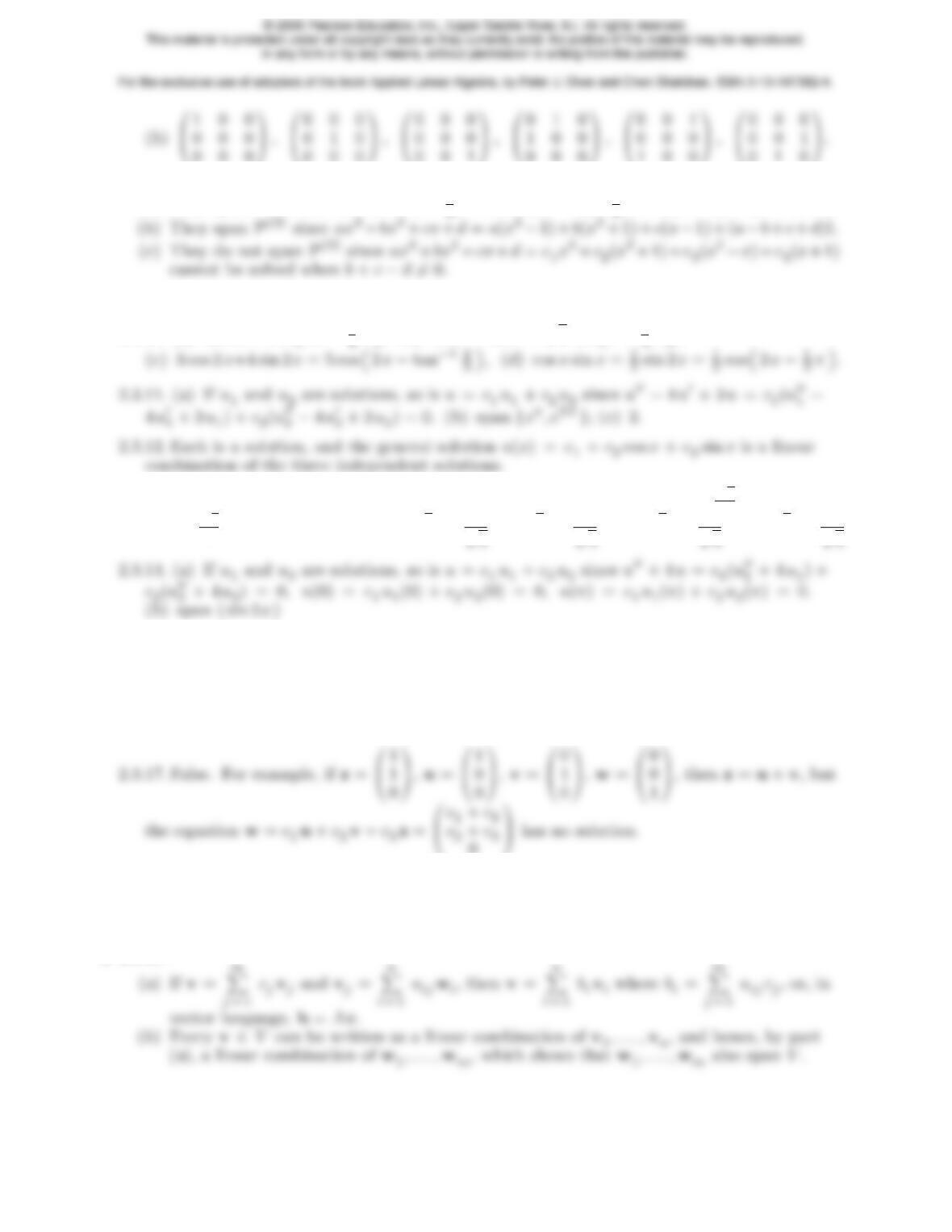
2.3.22. (a) The only solution to the homogeneous linear system
2.3.23.
(a) The only solution to the homogeneous linear system
Ac=c10
B
B
B
@
1
1
1
0
1
C
C
C
A+c20
B
B
B
@
1
1
−1
0
1
C
C
C
A+c30
B
B
B
@
1
−1
0
1
1
C
C
C
A+c40
B
B
B
@
1
−1
0
−1
1
C
C
C
A=0
with nonsingular coefficient matrix A=0
B
B
B
@
1 1 1 1
1 1 −1−1
1−1 0 1
1
C
C
C
Ais c=0.
2.3.24. (a) Linearly dependent; (b) linearly dependent; (c) linearly independent; (d) linearly
dependent; (e) linearly dependent; (f) linearly independent.
2.3.25. False:
51

