
1
CHAPTER 9
Problem 9.1
springs k1 and k2 at the two ends and subjected to dynamic
forces as shown in Fig. P9.1. The bar is constrained so that
it can move only vertically in the plane of the paper. (Note:
This is the system of Example 9.2.) Formulate the
Figure P9.1
1. Determine the force vector.
Wp
t
F
H
GI
K
J
2
2
2
()
(b)
R
|
U
|
p
t
2. Determine the stiffness matrix.
Apply a unit displacement u11 with u20
and
By statics,
Similarly, apply a unit displacement u21 with u10
and identify the resulting forces and the stiffness influence
By statics,
Thus the stiffness matrix is
3. Determine the mass matrix.

2
By statics,
mm
11 mmL
21 2
Similarly, impart a unit acceleration
u21 with
u10
,
By statics,
Thus the mass matrix is
4. Write the equations of motion.
Substituting Eqs. (c), (d), and (e) in Eq. (9.2.12), with
c0, gives

3
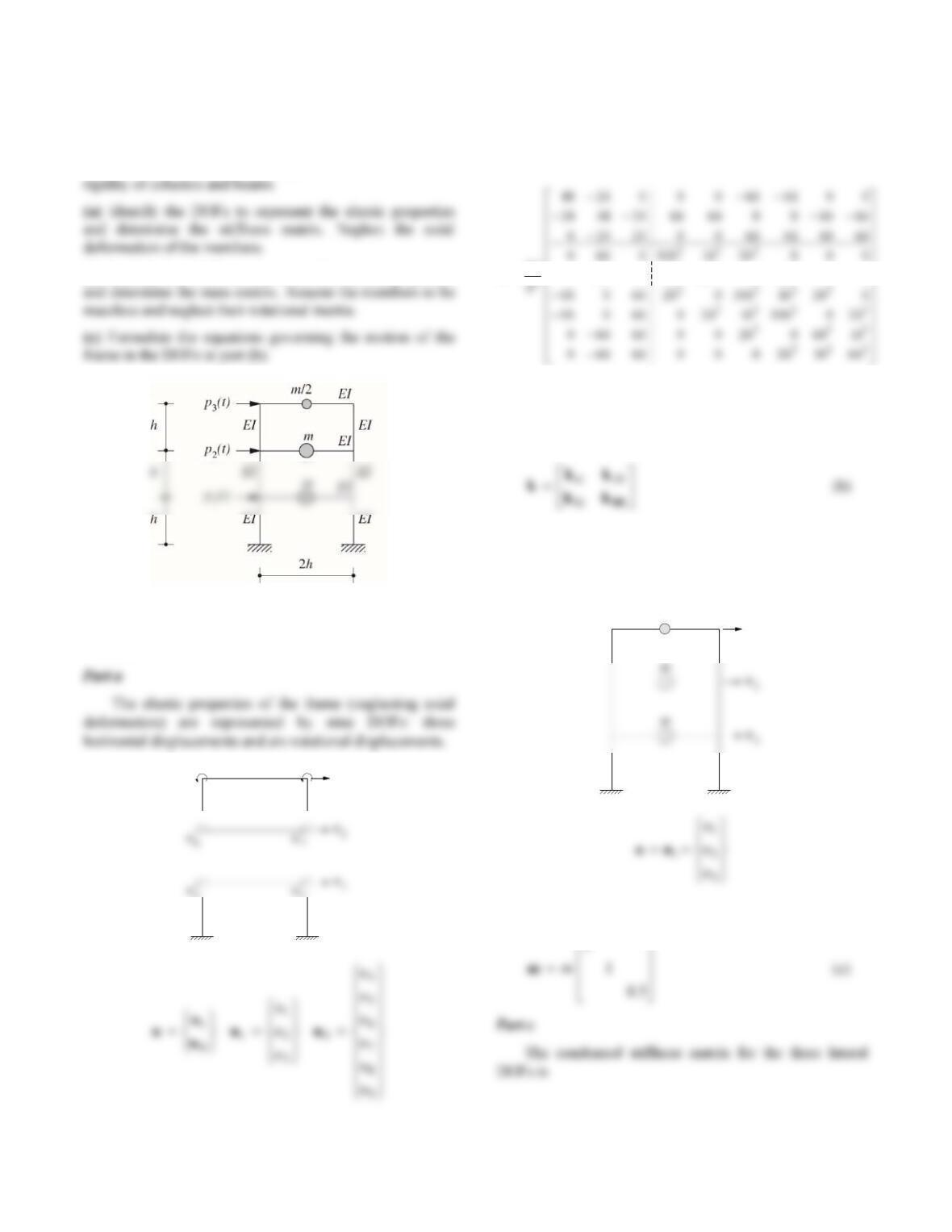
Problem 9.2
A uniform simply supported beam of length L, flexural
(b) Identify the DOFs to represent the inertial properties
and determine the mass matrix.
(c) Formulate the equations governing the translational
I
Figure P9.2
Solution:
translational displacements and four rotational
displacements.
u5u3u4u6
3
u
instance, to obtain the first column of the stiffness matrix,
k21
k11
k51
k31 k41
k61
By statics,
kEI
L
11 3
648
kE
I
L
21 3
324
k31 0
k23
k13
k53
k33 k43
k63
Other elements of the stiffness matrix are obtained
similarly. Apply a unit displacement ui1 while 0,
j
u
The complete stiffness matrix is
L
N
O
Q
LL
648 324 0 54 54 0
(a)

