Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (6)
Derived from Newton’s Second Law: the change of angular
momentum equals torque in the pitch plane:
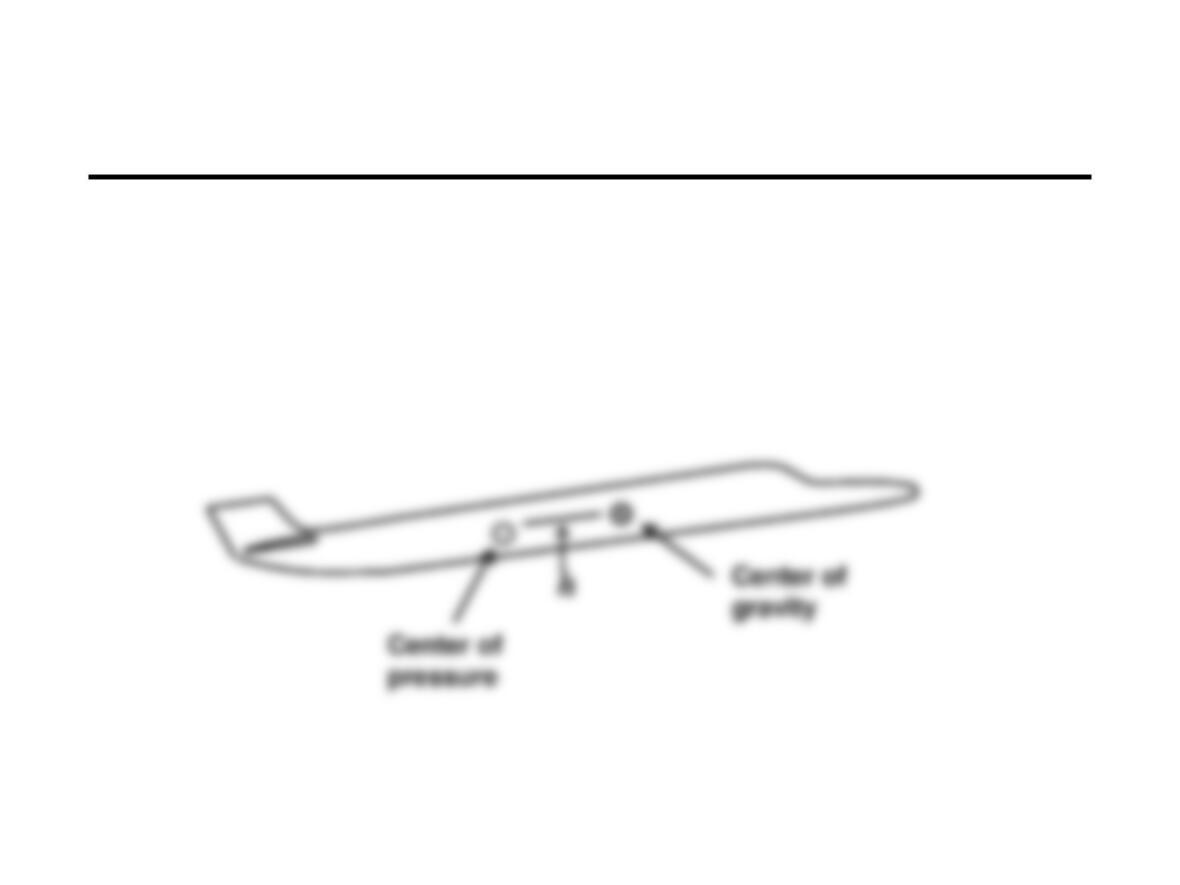
Most of the pitch moment comes from the lift force as described in
Equation A-2, acting through the moment arm that is the
distance between the center of pressure and the center of gravity.
h
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (7)
The center of gravity of the aircraft must be forward of center of
pressure for the aircraft to be stable.
