Unlock document.
This document is partially blurred.
Unlock all pages and 1 million more documents.
Get Access

CHAPTER 4
Problem 4.2-1: Program to calculate longitudinal modes from
stability derivatives.
The following program calculates the longitudinal modes
exactly as described in Section 4.2 in connection with Table
4.2-1. It requires a trim file, made with program TRIM, for the
specified flight condition.
% Program to solve Probs. 3.7-3 & 4.2-1, 20 April 2004

A= [XV+XTV*CALP XA -G*CGAM 0;
ZV-XTV*SALP ZA -G*SGAM VT+ZQ;
0 0 0 1;

-------------------------
Problem 4.2-2: Program to calculate lateral modes from stability
derivatives.
The following program duplicates Example 4.2-1, exactly as
described in the text.
% Program to solve Problem 4.2-2

%sig2=sig1;
sig2= Ipxx*Ipxz/Delt;
A=[Yb/VT, G*cgam/VT, Yp/VT, (Yr/VT - 1);
0 0 cgam/ctta sgam/ctta;

--------------------------
Problem 4.4-1: Effect of flight condition on the aircraft
dynamics.
More specific information can be obtained from the transfer
functions and modal properties in Section 4.2. Eqns. 4.2-11 and
4.2-12 show that the short-period frequency and damping will both
have decreased because of the reduction in air density. Eqn. 4.2-

(b) The feedback arrangement is shown in Fig. 4.4-1, and the
actuator and alpha filter are given in Ex. 4.4-1. Remembering
that the alpha feedback affects mainly the frequency, and the
pitch-rate feedback the damping, it is quite easy to adjust the
feedback gains to give the same short-period mode as in Ex. 4.4-1.
Thus, kα=0.58, kq=0.335 give the pitch-rate transfer function:
%Problem 4.4-1
A= [-5.9172E-03 8.8482 -32.170 -3.5136E-01;
[z,p,k]=ss2zp(acl,kq*b,c(2,:),0)
-------------------------

Prob. 4.4-2: F-16 model lateral-directional stability augmenta-
tion.
(a) Determine and identify the modes.
From the A-matrix the modes are found to be:
(b) Gains for lateral-directional augmentation
An increasing amount of washed-out yaw-rate feedback causes
the dutch-roll damping to quickly increase, and the natural
frequency to slowly decrease. Roll-rate feedback has very little
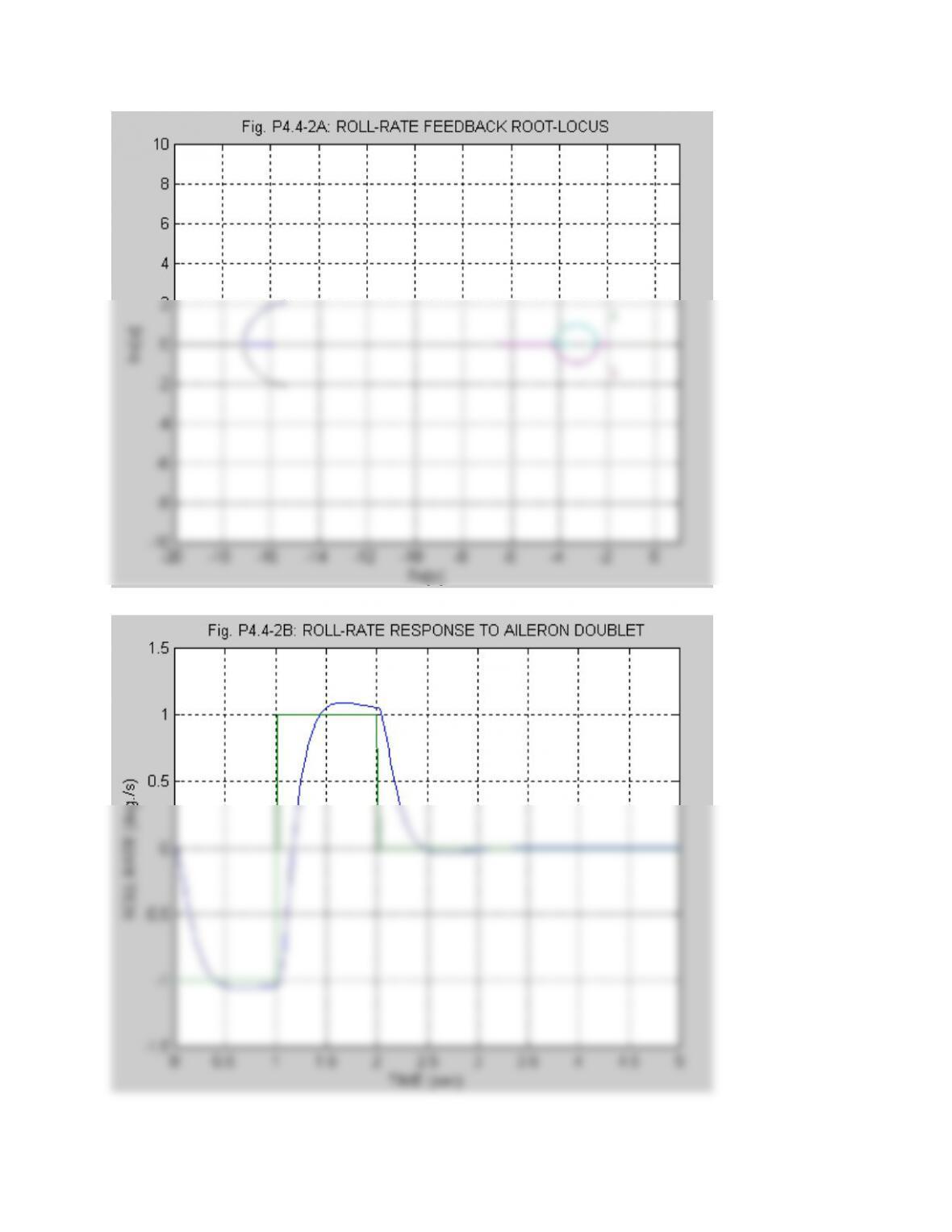