2.3.28. Because x,yare linearly independent, 0=c1u+c2v= (ac1+cc2)x+ (bc1+d c2)yif
and only if ac1+cc2= 0, bc1+d c2= 0. The latter linear system has a nonzero solution
(c1, c2)6=0, and so u,vare linearly dependent, if and only if the determinant of the coef-
ficient matrix is zero: det a c
b d !=ad −bc = 0, proving the result. The full collection
x,y,u,vis linearly dependent since, for example, ax+by−u+0v=0is a nontrivial linear
combination.
2.3.29. The statement is false. For example, any set containing the zero element that does not
span Vis linearly dependent.
2.3.32.
(a) They are linearly dependent since (x2−3) + 2(2 −x)−(x−1)2≡0.
(b) They do not span P(2).
♥2.3.35.
(a) 0 =
k
X
i= 1
cipi(x) =
n
X
j= 0
k
X
i= 1
ciaij xjif and only if
n
X
j= 0
k
X
i= 1
ciaij = 0, j= 0, . . . , n, or, in
matrix notation, ATc=0. Thus, the polynomials are linearly independent if and only if
the linear system ATc=0has only the trivial solution c=0if and only if its (n+1)×k
♦2.3.36. Suppose the linear combination p(x) = c0+c1x+c2x2+··· +cnxn≡0 for all x.
Thus, every real xis a root of p(x), but the Fundamental Theorem of Algebra says this is
only possible if p(x) is the zero polynomial with coefficients c0=c1=··· =cn= 0.
52

♥2.3.37.
(a) If c1f1(x) + ··· +cnfn(x)≡0, then c1f1(xi) + ··· +cnfn(xi) = 0 at all sample points,
and so c1f1+··· +cnfn=0. Thus, linear dependence of the functions implies linear
dependence of their sample vectors.
2.3.38.
(a) Suppose c1f1(t) + ··· +cnfn(t)≡0for all t. Then c1f1(t0) + ···+cnfn(t0) = 0, and
hence, by linear independence of the sample vectors, c1=··· =cn= 0, which proves
linear independence of the functions.
♥2.3.39.
(a) Suppose c1f(x) + c2g(x)≡0 for all xfor some c= ( c1, c2)T6=0. Differentiating,
we find c1f′(x) + c2g′(x)≡0 also, and hence 0
@f(x)g(x)
f′(x)g′(x)1
A0
@c1
c21
A=0for all x.
2.4.1. Only (a) and (c) are bases.
2.4.2. Only (b) is a basis.
53

(c) No, because if v1,v2,v3,v4don’t span R3, no subset of them will span it either.
(d) 2, because v1and v2are linearly independent and span the subspace, and hence form a
basis.
2.4.5.
(a) They span R3because the linear system Ac=bwith coefficient matrix
2.4.6.
(a) Solving the defining equation, the general vector in the plane is x=0
B
@
2y+ 4z
y
z1
C
Awhere
y, z are arbitrary. We can write x=y0
B
@
2
1
01
C
A+z0
B
@
4
0
11
C
A= (y+ 2z)0
B
@
2
−1
11
C
A+ (y+z)0
B
@
0
2
−11
C
A
and hence both pairs of vectors span the plane. Both pairs are linearly independent
♥2.4.7. (a) (i) Left handed basis; (ii) right handed basis; (iii) not a basis; (iv) right handed
basis. (b) Switching two columns or multiplying a column by −1 changes the sign of the
determinant. (c) If det A= 0, its columns are linearly dependent and hence can’t form a
basis.
2.4.8.
(a)“−2
3,5
6,1,0”T,“1
3,−2
3,0,1”T; dim = 2.
2.4.9. (a)0
B
@
3
1
−11
C
A, dim = 1; (b)0
B
@
2
0
11
C
A,0
B
@
0
−1
31
C
A, dim = 2; (c)0
B
B
B
@
1
0
−1
2
1
C
C
C
A,0
B
B
B
@
0
1
1
3
1
C
C
C
A,0
B
B
B
@
1
−2
1
1
1
C
C
C
A, dim = 3.
2.4.10. (a) We have a+bt +ct2=c1(1 + t2) + c2(t+t2) + c3(1 + 2t+t2) provided a=c1+c3,
54