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (8)
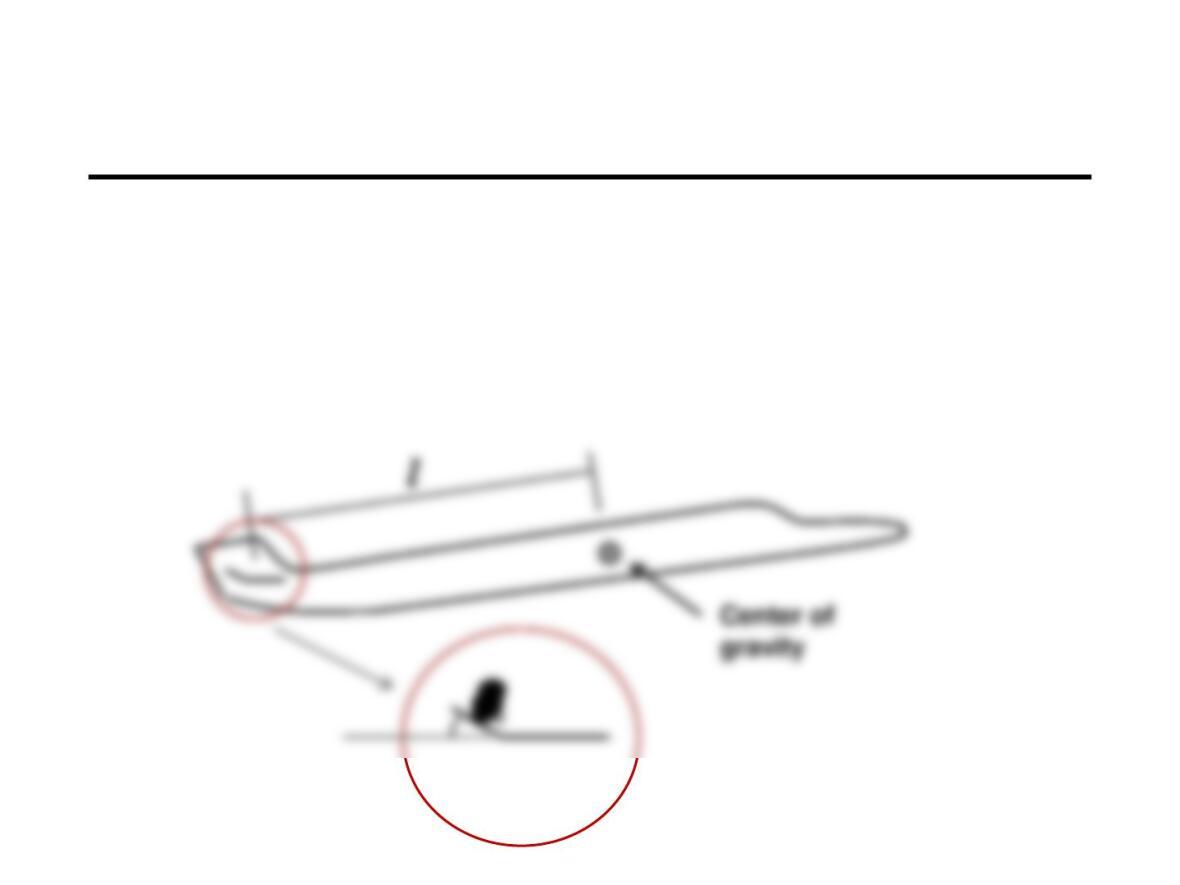
To determine the moments due to perturbations we must delve
deeper into aircraft dynamics and consider an additional concept:
static stability, and the effect of the movable “elevator” control
surface on the tail.
