*21–20.
SOLUTION
Ans.=0.148 kg #m2
=0+0.16875(0.8660)2+0.084375(–0.5)2–0–0–0
Iy¿=Ixux
2+Iyuy
2+Izuz
2–2Ixy uxuy–2Iyz uyuz–2Izx uzux
uz=cos (30° +90°) =-0.5
ux=cos 90° =0, uy=cos 30° =0.8660
Iy=1
2(15)(0.15)2=0.16875 kg #m2
Ix=Iz=1
4(15)(0.15)2=0.084375 kg #m2
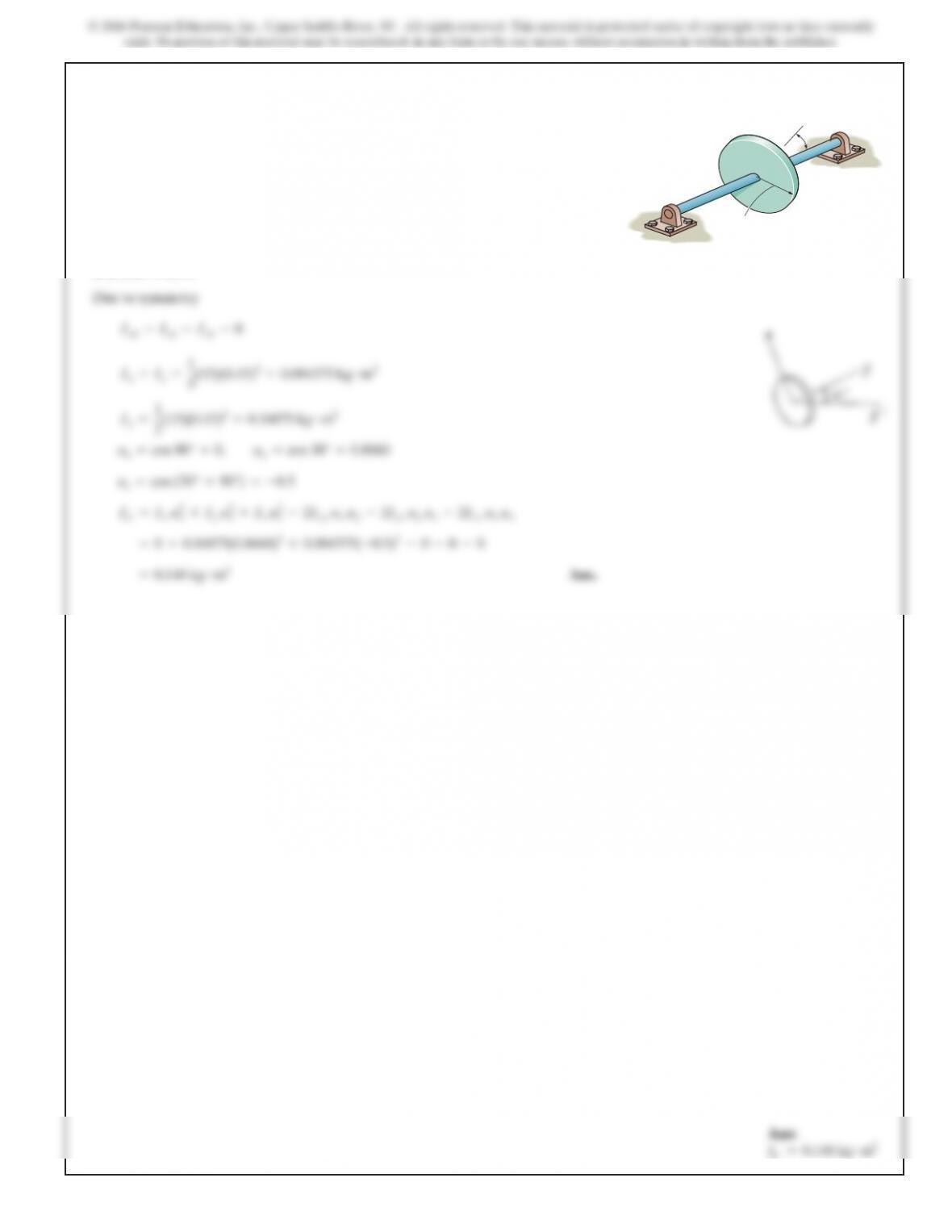
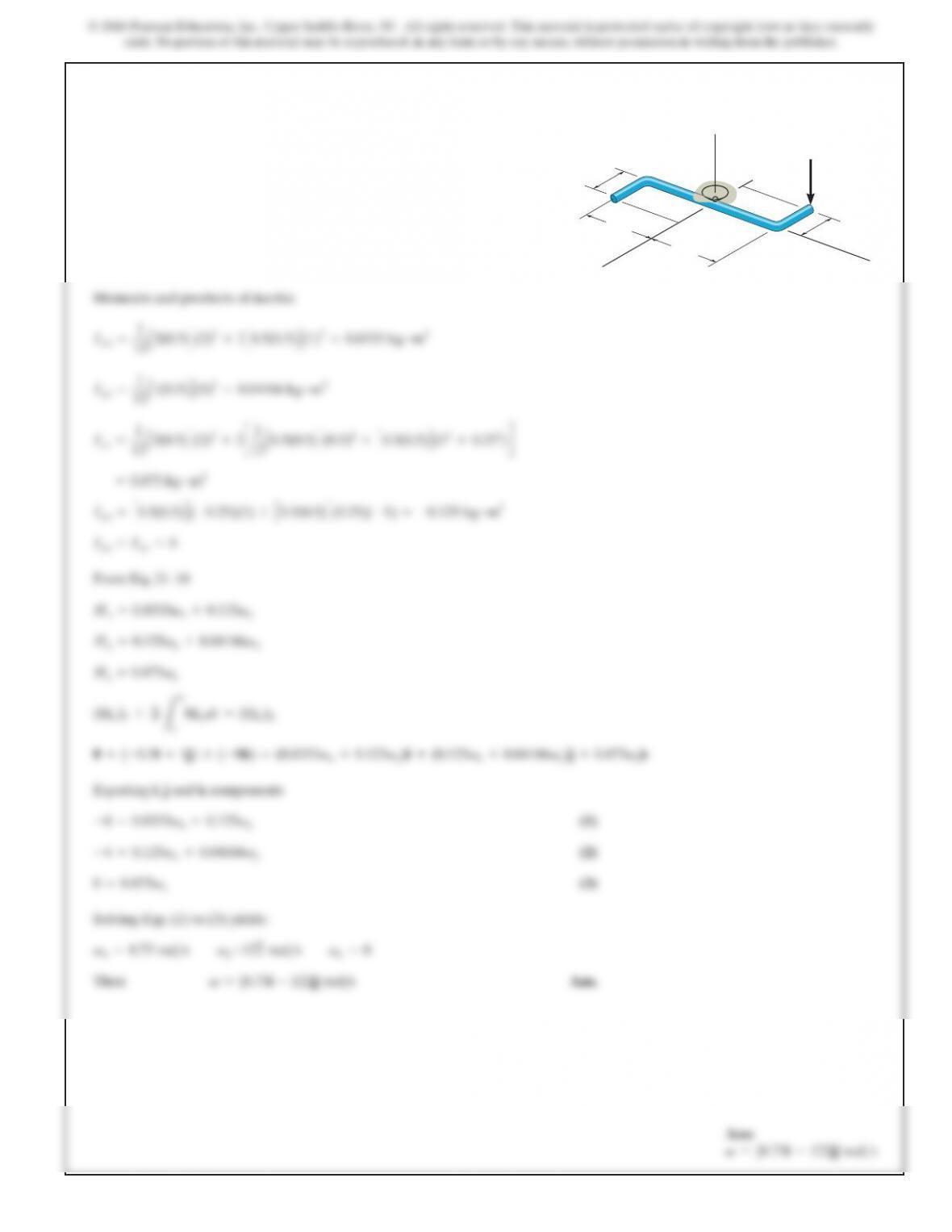
Determine the moment of inertia of the disk about the axis
of shaft AB. The disk has a mass of 15 kg.