4
Part b
The DOF representing the inertial properties are the
two translational displacements u1 and u2 associated with
the concentrated masses.
u2
u1
To obtain the coefficients of the mass matrix for these
DOF, apply first a unit acceleration 11u
, while 20.u
u = 1,
1
u = 0
2
u = 0,
1
u = 1
2
Thus the mass matrix is
Part c
The condensed stiffness matrix for the two vertical
DOF is
The force vector is given by
mL u
u
EI
L
u
u
pt
pt
3
10
01
162
5
87
78
1
23
1
2
1
2
L
N
MO
Q
PR
S
TU
V
W
L
N
MO
Q
PR
S
TU
V
WR
S
TU
V
W
()
()
(f)

5
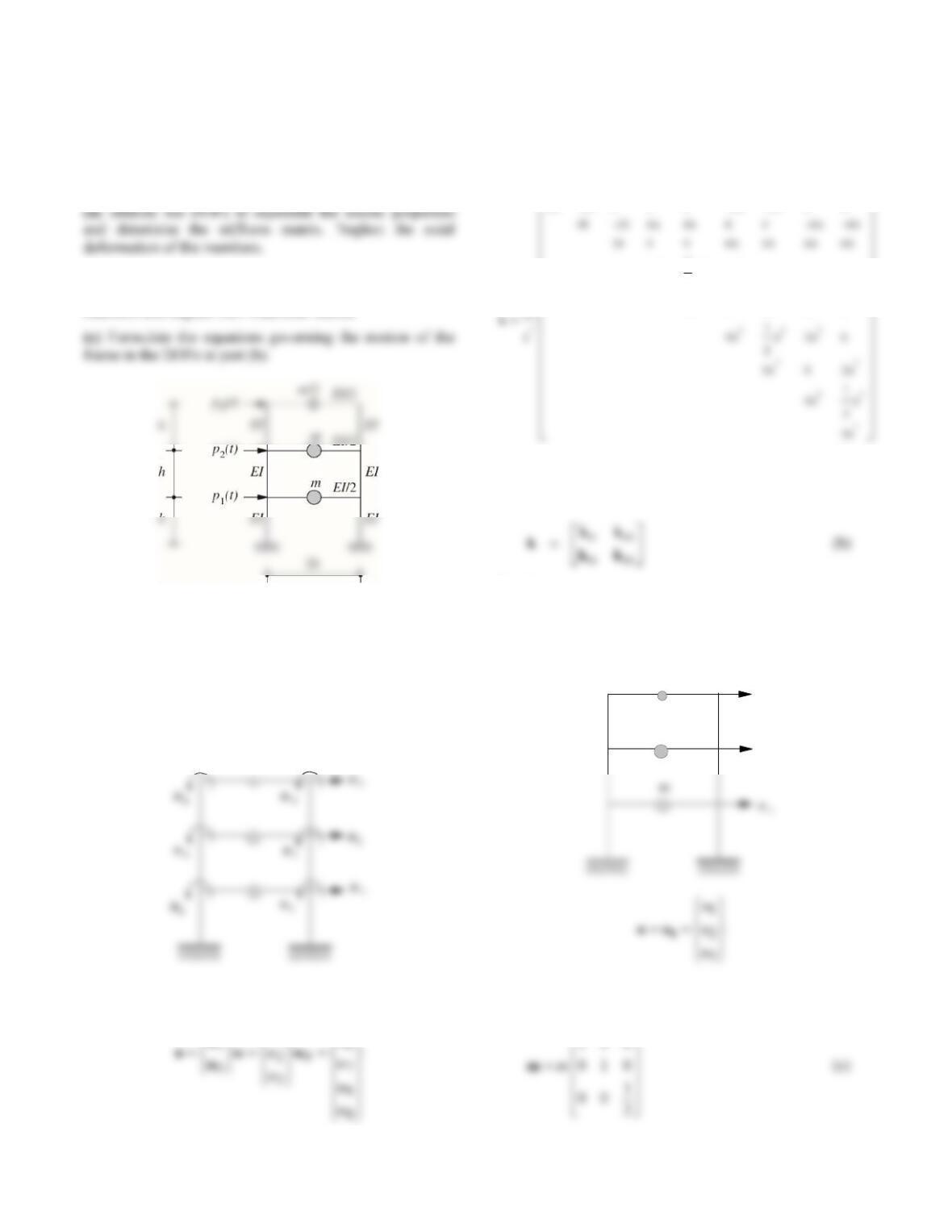
Problem 9.3
Derive the equations of motion of the beam of Fig. P9.2
governing the translational displacements u1 and u2 by
p (t)
1
p (t)
2
1. Determine the stiffness matrix.
The flexibility matrix is calculated first and inverted to
obtain the stiffness matrix. The flexibility influence coef-
The deflections due to unit load at node 2 are computed to
obtain the other two influence coefficients:
Thus the flexibility matrix is
The stiffness matrix is obtained by inverting
f:
2. Determine the mass matrix.
The mass matrix for the translational DOF is same as
in Problem 9.2:
3. Write the equations of motion.
Using Eqs. (d) and (e), the equation governing the
translational motion of the beam is the same as in Problem
9.2:
(f)

6
Problem 9.4
1. Determine the mass matrix.
2
By statics,
inertia forces.
m22
u = 1
2
By statics,
2. Determine the flexibility matrix.
Apply a unit force p11 along DOF 1 with p20
along DOF 2. The first two displacements or influence
Similarly, apply a unit force p21, with p10
. The
The stiffness matrix is computed by inverting the
flexibility matrix
f:

7
Problem 9.5
Using the definition of stiffness and mass influence coef-
Figure P8.18
Solution:
k = – k
21
Thus, the stiffness matrix is
2. Determine the mass matrix.
Apply
u11
,
u20
Apply
u21
,
u10
m12 0
mm
22 2
Thus, the mass matrix is
3. Write the equations of motion.