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (9)
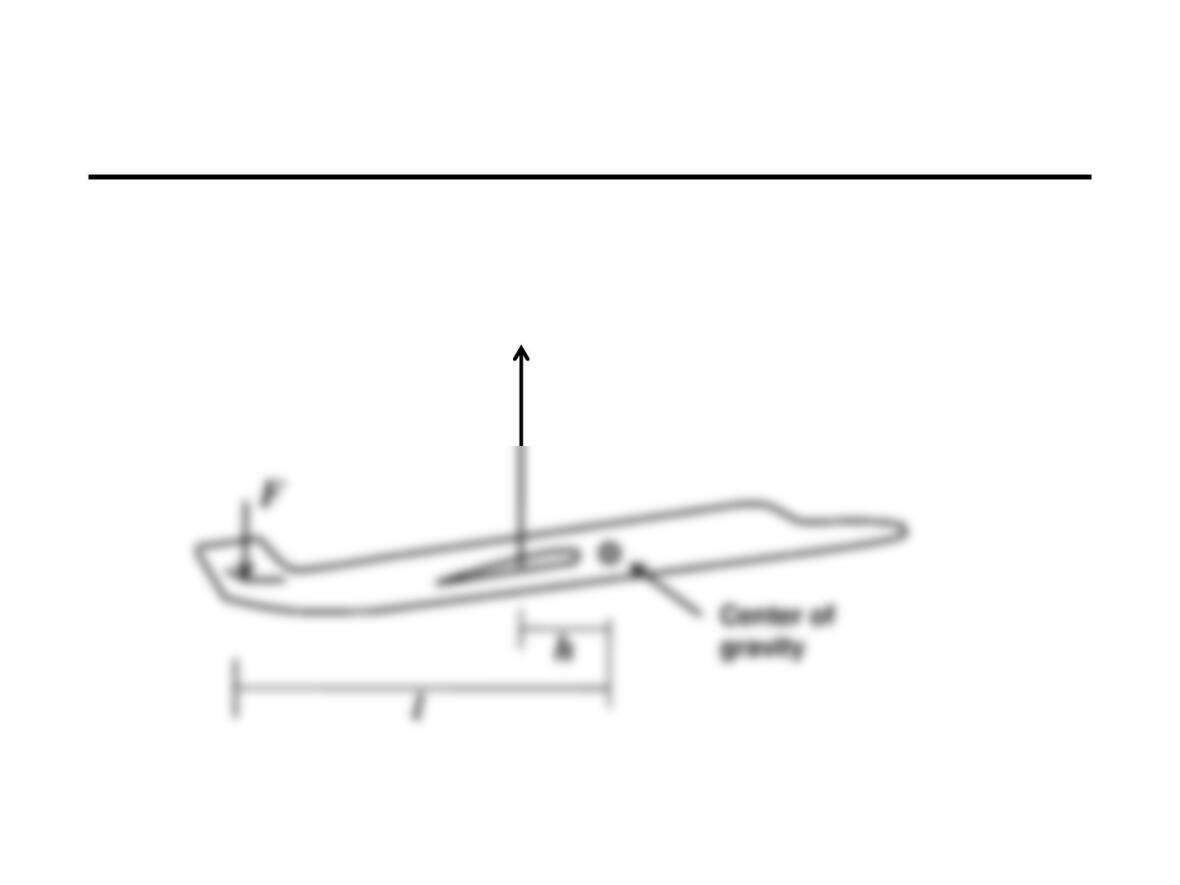
L
The force on the tails must provide a moment to
counterbalance the moment due to lift
0=− LhFl
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (10)
Now
Hence the pitch moment is zero independent of speed, because
=
2
2
2
V
SC
L
L
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (11)
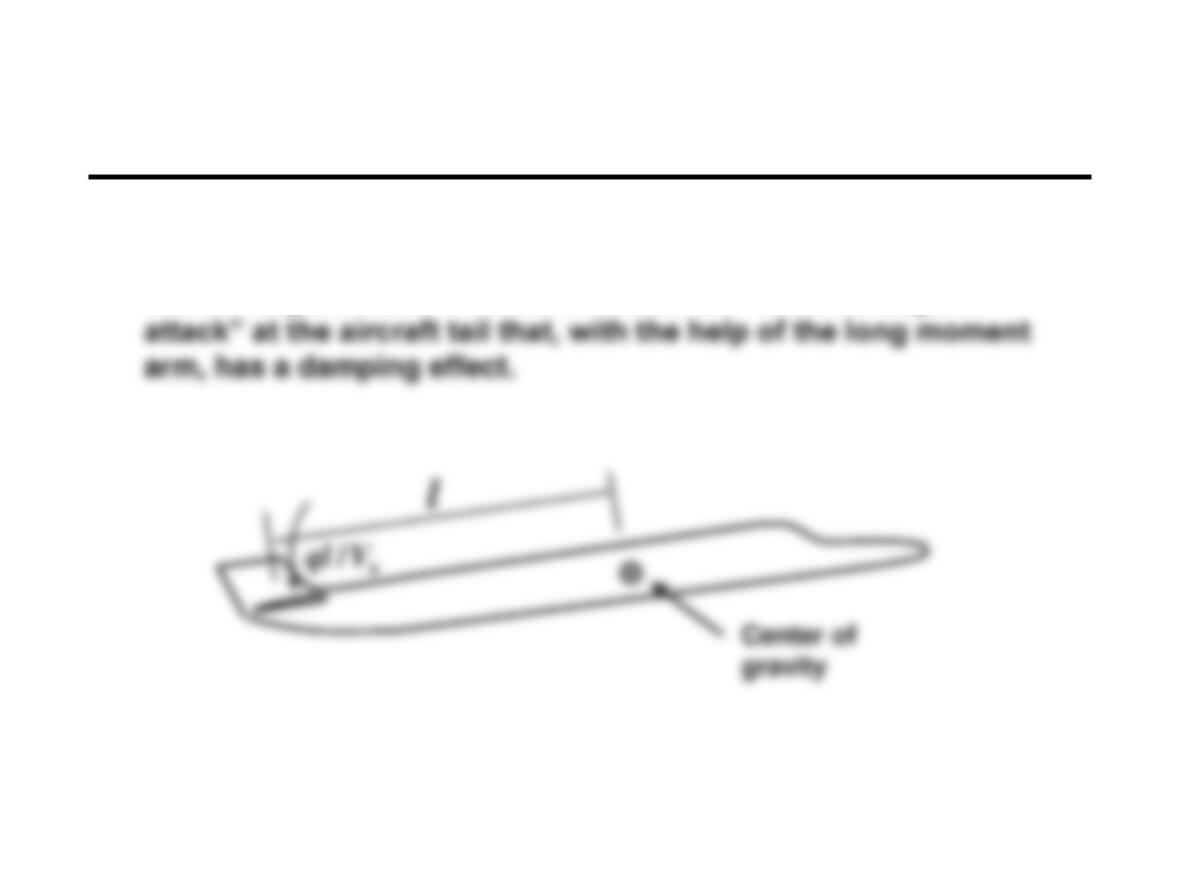
There is another small effect we were able to neglect earlier but
cannot neglect here. Pitch rate causes an “induced angle of
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (12)
Define the variable
The induced angle of attack at the aircraft tail is