30°B
150 mm
A
21–21.
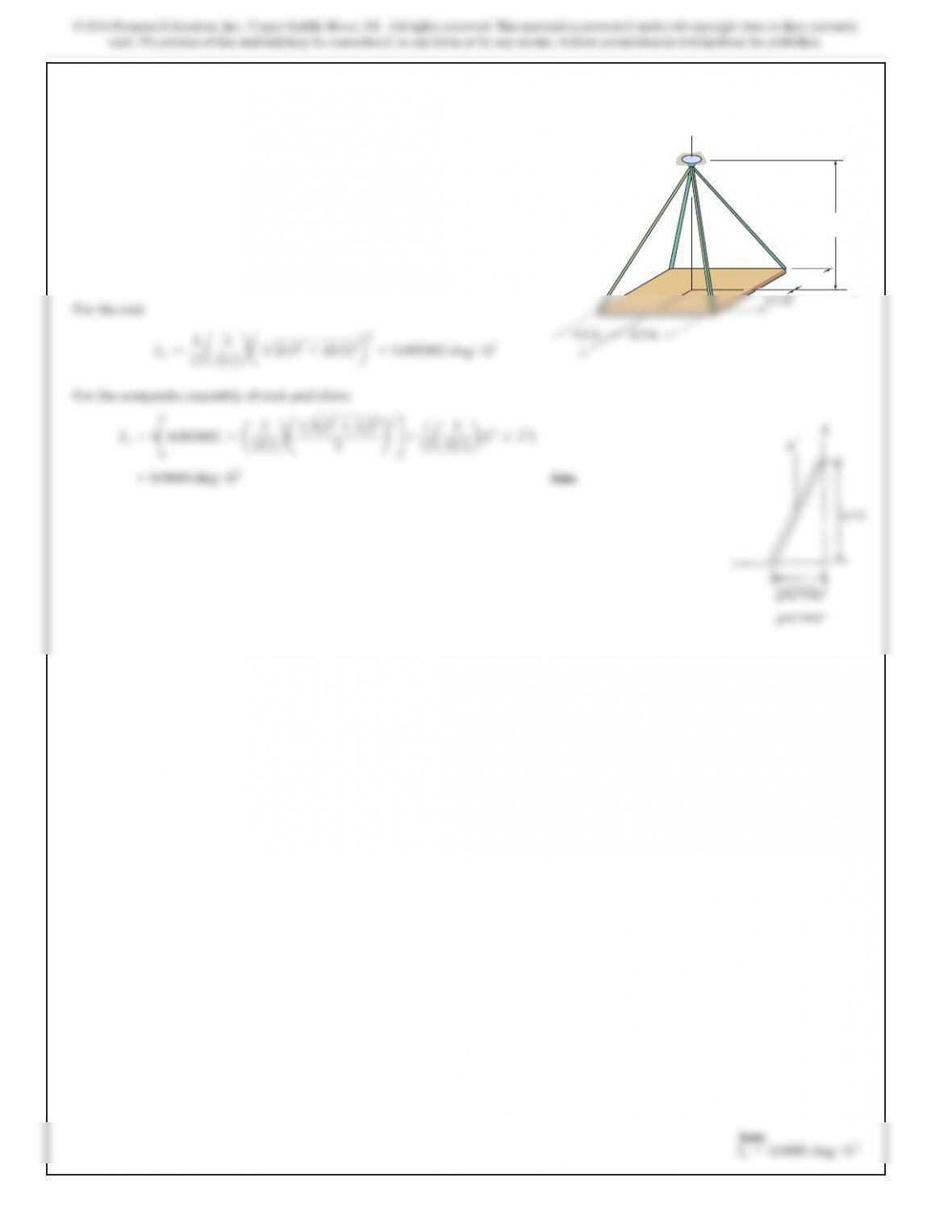
The thin plate has a weight of 5 lb and each of the four rods
weighs 3 lb.Determine the moment of inertia of the assembly
about the zaxis.
