Solution Manual for Introduction to Mechatronic Design Do Not Circulate
Chapter 26 Stepper Motors
26.1) Show the three different wiring configurations with three different coil resistances for a universal wound
motor driven in a bi-polar drive circuit.
26.2) Show how you would wire a universal wound motor to use it in a uni-polar drive circuit.
26.3) If a stepper motor were specified as having a maximum step error of ± 1°, what is the worst case positional
accuracy for that motor?
26.4) Name the three types of stepper motor construction described in this chapter.
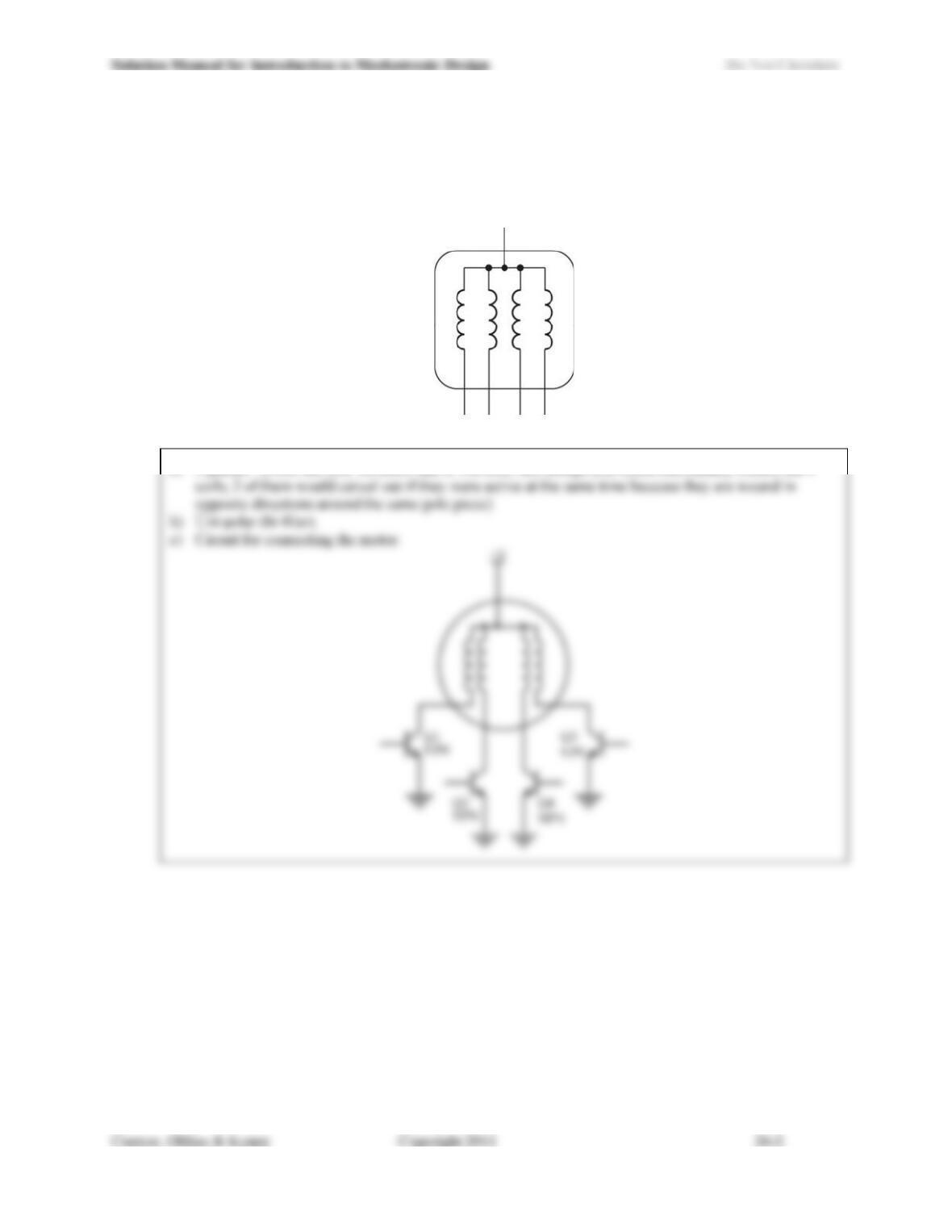
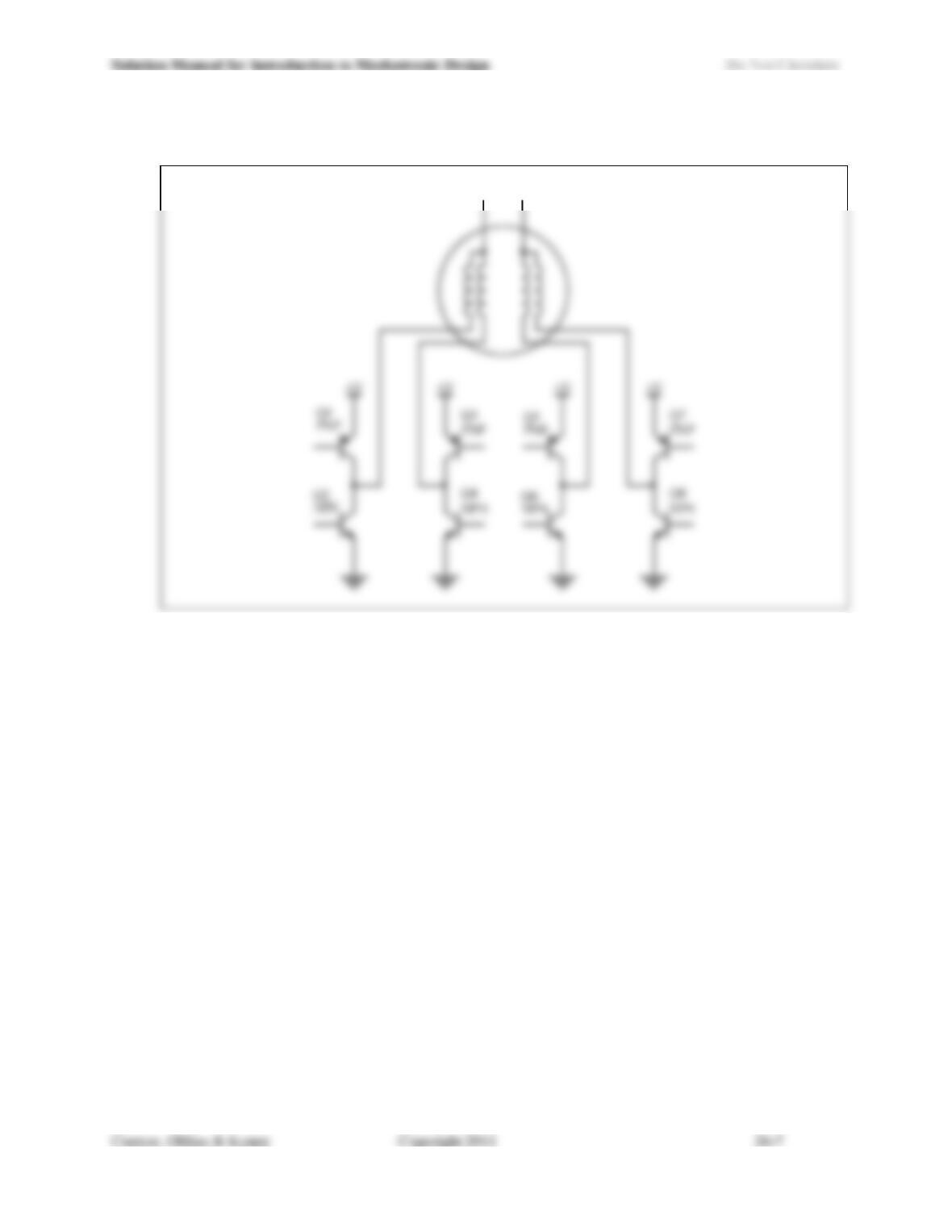
26.5) For the motor shown in Figure 26.32:
a) How many phases does the motor shown below have?
b) Is it bi-polar or uni-polar?
c) Draw a basic schematic that shows how to connect the motor. For your answer, use a representative
power supply and generic transistors.