and the moment due to pitch rate is approximately
where
T
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (13)
Therefore we have
qlCVShCSV
dq
I
LTLp
T
−−=
)2/()2/(
2
0
2
0
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (14)
So far the system of first order ODEs for aircraft longitudinal
dynamics reads as follows:
Appendix: Deriving Linearized
Equations of Motion for Perturbed Flight (15)
We must eliminate one of the three angles related through the equation
We choose to eliminate and then, with some reordering, the final
linearized equations of motion are
−=
Example Aircraft: Cessna Citation CJ-3
Example Aircraft: Cessna Citation CJ-3 (2)
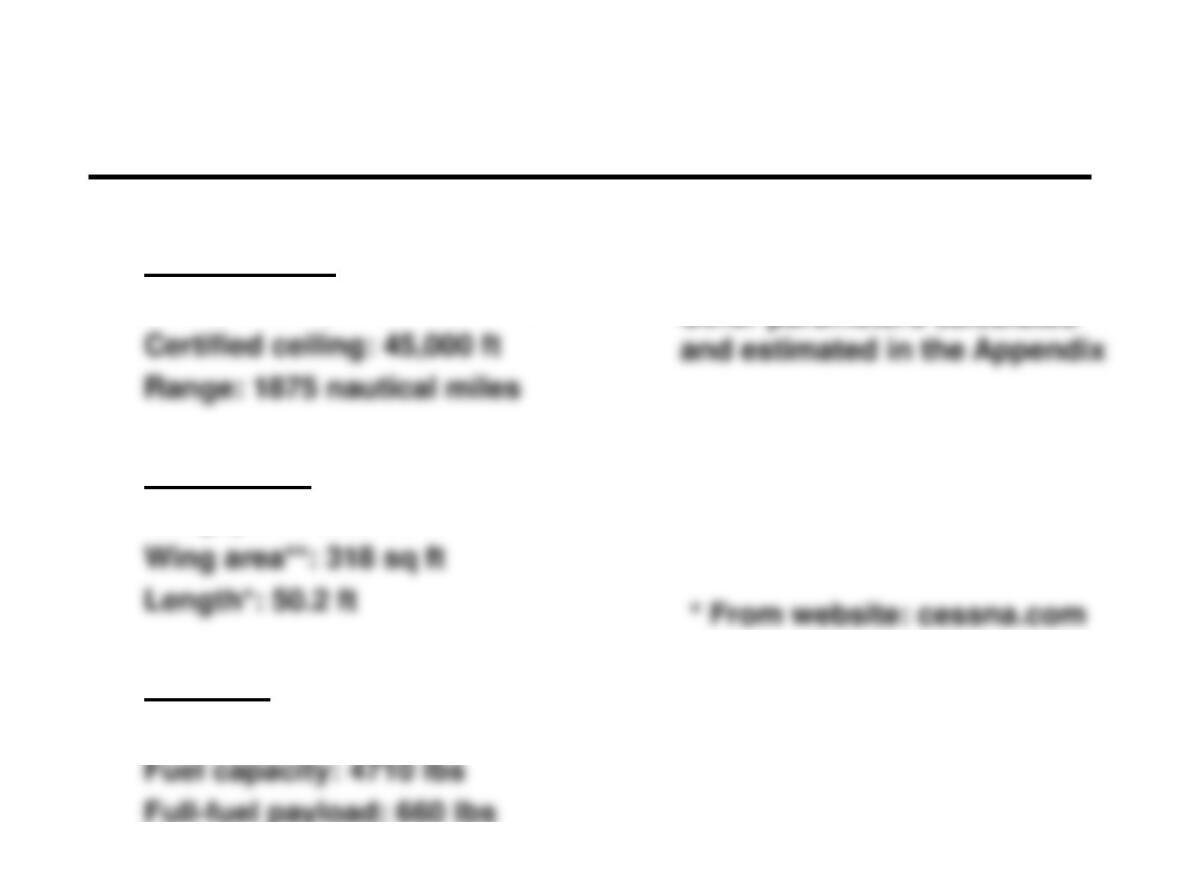
Performance*:
Max cruise speed: 417 knots
Dimensions:
Wingspan*: 53.3 ft
Weights*:
Empty weight: 8700 lbs
Other parameters calculated
** From Anderson, J.D.,
Introduction to Flight
Appendix: Parameters for Example Aircraft
Conditions:
Altitude: 30,000 ft (air density = )
Estimated parameters
34 ft/slugs10x9.8 −
*02.
0,
=
D
C
Appendix: Parameters for Example Aircraft (2)
Calculated parameters:
93.8/
243.0)2//(
1094.42/
2
2
0
42
0
==
==
=
L
SbAR
SVWC
lbsxSV
10.1
2
0
==
L
m
CSV
L
Linearized Equations of Motion
For Example Aircraft
−−−
u
DVgDVgLD
u
0)/()/)(/(2
0000
−
−−−
u
u
010.110.1109.0
00235.0310.00101.0