SOLUTION
For the composite assembly of rods and disks:
Ans.=0.0880 slug #ft2
Iz=4
B
0.003882 +a3
32.2 b
¢
20.52+0.52
2
≤
2
R
+1
12 a5
32.2 b(12+12)
12 a3
32.2 ba2(0.52+(0.5)2b2
y
z
0.5 ft
1.5 ft
1131
21–22.
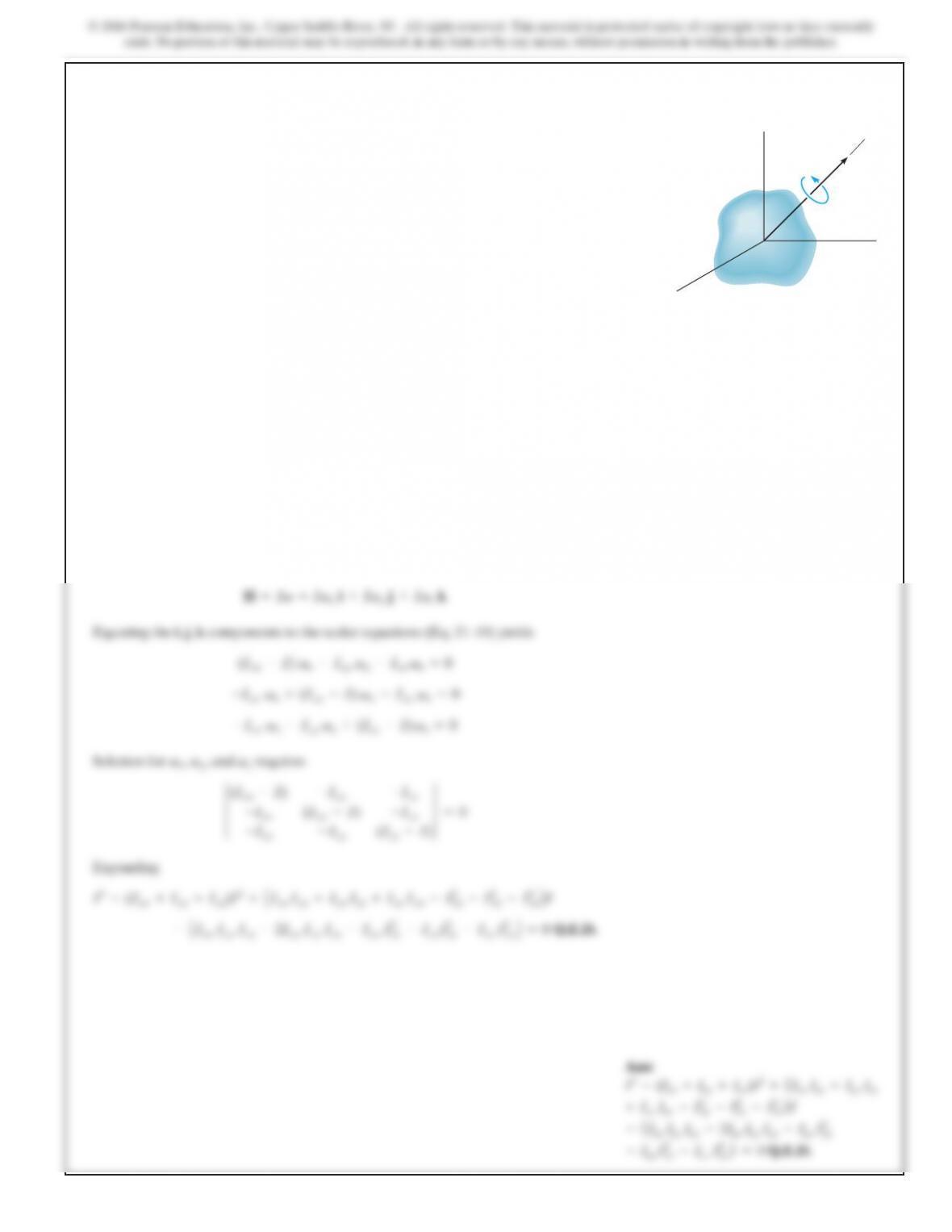
If a body contains no planes of symmetry,the principal
moments of inertia can be determined mathematically.To
show how this is done,consider the rigid body which is
spinning with an angular velocity ,directed along one of its
principal axes of inertia. If the principal moment of inertia
about this axis is I,the angular momentum can be expressed
as .The components of H
may also be expressed by Eqs.21–10, where the inertia tensor
is assumed to be known. Equate the i,j,and kcomponents of
both expressions for Hand consider ,,and to be
unknown. The solution of these three equations is obtained
provided the determinant of the coefficients is zero.Show
that this determinant, when expanded, yields the cubic
equation
The three positive roots of I, obtained from the solution of
this equation, represent the principal moments of inertia
,,and .Iz
Iy
Ix
–IyyI2
zx –IzzI2
xy)=0
–(IxxIyyIzz –2IxyIyzIzx –IxxI2
yz
+(IxxIyy +IyyIzz +IzzIxx –I2
xy –I2
yz –I2
zx)I
I3–(Ixx +Iyy +Izz)I2
vz
vy
vx
H=IV=Ivxi+Ivyj+Ivzk
V
SOLUTION
Equating the i,j,kcomponents to the scalar equations (Eq. 21–10) yields
Solution for ,,and requires
Expanding
Q.E.D.–
A
Ixx Iyy Izz –2Ixy Iyz Izx –Ixx I2
yz –IyyI2
zx –Izz I2
xy
B
=0
I3–(Ixx +Iyy +Izz)I2+
A
Ixx Iyy +Iyy Izz +Izz Ixx –I2
xy –I2
yz –I2
zx
B
I
3(Ixx –I)–Ixy –Ixz
