Differential Equations
for Engineers:
the Essentials
Class 10 notes
Agenda: Class 10
Reviewing Homework #6
Lectures: Second Order Linear nonhomogeneous ODEs:
General solution
Homework Assignment 10
Second Order Differential Equations
Solution to Linear Nonhomogeneous
ODEs
General Solution to Nonhomogeneous ODE
Theorem:
The general solution to the 2nd order linear ODE
can be written as
(Stated without proof.)
)()()(
2
2
tgytq
dt
dy
tp
dt
yd =++
Yycycty ++= 2211
)(
Equation A
Kernel Theorem
Theorem:
If and are fundamental solutions to the second order
linear homogeneous ODE
is
)(
1ty
)(
2ty
=t
tdgtKty
0
)(),()(

Kernel Theorem(2)
where
and
)(/))()()()((),( 1221
WytyytytK +−=
Convolution
If the ODE is time-invariant the solution
has the form
=t
tdgtKty
0
)(),()(
Kernel Theorem Proof
Proof (Variation of Parameters):
We look for a solution in the form
Then
and are left with
)()()()()( 2211 tytutytuty +=
2211 yuyuy +=
Equation 1
Kernel Theorem Proof (2)
Then
Now substitute the expressions for , , and in the ODE
After some rearranging one obtains
22221111 yuyuyuyuy +++=
)(ty
)(ty
)(ty
Kernel Theorem Proof (3)
Now
so Equation 3 becomes
0)()(
0)()(
222
111
=++
=++
ytqytpy
ytqytpy

Kernel Theorem Proof (4)
Solving, we find that
where
Wgyu /
21 −=
Wgyu /
12 =
1221 yyyyW −=
Equations 4,5
Kernel Theorem Proof (5)
Substituting Equations 6 and 7 into Equation 1 we have
Defining
+−= t
t
t
td
W
gy
tyd
W
gy
tyty
00 )(
)()(
)(
)(
)()(
)()( 1
2
2
1
Second Order Linear Nonhomogeneous
ODEs
Engineering Example:
Automobile Cruise Control
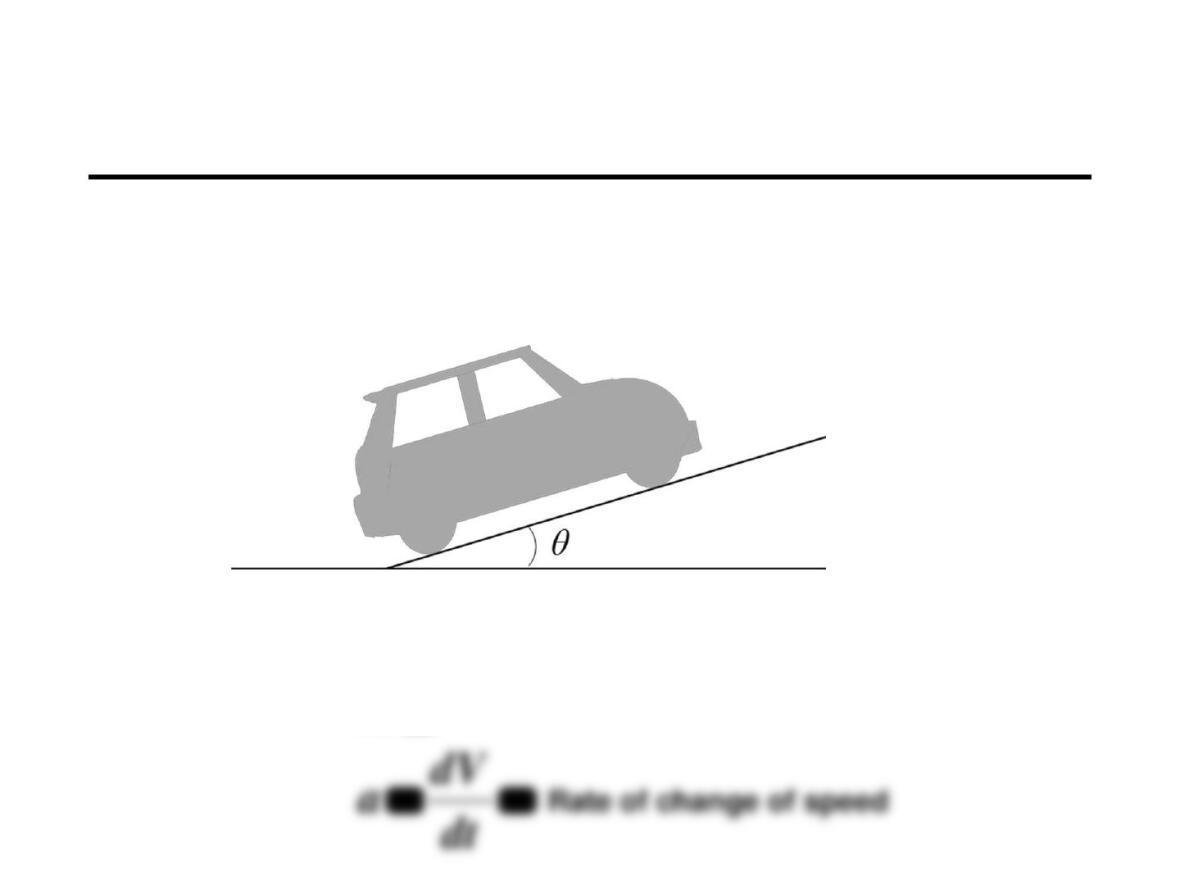
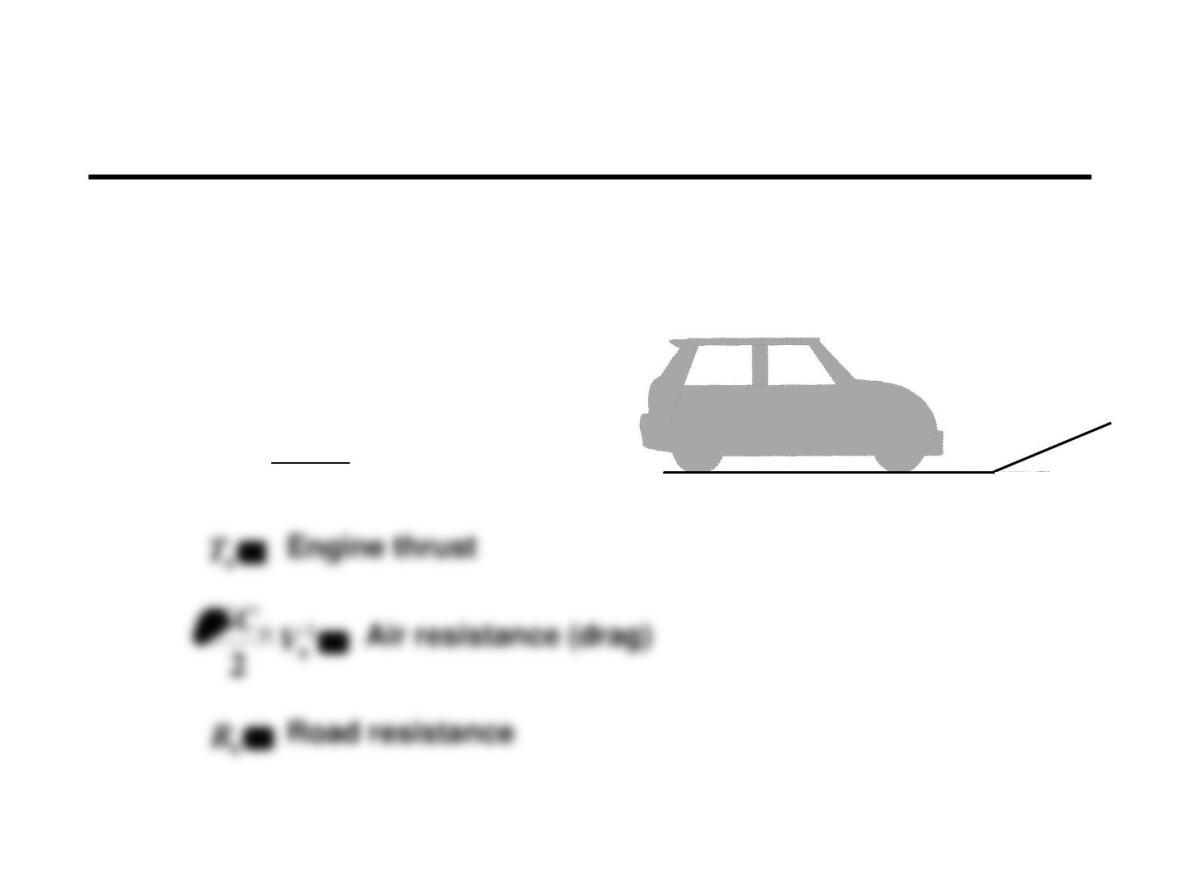
Example: Cruise Control
Consider an automobile under cruise (speed) control transitioning
from a level roadway to an ascending grade
maF=
Newton’s second law of motion
=m
Mass of vehicle
Example: Cruise Control (2)
Auto is in steady state on level
roadway prior to reaching
ascending grade.