(c) Roll-rate response to an aileron doublet.
The code for the feedback design and the aileron-doublet
simulation is shown below, and the doublet response is shown in
Fig. P4.4-2B. Because of the higher-dynamic-pressure flight
conditions, the doublet response is much faster than that in Ex.
4.4-3, and follows the doublet quite closely.
% Problem 4.4-2
clear all
aw=[-1]; bw=[0 1]; cw=[0; -1]; dw=[1 0; 0 1];
wash=ss(aw,bw,cw,dw);
sys2= series(sys1,wash);
[a,b,c,d]=ssdata(sys2); % u1=ail, u2=rdr, y1=p, y2=washed-r

%end
-----------------------
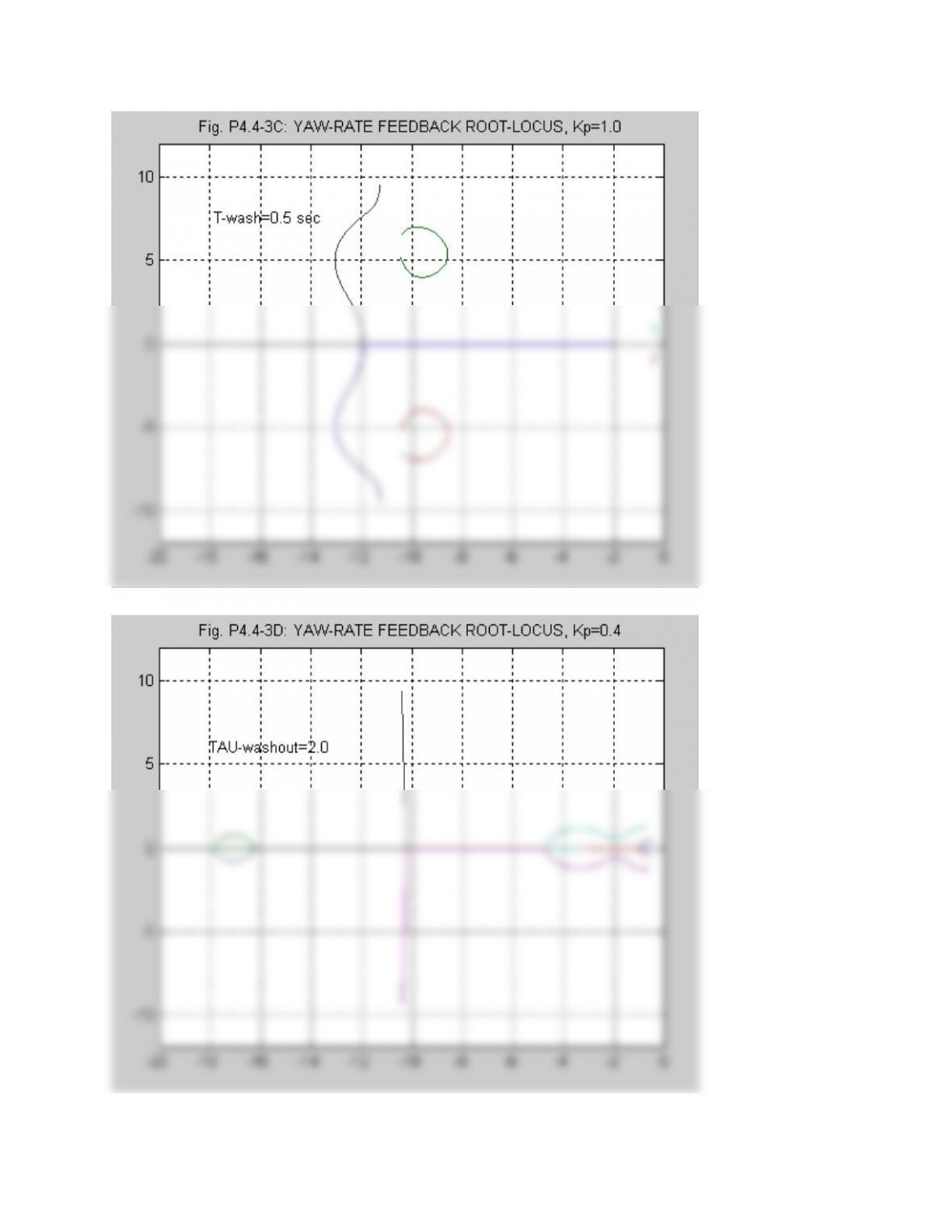
Prob. 4.4-3: Use Ex. 4.4-3 to examine the effects of the washout
pole on lateral/directional augmentation:
The roll and yaw channels interact significantly in this low
dynamic-pressure, high-alpha case. Thus, the transfer function
zeros that determine the behavior of the yaw-channel root locus
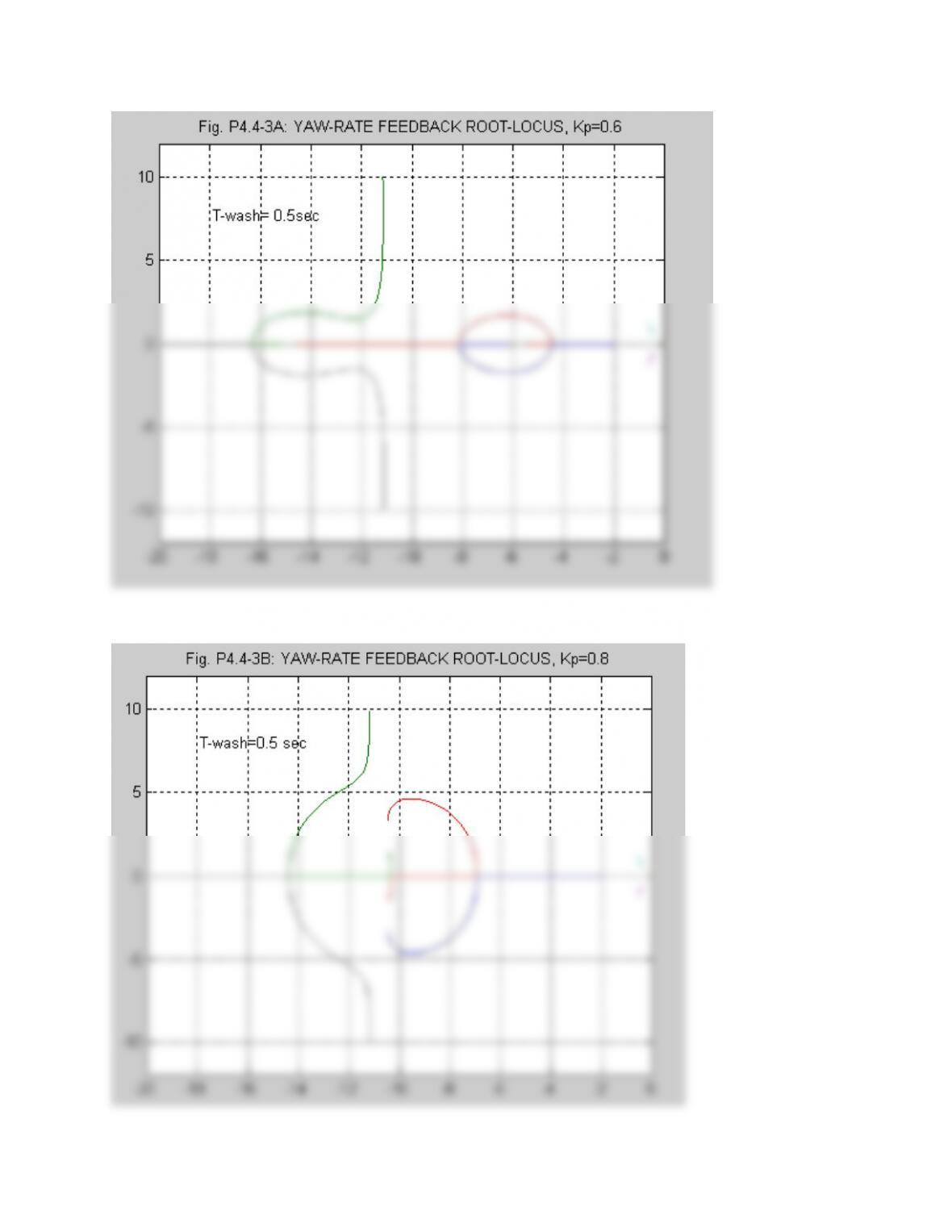