–Iyx (Iyy –I)–Iyz
–Izx –Izy (Izz –I)3=0
vz
vy
vx
–Izx vz–Izy vy+(Izz –I)vz=0
–Ixx vx+(Ixy –I)vy–Iyz vz=0
(Ixx –I)vx–Ixy vy–Ixz vz=0
H=Iv=Ivxi+Ivyj+Ivzk
y
V
z
x
O

1132
21–23.
Since and from Eq. 21–8
Q.E.D.=(rG>A*mvG)+HG
=rG>A*(vA+(v*rG>A))m+HG
HA=(rG>A*vA)m+HG+rG>A*(v*rG>A)m
HG=L
m
rG*(v*rG)dm
L
m
rGdm =0
+aL
m
rGdmb*(v*rG>A)+rG>A*av*L
m
rGdmb+rG>A*(v*rG>A)L
m
dm
=aL
m
rGdmb*vA+(rG>A*vA)L
m
dm +L
m
rG*(v*rG)dm
=aL
m
(rG+rG>A)dmb*vA+L
m
(rG+rG>A)*
C
v*rG+rG>A)
D
dm
t
.
vG=vA+V:RG>A
hat by definition of the mass center and
1RGdm =0
into Eq. 21–6 and expanding,noting RA=RG+RG>A
RA
RG
RG/A
GP
A
y
Y
Zz
Show that if the angular momentum of a body is
determined with respect to an arbitrary point A, then
can be expressed by Eq. 21–9. This requires substituting
HA

*21–24.
v1 10 rad/s
150 mm
y
x
z
O
T
he 15-kg circular disk spins about its axle with a constant
an
gular velocity of . Simultaneously, the yoke
i
s rotating with a constant angular velocity of .
Determine
the angular momentum of the disk about its
center of ma
ss O, and its kinetic energy.
v2=5 rad>s
v1=10 rad>s
SOLUTION
T
he mass moments of inertia of the disk about the x,y,and zaxes are
Due to
symmetry,
Here
, the angular velocity of the disk can be determined from the vector addition of
and .Thus,
s
o that
S
ince the disk rotates about a fixed point O, we can apply
Hx=Ixvx=0.084375(0) =0
vz=5 rad>svy=-10 rad>svx=0
v=v1+v2=[–10j+5k] rad>s
v2
v
1
Ixy =Iyz =Ixz =0
Iy=1
2 mr2=1
2 (15)(0.152)=0.16875 kg #m2
Ix=Iz=1
4 mr2=1
4 (15)(0.152)=0.084375 kg #m2
1134
21–25.