Fig. 26.32: Motor for Problem 26.5.
a) 2 phases. (From the text, we know that its bi-filar, and though you could individually control the 4
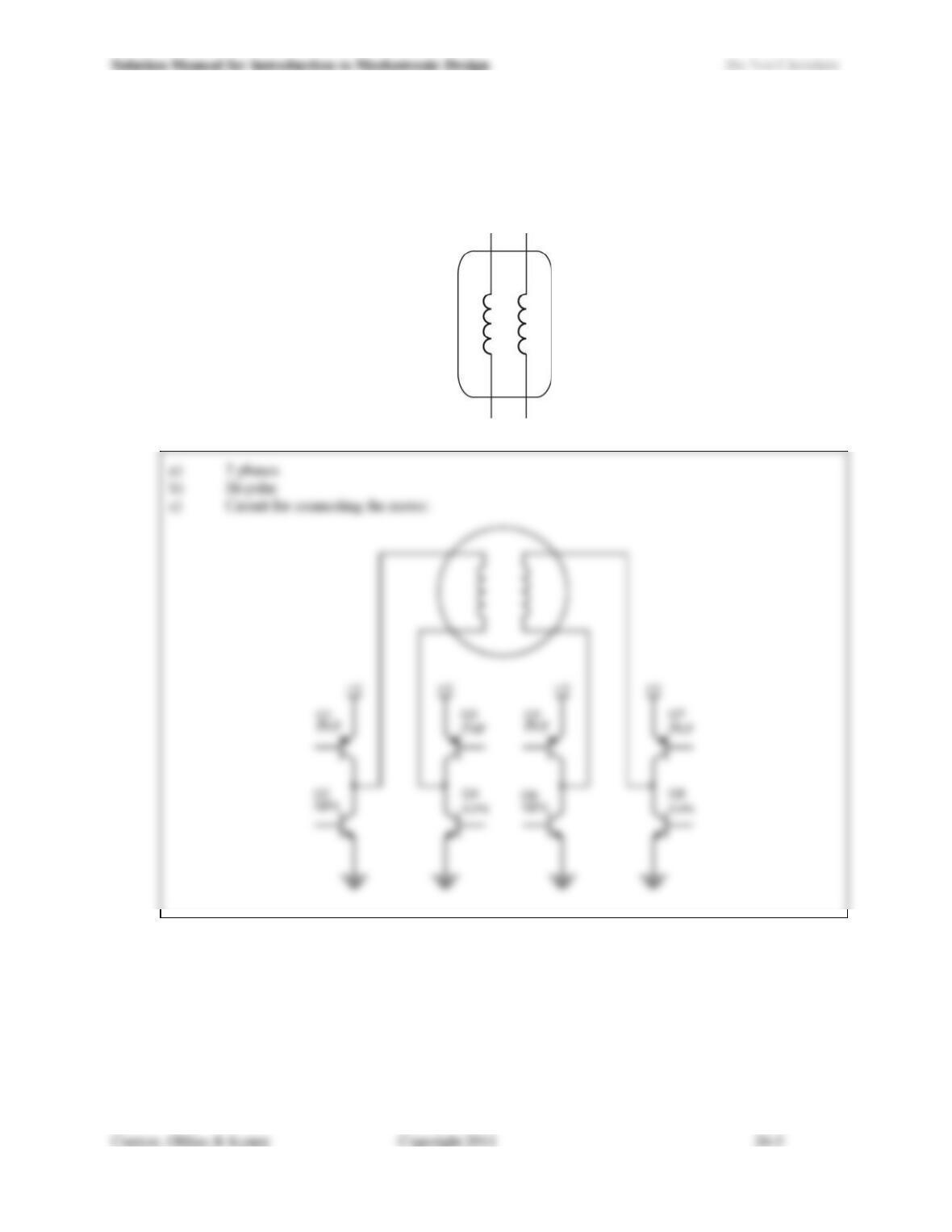
26.6) For the motor shown in Figure 26.33:
a) How many phases does the motor shown below have?
b) Is it bi-polar or uni-polar?
c) Draw a basic schematic that shows how to connect the motor. For your answer, use a representative
power supply and generic transistors.
Fig. 26.33: Motor for Problem 26.6.