0
2
00 2RV
SC
TD+=
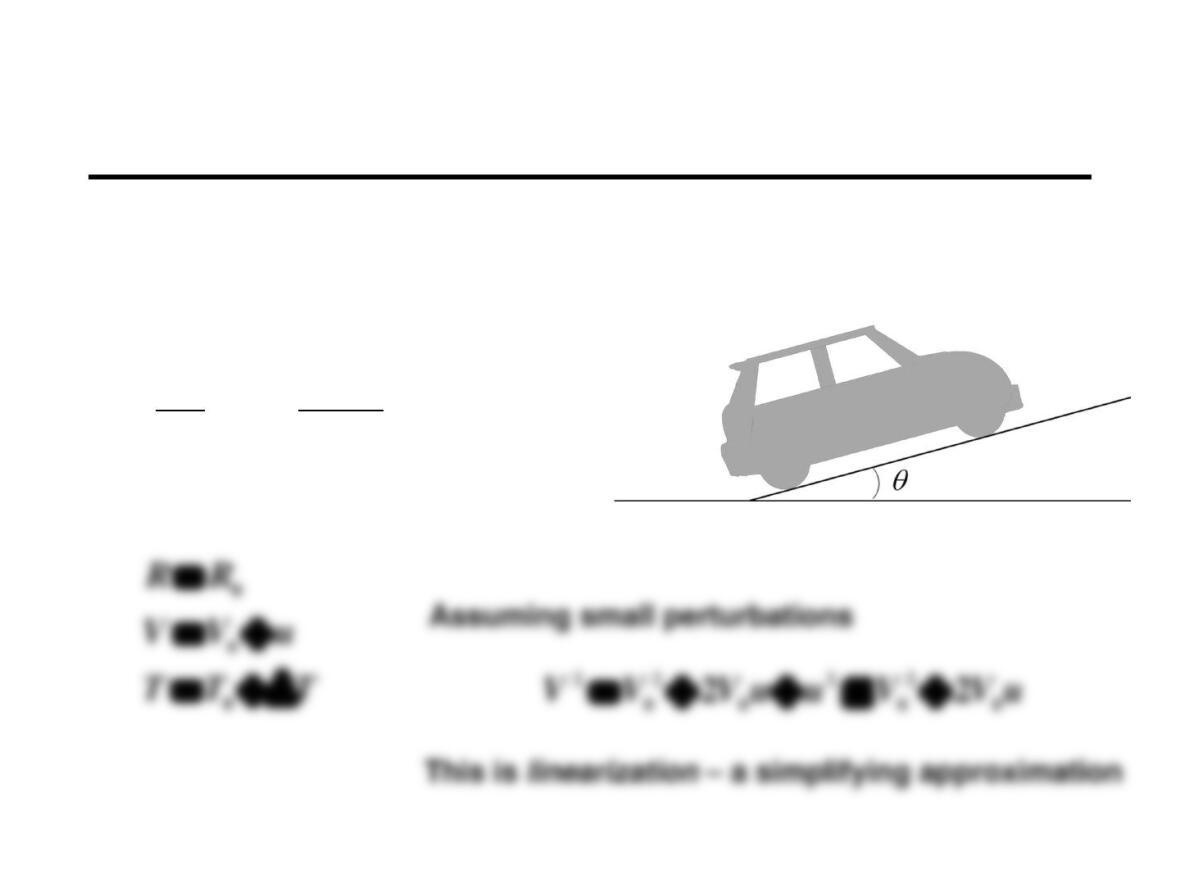
Example: Cruise Control (3)
sin
2
2mgRV
SC
T
dt
dV
mD−−−=
When the car transitions to the
ascending grade
Assume
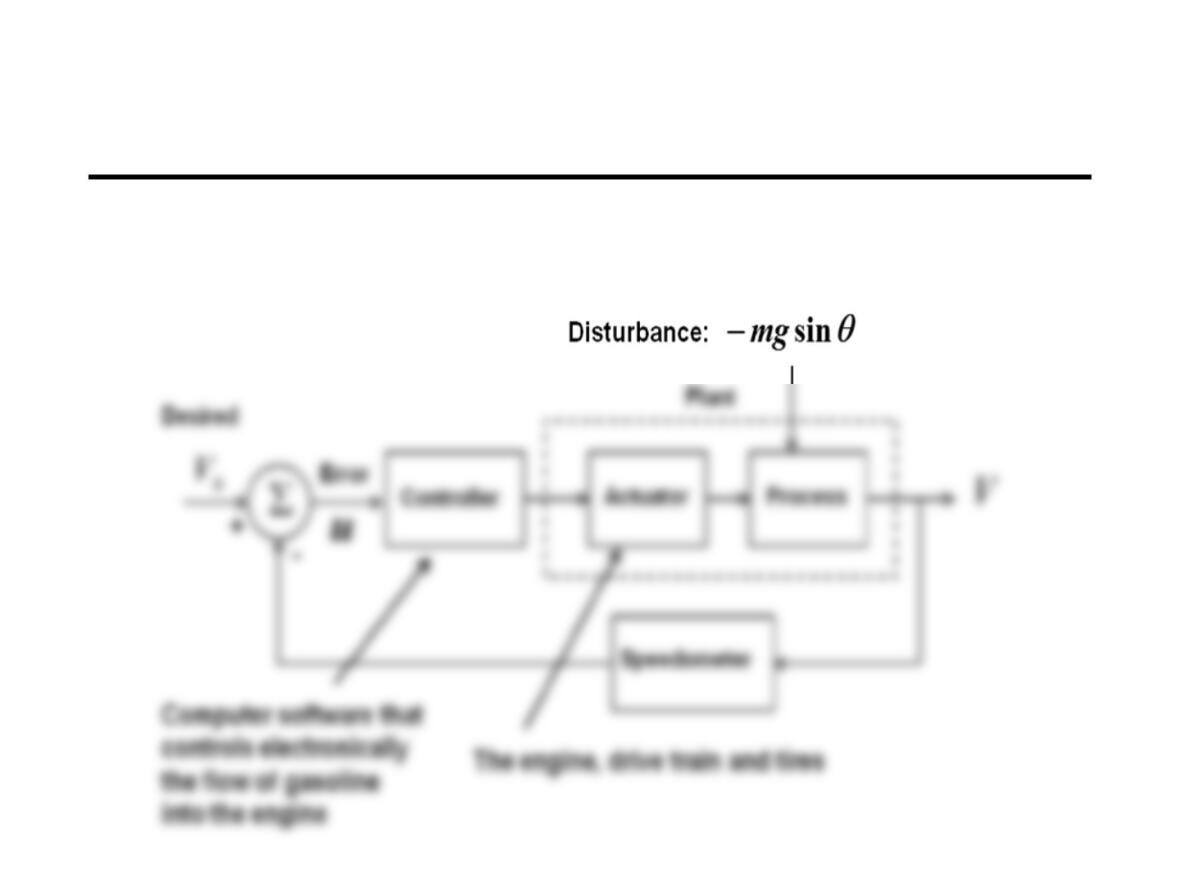
Example: Cruise Control (4)