Kinematics:
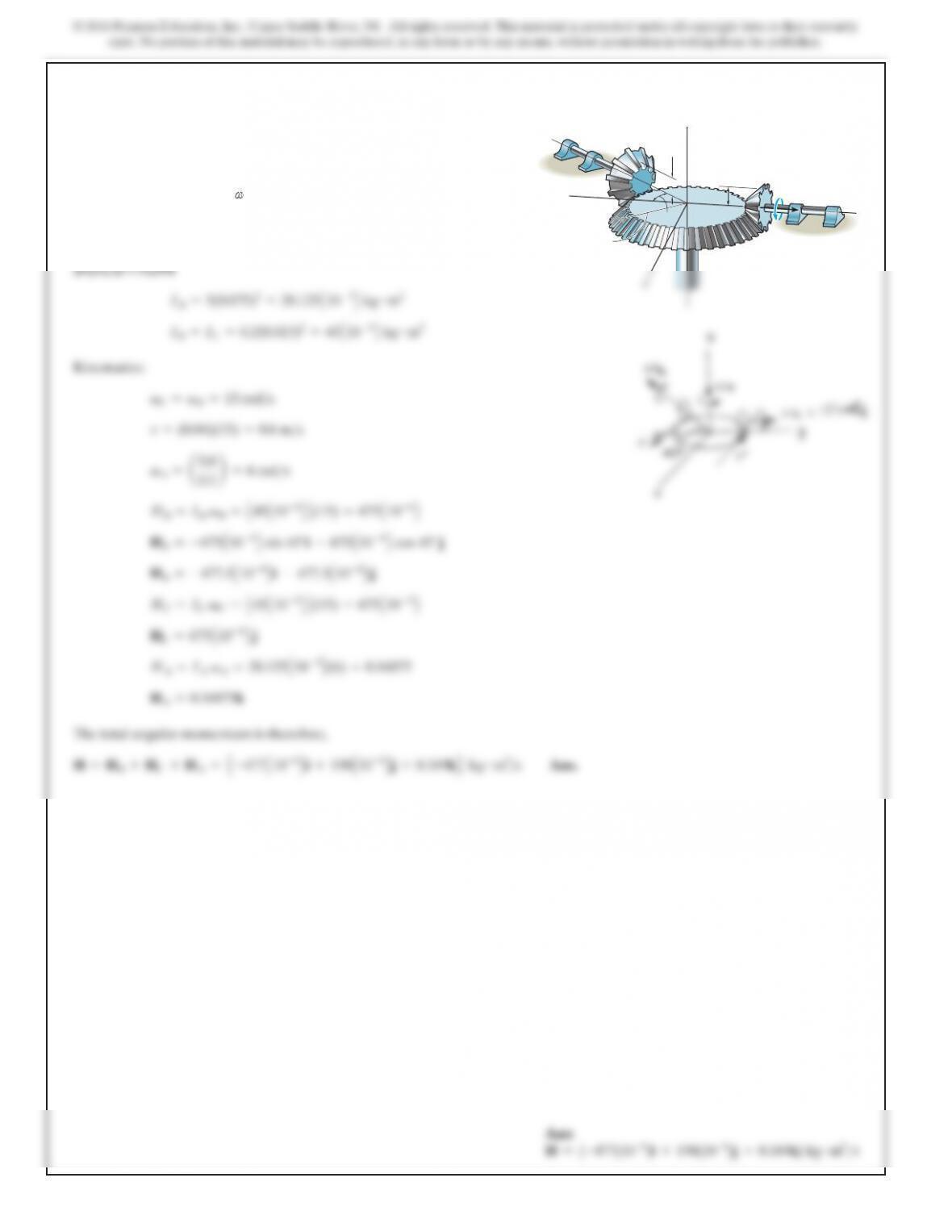
The total angular momentum is therefore,
Ans.H =HB+HC+HA=–477 10–6i+198 10–6j+0.169kkg #m2s
HA=0.16875k
HA=IAvA=28.125
A
10–3
B
(6) =0.16875
HC=675
A
10–6
B
j
HC=ICvC=
A
45
A
10–6
BB
(15) =675
A
10–6
B
HB=-477.3
A
10–6
B
i–477.3
A
10–6
B
j
HB=-675
A
10–6
B
sin 45°i–675
A
10–6
B
cos 45° j
HB=IBvB=
A
45
A
10–6
BB
(15) =675
A
10–6
B
vA=a0.6
0.1 b=6 rad>s
v=(0.04)(15) =0.6 m>s
vC=vB=15 rad>s
IB=IC=0.2(0.015)2=45
A
10–6
B
kg #m2
200 g and a radius of gyration about the axis of their
connecting shaft of 15 mm. If the gears are in mesh and C
has an angular velocity of , determine the
total angular momentum for the system of three gears about
point A.