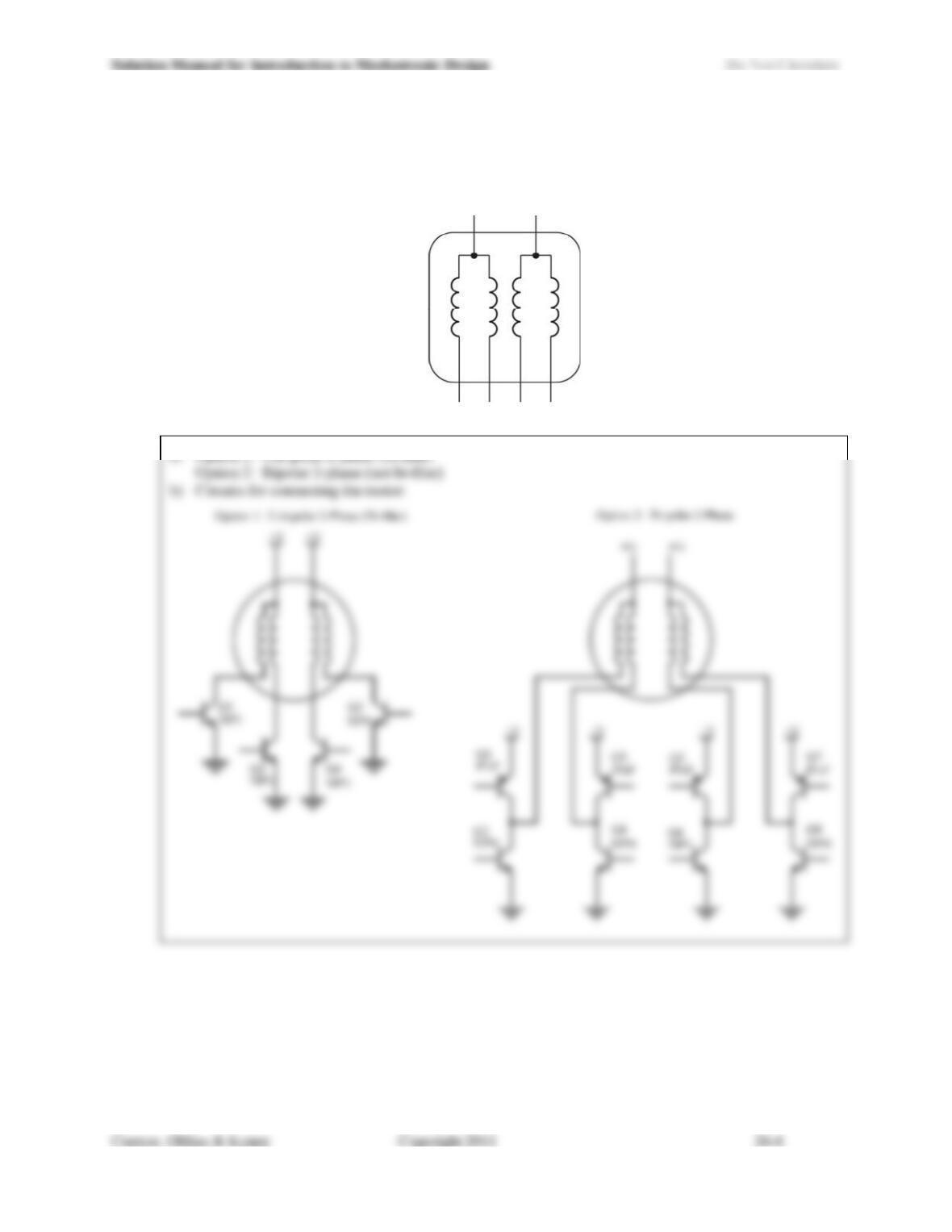
26.7) The motor shown in Figure 26.34 can be wired and used in two different configurations.
a) Describe the two different configurations (how many poles, bi– or uni-polar, bi-filar or not bi-filar)
b) Draw a basic schematic showing the two ways the motor can be wired. (For your answer, use a
representative power supply and generic transistors).
Fig. 26.34: Motor for Problem 26.7.