Block diagram for cruise control system:
−−= tdukukT
)(
21
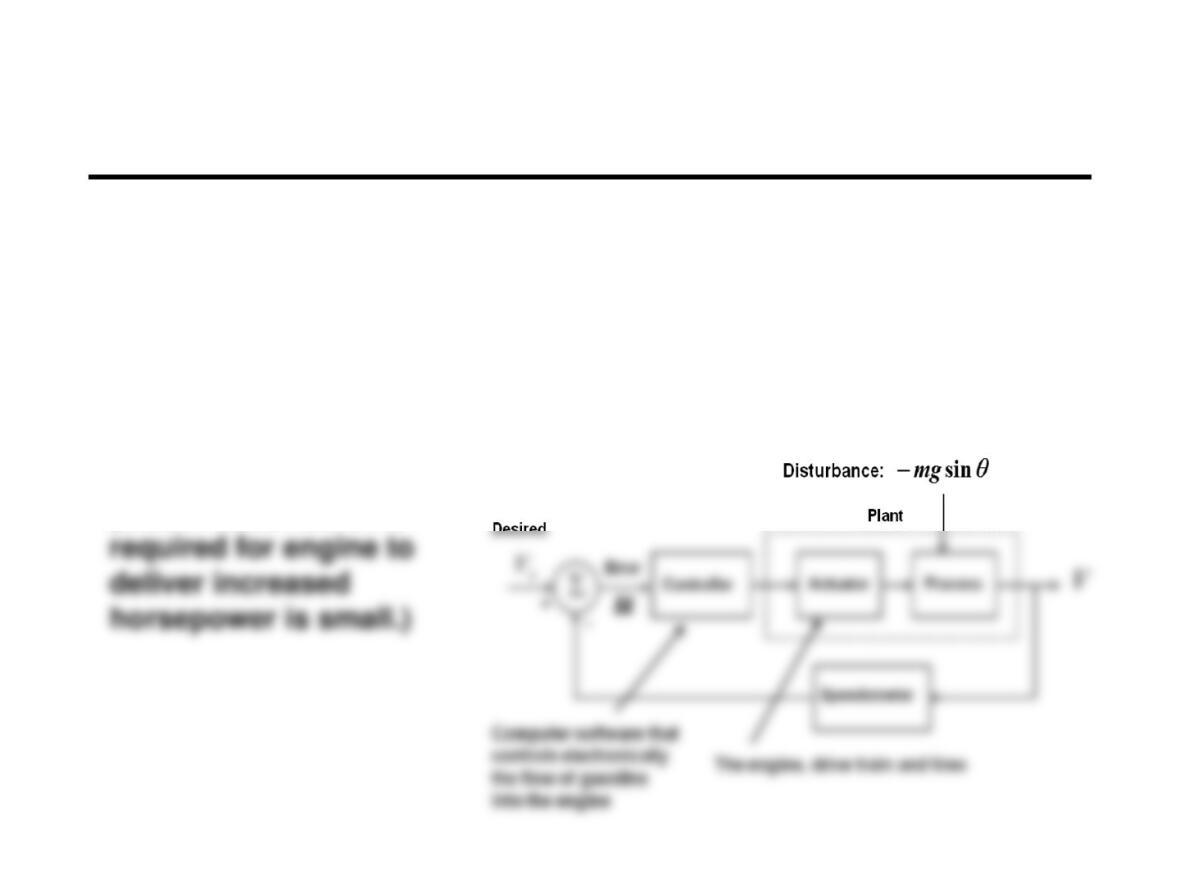
Model for controller plus actuator:
(Model assumes time
Proportional plus integral control law
Example: Cruise Control (5)
Example: Cruise Control (6)
( )
sin)(
22100
2
00 mgdukukVSCRV
SC
T
dt
du
mt
D
D−−+−
−−=
Equals zero
Model for “Process”:
Equation 1
Example: Cruise Control (7)
sin
2
2
gby
dt
dy
a
dt
yd −=++
Then Equation 1 becomes
Equation 2
where