Davies: Computer Vision, 5th edition: Solutions to selected problems 42
19.1
From the main text in Chapter 16, the standard formulae for depth from disparity are:
f/Z = x1/(X + b/2) = x2/(X – b/2)
Hence:
so the numerical values of the fractional errors in Z and D are equal.
This means that the fractional error in depth is strongly limited by the pixel size, and
This means that the size of D in pixels equals the size of f in pixels, scaled (downwards)
by the factor b/Z which is dimensionless. b and Z can be regarded as world variables
(which are both measured in metres).
19.2
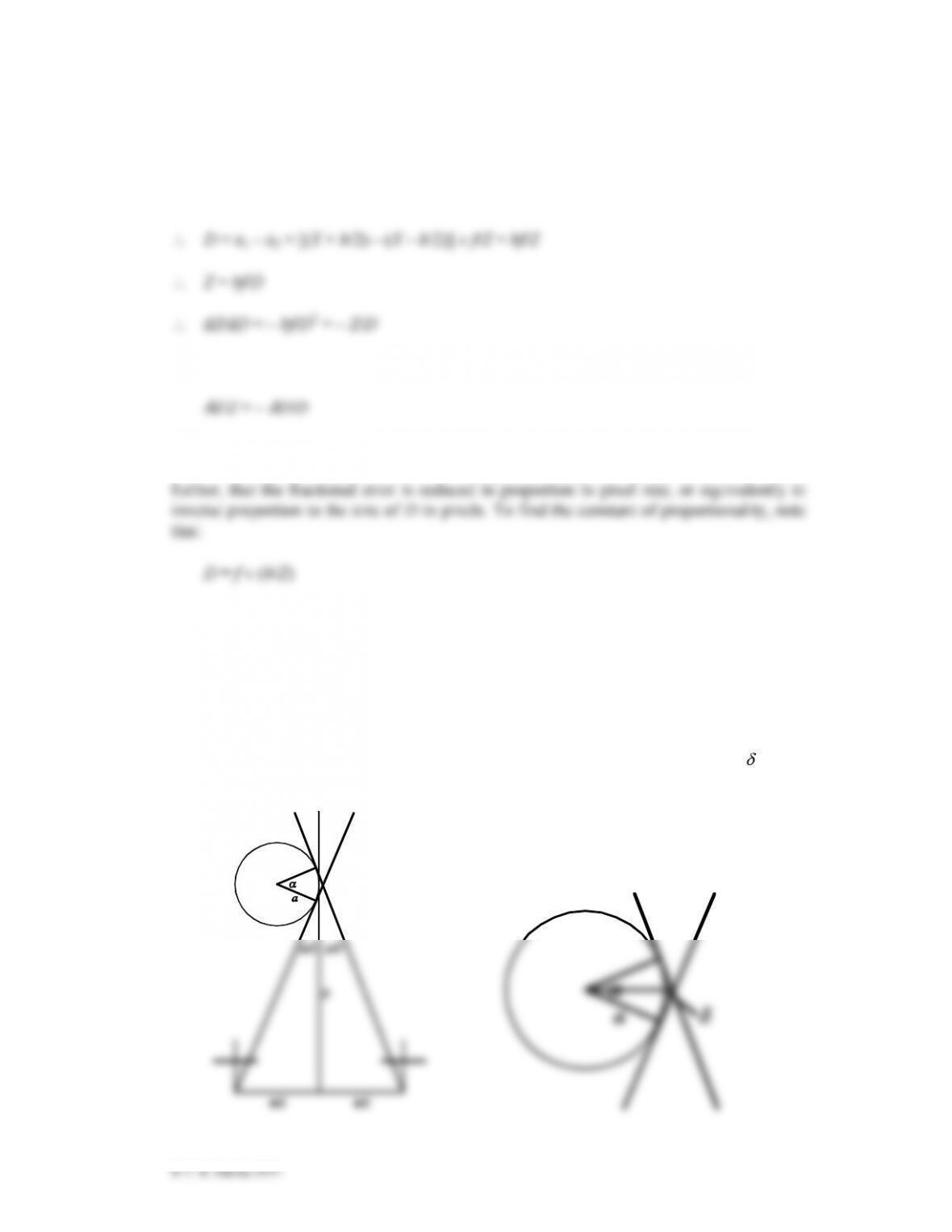
The basic geometry appears in the figure on the left, and the details of the error appear
in the figure on the right:

Davies: Computer Vision, 5th edition: Solutions to selected problems 43
We now have:
19.3
To reduce the ambiguities as far as possible, and to ensure accuracy of location of any
feature, the aim should be to generate two epipolar lines that are as close to perpendicular
as possible in at least one image space. This will uniquely define any feature. Once a
feature is defined uniquely, no further loss of ambiguity can result from use of additional