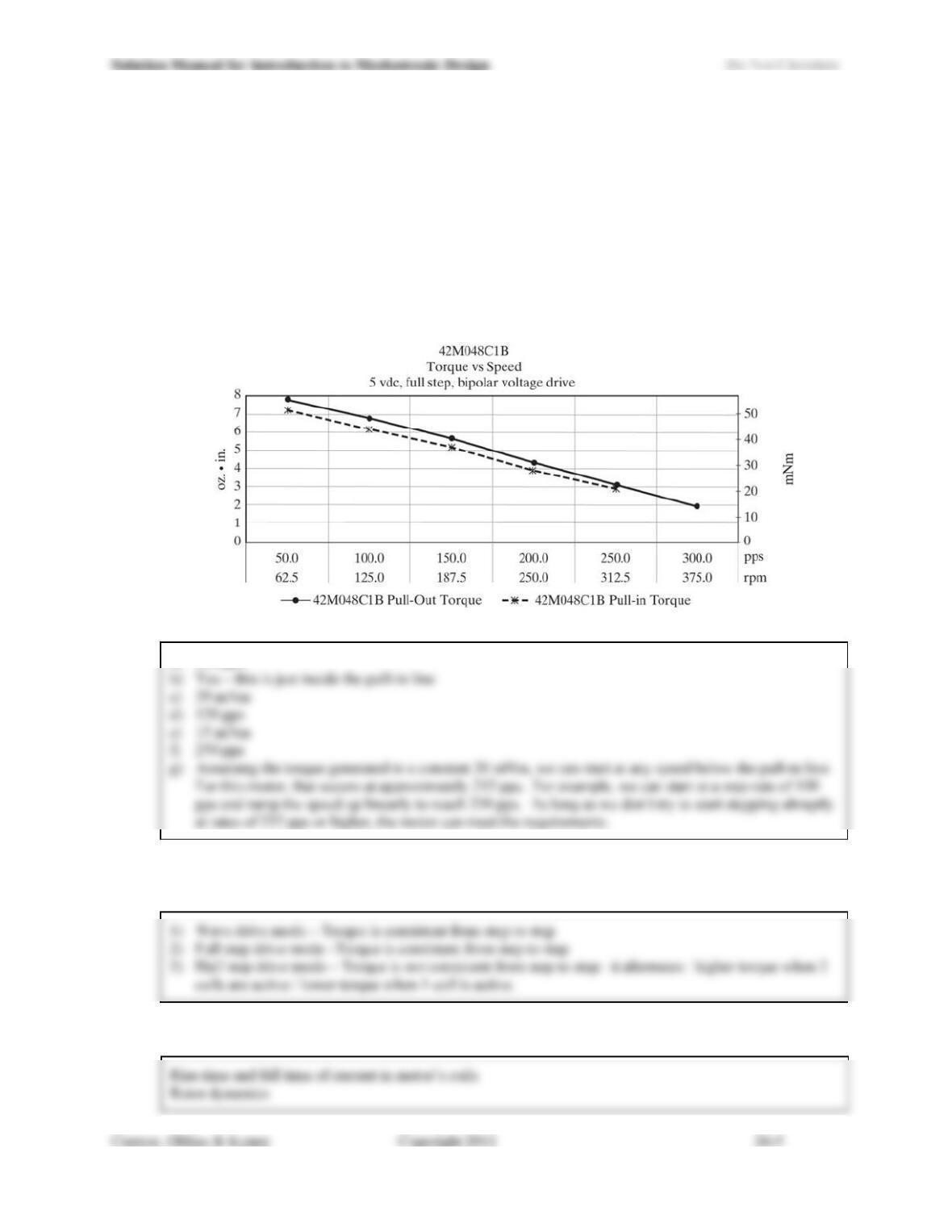
26.8) For the motor whose torque-speed characteristics are shown in Figure 26.35, answer the following
questions:
a) What is the maximum step rate?
b) If the motor is initially not rotating, will it be possible to immediately begin stepping the motor at a
rate of 200 pps (pulses per second) while generating 20 mNm of torque?
c) What is the maximum starting torque?
d) What is the fastest the motor can be stepped while generating 40 mNm of torque?
e) How much torque can the motor generate if it immediately begins stepping at 250 pps?
f) What is the maximum starting step rate?
g) A motor is required to generate 20 mNm of torque and step at a rate of 250 pps. Describe a control
scheme that allows you to achieve the desired performance.
Figure 26.35: Motor specifications for Problem 26.8. (Courtesy of Portescap.)
a) 350 pps
26.9) Name the thee types of drive modes for stepper motors. For each type of drive mode, state whether the
torque produced is consistent from step to step, or if it varies. If it varies, state why it varies.
26.10) Which motor characteristic(s) limit its maximum step rate?