8
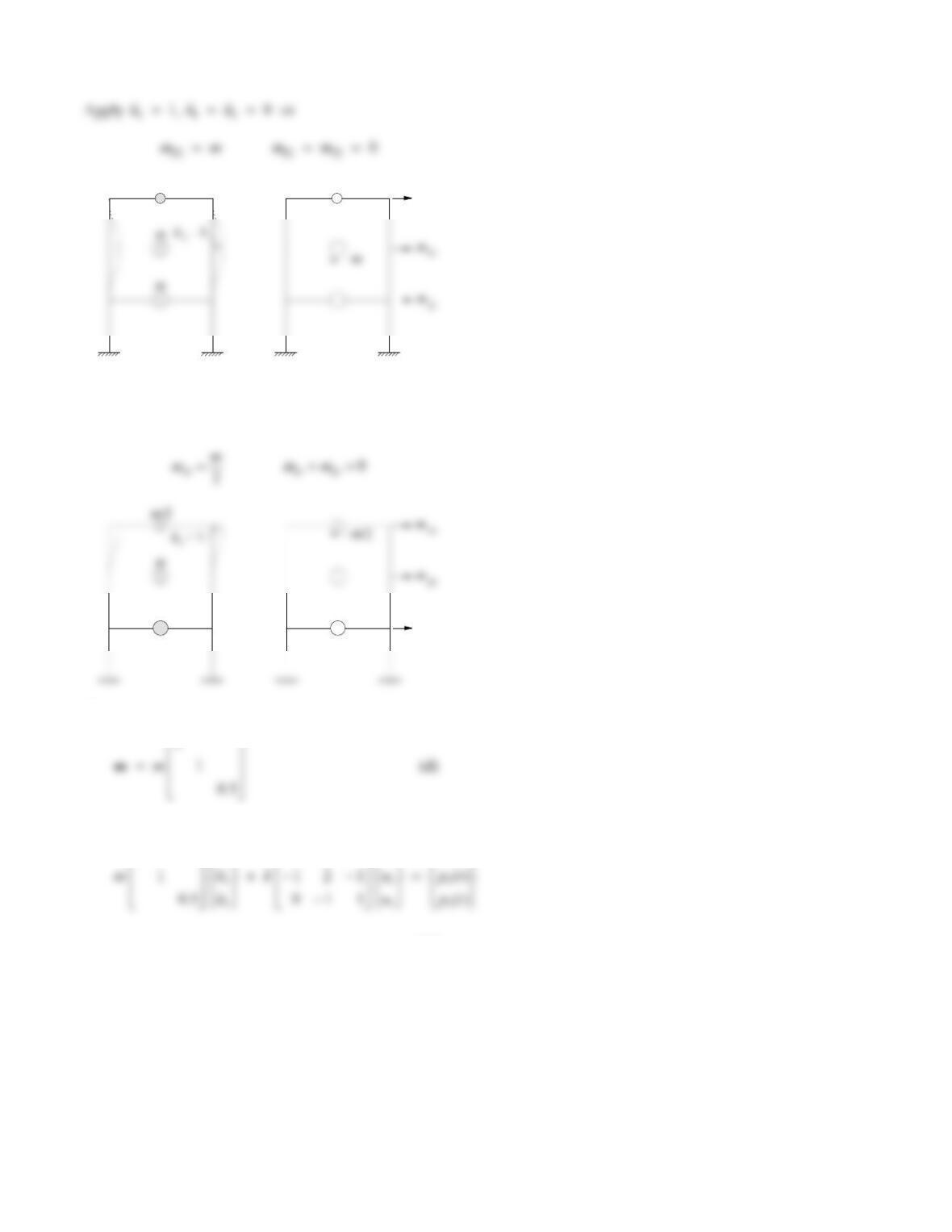
Problem 9.6
mations in all elements.
(c) Formulate the equations governing the motion of the
frame in the DOFs in part (b).
Solution:
Part a
The elastic properties of the shear frame (neglecting
u3
u4
u1
The complete stiffness matrix is
L
O
hh
48 24 0 0 6 6
This matrix can be written in partitioned form as follows:
Part b
The DOFs representing the inertial properties are the
two translational displacements u1 and u2.
Part c
The condensed stiffness matrix is

9
Problem 9.7
Solution:
Since the beams are rigid in flexure and axial defor-
stiffness are:
EI
Apply 11u, 23
0uu
and determine ki1:
k = 0
31
Apply 21u
, 13
0uu
and determine 2i
k:
k = – k
12
u = 1
3
k =
k
33
12 1
k
k (c)
2. Determine the mass matrix.
m/2
m31
10
m/2
m32
Apply 31u
, 12
0uu
m
m13
The mass matrix is
3. Write the equations of motion.
111
1210()
uupt
(e)

11
Problem 9.8
Using the definition of stiffness and mass influence coef-
ficients, formulate the equations of motion for the three-
Figure P9.8
Solution:
Since the beams are rigid in flexure and axial defor-
mation is neglected in columns, the three floor displace-
ments are the three DOFs. The floor masses and story
stiffnesses are:
h
hk
1. Determine the stiffness matrix.
Apply uuu
123
10, and determine ki1:
Apply uuu
213
10
, and determine ki2:
The stiffness matrix is
025
2. Determine the mass matrix.
11 21 31 0
k = – k
32
k = – k
23
k = 0
13
m/2
m31