With still larger kp (kp0.8), and high-frequency complex
zeros, the complex pole-pair formed by the washout and roll
subsidence poles move near these complex zeros, as do the complex
pair formed by the two actuator poles. One of the pairs then goes
slower real pole.
For low values of kp the root-locus plot with τw=2 may differ
from the form of the plots shown above, the washout pole can
combine with the roll pole to form a complex pair that move toward
------------------
Prob. 4.4-4: Pitch SAS with lag-compensator using P4.4-1 dynamics.

alpha feedback, choose a lag compensator that cancels the Tθ2 zero
and creates a new zero farther left, as in Ex. 4.4-2, for example,
As in Ex. 4.4-1, the root-locus plot for pitch-rate feedback shows
the short-period roots circling around the compensator zero, and
having higher natural frequency for a given amount of alpha
feedback. For example, kα= 0.1, kq= 0.2 gives a fast pitch-rate
--------------------
4.5-1 Pitch-rate CAS: re-design Ex. 4.5-1 (new flight condition).
The new flight condition has the same dynamic pressure and
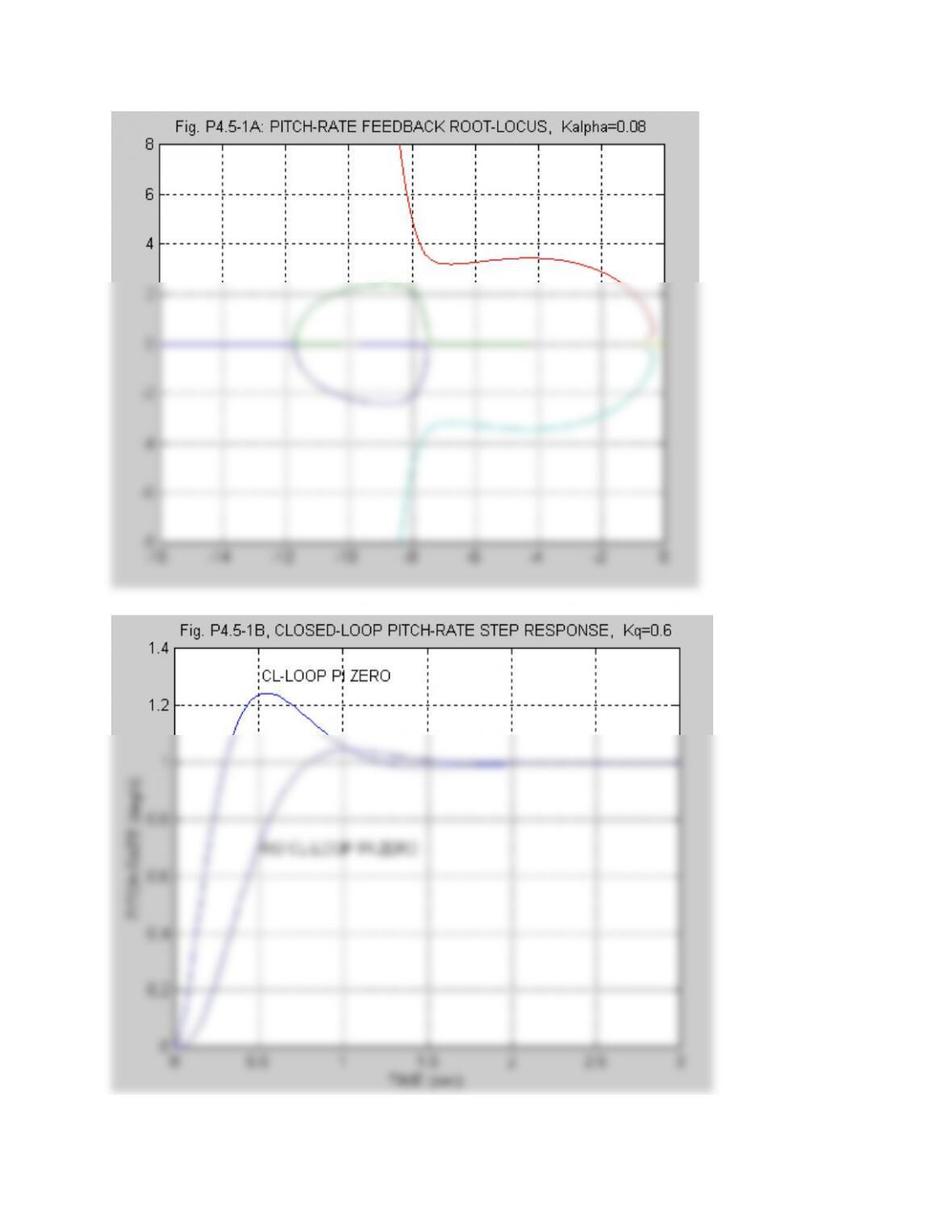