26.11) The maximum step rate for a motor is related to the rate at which current begins to flow in the motors
coils and the rate at which it stops flowing. For the 1423-012-40343 motor whose specifications are given
in Fig. 26.24:
a) Calculate the characteristic rise time, , of the current in the motors coils.
b) Calculate the new value of , when you implement L/R drive by adding an external resistance of three
times the motors internal coil resistance. What drive voltage is needed to achieve the same steady–
state current that would result without L/R drive when the motor is driven with its rated voltage? How
much power is dissipated (i.e., wasted) in the external resistors?
c) If you implement chopper drive with a drive voltage that is three times the rated voltage for the motor,
how much time is required for the current to reach the level achieved in the characteristic rise time
calculated for part (a)?
a) ms
H
L08.1
027.0
c) VVV NOMCHOP 363
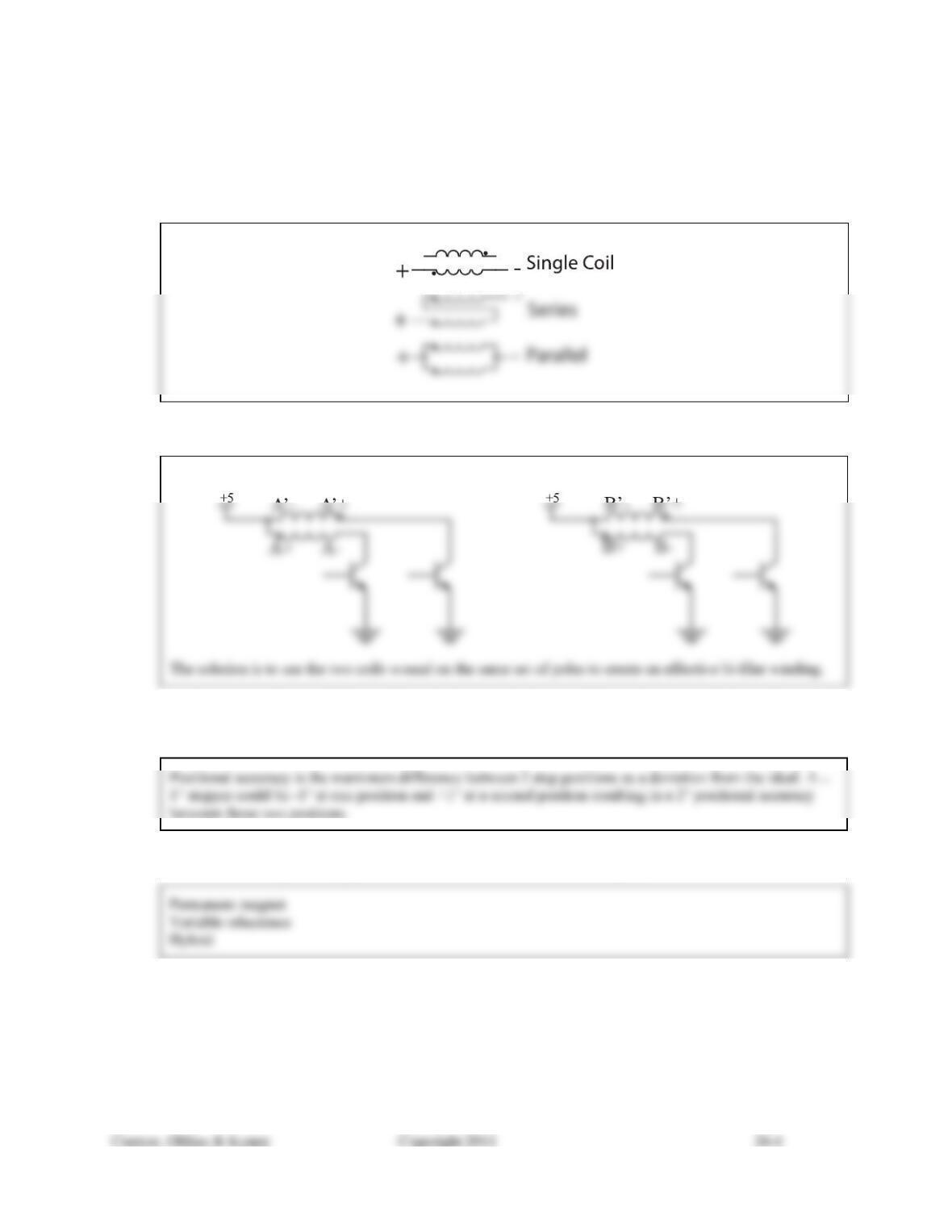
26.12) Show how you would wire the stepper motor from Fig. 26.7d to be driven using bi-polar drive.
n/c n/c