12
Apply ,
uuu
213
10
mm mm
22 12 32 0
Apply ,
uuu
312
10
The mass matrix is
001
3. Write the equations of motion.
u = 1
m/2
m32
u = 1
3
m/2
m33
m/2
13
Problem 9.9
Figure P9.9 shows a three-story frame with lumped masses
subjected to lateral forces, together with the flexural
(b) Identify the DOFs to represent the inertial properties
Figure P9.9
Solution:
u3
u8u9
The coefficients of the stiffness matrix corresponding to
these DOFs are computed following Example 9.7. The
complete stiffness matrix is
222
0020101060
hhhh
EI
k
(a)
The stiffness matrix can be written in partitioned form as
follows:
Part b
The DOFs representing the inertial properties are the
three translational displacements, u1, u2, and u3.
u3
m/2
The mass matrix is

14
The equation governing the translational motion of the
building is
(e)
15
Problem 9.10
Figure P9.10 shows a three-story frame with lumped
masses subjected to lateral forces, together with the
flexural rigidity of columns and beams.
(b) Identify the DOFs to represent the inertial properties
and determine the mass matrix. Assume the members to be
massless and neglect their rotational inertia.
Figure P9.10
Solution:
Part a
The elastic properties of the frame (neglecting axial
deformation) are represented by nine DOFs: three
horizontal displacements and six rotational displacements.
5
4
1
u
u
u
u
u
The coefficients of the stiffness matrix corresponding to
these DOFs are computed following Example 9.7. The
complete stiffness matrix is
222
22
48 24 0 0 0 6 6 0 0
1
92000
2
90200
hh
hhh
hh
EI
(a)
The stiffness matrix can be written in partitioned form
as follows:
Part b
The DOFs representing the inertial properties are the
three translational displacements, 12 3
and,, .uu u
The mass matrix is
m/2
m
u
2
u
3

16
Part c
The condensed stiffness matrix for the three lateral
DOFs is
39.38 22.69 5.486
The equations governing the translational motion of the
building are
(e)

17
Problem 9.11
Figure P9.11 shows a three-story frame with lumped
masses subjected to lateral forces, together with the
deformation of the members.
(b) Identify the DOFs to represent the inertial properties
Figure P9.11
Solution:
Part a
The elastic properties of the frame (neglecting axial
deformation) are represented by nine DOFs: three
horizontal displacements and six rotational displacements.
5
4
u
u
u
The coefficients of the stiffness matrix corresponding to
these DOFs are computed following Example 9.7. The
complete stiffness matrix is
22 2
22
26 4 000
33
1
23
hh h
hh
Part b
The DOFs representing the inertial properties are the
three translational displacements, 12 3
and,, .uu u
1
u
u
3
u8u9
m/2
m
u
2
u
3

18
The mass matrix is
001
Part c
The condensed stiffness matrix for the three lateral
DOFs is
32.67 14.58 2.172
The equation governing the translational motion of the
building is
(e)

19
Problem 9.12
(b) Identify the DOFs to represent the inertial properties
and determine the mass matrix. Assume the members to be
massless and neglect their rotational inertia.
(c) Formulate the equations governing the motion of the
frame in the DOFs in part (b).
Solution:
E
E
m
L
E
I/2
E
I
p
t
1
( )
p
t
1
( )
u3
u8u9
4
5
1
u
u
uu
The coefficients of the stiffness matrix corresponding to
these DOFs are computed following Example 9.7. The
complete stiffness matrix is
23
3
23 4
22
33
14 1 2
22 2
3
333
40 16 0 2 2 4 4 0 0
000
0
hh hh
hh
EI
hhh
h
k
The stiffness matrix can be written in partitioned form as
follows:
Part b

20
m/2
u
3
The mass matrix is
100
Part c
The condensed stiffness matrix for the three lateral
DOFs is
The equation governing the translational motion of the
building is
(e)