as Ex. 4.5-1, shows different behavior for larger values of
proportional gain, kp. However, at small values of kp the pole
-----------------
4.5-2 Normal acceleration CAS with accelerometer at cg.
We use the dynamics given in Ex. 4.5-2, with the an equation
to pitch rate, with no feedback operating are:
For the normal-acceleration transfer function, the static-loop-
sensitivity is negative and so the zero-angle root-locus rules
will apply. A root-locus sketch for the q/u transfer function
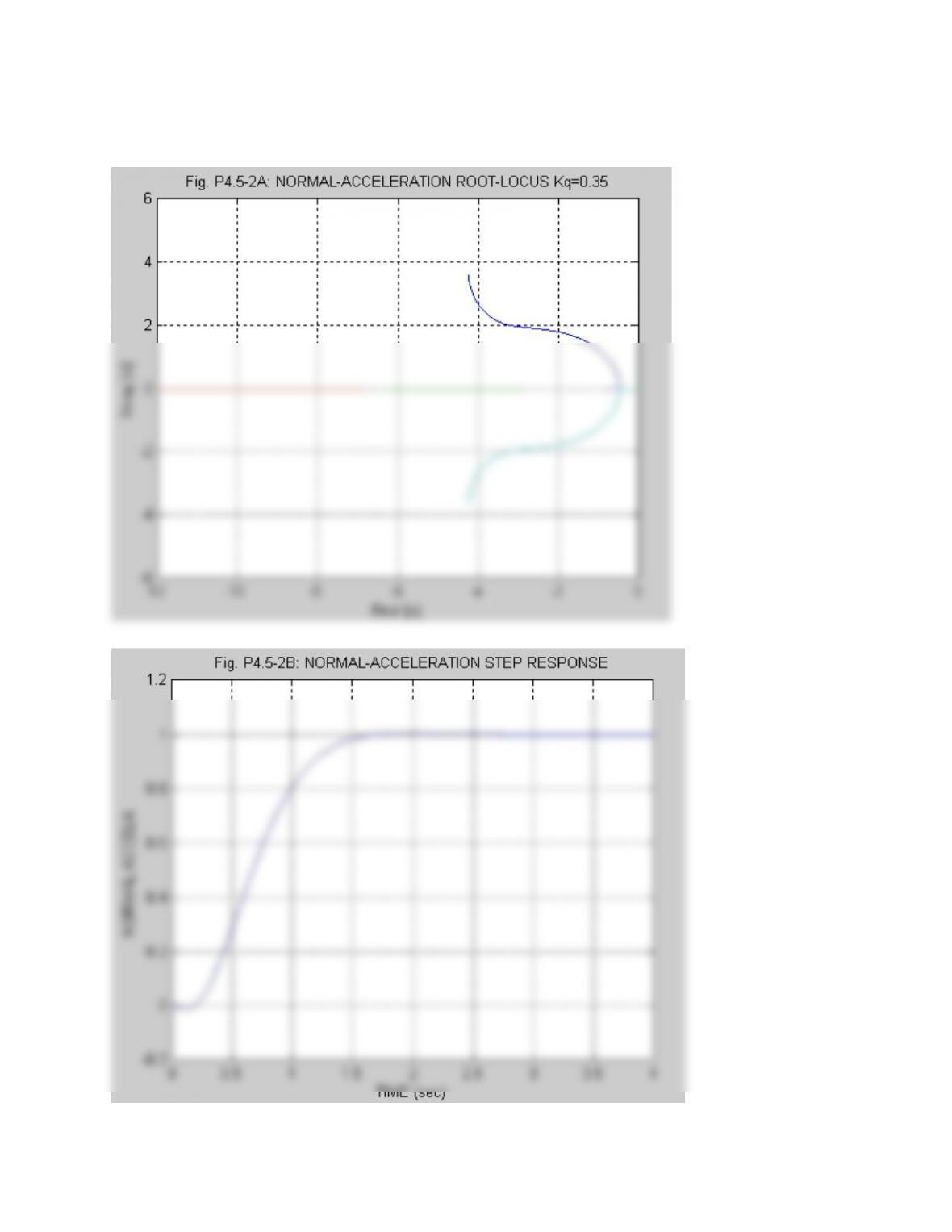
acceleration step response.

Fig. P4.5-2A shows a root-locus plot for an/e, with kq=0.35,
and the compensator zero at s=-1.8. Note that, as required, the
-----------------------
**Problem 4.5-3: Re-state the problem as: "Use the linear dynamics
from Examples 4.5-1 and 4.5-3 to repeat the simulation given in
Ex. 4.7-2." This problem should probably be considered as a
problem for Section 4.7.
The method of solution chosen here is:

transfer functions (3) and (4) given in Ex. 4.5-3, and against Ex.
4.5-1 (add an output for lateral acceleration). Confirm that:
(iv) Paste the closed-loop matrices (ACL and BCL) into a new file,
P453.m, and add the linear state equations:
x
. = ACL(x-x0) + BCL(u-u0)
with additional equations:
x
Now use NLSIM to perform a simulation using the state equations in
P453.m. An initial condition file can be obtained by examining
the block diagram with all integrator inputs set to zero, or by
making a cost function and using the TRIM program.

% Aileron Rudder
Blat= [ 2.9506E-04 8.0557E-04;
0.0000E+00 0.0000E+00;
function [xd]= F16afcs(time,x,u)
% Closes the controller loops around the linear model equations.
%global ay
xd=zeros(14,1);
function [xd]=P453(time,x,u)
% Closed-loop F-16 and controller linear dynamics