2.4.11. (a)a+bt+c t2+dt3=c1+c2(1−t)+c3(1−t)2+c4(1−t)3provided a=c1+c2+c3+c4,
b=−c2−2c3−3c4, c =c3+ 3c4, d =−c4. The coefficient matrix 0
B
B
B
@
1 1 1 1
0−1−2−3
0 0 1 3
0 0 0 −1
1
C
C
C
A
2.4.12. (a) They are linearly dependent because 2 p1−p2+p3≡0. (b) The dimension is 2,
since p1, p2are linearly independent and span the subspace, and hence form a basis.
2.4.13.
(a) The sample vectors 0
B
B
B
B
B
@
1
1
1
1
C
C
C
C
C
A
,0
B
B
B
B
B
@
1
√2
2
0
1
C
C
C
C
C
A
,0
B
B
B
B
B
@
1
0
−1
1
C
C
C
C
C
A
,0
B
B
B
B
B
@
1
−√2
2
0
√2
1
C
C
C
C
C
A
are linearly independent and
2.4.14.
(a)E11 = 1 0
0 0 !, E12 = 0 1
0 0 !, E21 = 0 0
1 0 !, E22 = 0 0
0 1 !is a basis since we
can uniquely write any a b
c d !=aE11 +bE12 +cE21 +dE22.
(b) Similarly, the matrices Eij with a 1 in position (i, j) and all other entries 0, for
i= 1, . . . , m, j = 1,…,n, form a basis for Mm×n, which therefore has dimension mn.
2.4.15. k6=−1,2.
2n(n+ 1).
2.4.18. (a) Symmetric: dim = 3; skew-symmetric: dim = 1; (b) symmetric: dim = 6; skew-
symmetric: dim = 3; (c) symmetric: dim = 1
2n(n+1); skew-symmetric: dim = 1
2n(n−1).
♥2.4.19.
(a) If a row (column) of Aadds up to aand the corresponding row (column) of Badds up
55

(b) A matrix A=0
B
@
a b c
d e f
g h j 1
C
Ais a semi-magic square if and only if
a+b+c=d+e+f=g+h+j=a+d+e=b+e+h=c+f+j.
(c) The dimension is 5, with any 5 of the 6 permutation matrices forming a basis.
(d) Yes, by the same reasoning as in part (a). Its dimension is 3, with basis
0
B
@
2 2 −1
−2 1 4
3 0 0 1
C
A,0
B
@
2−1 2
1 1 1
0 3 0 1
C
A,0
B
@−1 2 2
4 1 −2
0 0 3 1
C
A.
♦2.4.21.
(a) By Theorem 2.31, we only need prove linear independence. If 0=c1Av1+··· +
cnAvn=A(c1v1+··· +cnvn), then, since Ais nonsingular, c1v1+··· +cnvn=0,
and hence c1=···=cn= 0.
(b)Aeiis the ith column of A, and so a basis consists of the column vectors of the matrix.
♦2.4.23. This is a special case of Exercise 2.3.31(a).
♦2.4.24.
(a)m≤nas otherwise v1, . . . , vmwould be linearly dependent. If m=nthen v1, . . . , vn
56