C={15j} rad>s
C
={15j} rad/s
40 mm
40 mm
100 mm C
A
45°
z
y
B
v
ω
The large gear has a mass of 5 kg and a radius of gyration
of kz = 75 mm. Gears B and C each have a mass of

1135
21–26.
The circular disk has a weight of 15 lb and is mounted on
the shaft AB at an angle of 45° with the horizontal.
Determine the angular velocity of the shaft when if
a constant torque is applied to the shaft. The
shaft is originally spinning at when the torque
is applied.
v1=8 rad>s
M=2lb#ft
t=3s
SOLUTION
For x’ axis
Principle of impulse and momentum:
Ans.v2=61.7 rad/s
0.1118(8) +2(3) =0.1118 v2
(Hx¿)1+©
LMx¿dt =(Hx¿)2
=0.1118 slug #ft2
=0.1491(0.7071)2+0.07453(0.7071)2+0–0–0–0
Iz¿=Ixu2
x+Iyu2
y+Izu2
z–2Ixy uxuy–2Iyz uyuz–2Izx uzux
uz=cos 90° =0
ux=cos 45° =0.7071
uy=cos 45° =0.7071
Ix=1
2
A
15
32.2
B
(0.8)2=0.1491 slug #ft2
Iy=Iz=1
2
A
15
32.2
B
(0.8)2=0.07453 slug #ft2
v1 8 rad/s
BA
45
0.8 ft
M
Ans:
v
2=61.7 rad>s

1136
21–27.
SOLUTION
For x’ axis
Principle of impulse and momentum:
Ans.v2=87.2 rad/s
0.1118(8) +L2
0
4e0.1 tdt =0.1118v2
(Hx¿)1+©
LMx¿dt =(Hx¿)2
=0.1118 slug #ft2
=0.1491(0.7071)2+0.07453(0.7071)2+0–0–0–0
Iz¿=Ixu2
x+Iyu2
y+Izu2
z–2Ixy uxuy–2Iyz uyuz–2Izx uzux
uz=cos 90° =0
ux=cos 45° =0.7071
uy=cos 45° =0.7071
Ix=1
2
A
15
32.2
B
(0.8)2=0.1491 slug #ft2
Iy=Iz=1
4
A
15
32.2
B
(0.8)2=0.07453 slug #ft2
The circular disk has a weight of 15 lb and is mounted on
the shaft AB at an angle of 45° with the horizontal.
Determine the angular velocity of the shaft when if
a torque where tis in seconds, is applied
to the shaft. The shaft is originally spinning at
when the torque is applied.
v1=8 rad>s
M=14e0.1t2lb #ft,
t=2s v1 8 rad/s
BA
45
0.8 ft
M
Ans:
v
2=87.2 rad>s
*21–28.
The rod assembly is supported at Gby a ball-and-socket
joint. Each segment has a mass of 0.5 kg/m. If the assembly
is originally at rest and an impulse of is
applied at D, determine the angular velocity of the
assembly just after the impact.
I=5–8k6N#s
SOLUTION
From Eq. 21–10
Equating i,jand kcomponents
(1)
(2)
(3)
Solving Eqs. (1) to (3) yields:
Ans.Then v={8.73i–122j} rad s
vx=8.73 rad svy–122
–rad s vz=0
0=0.875vz
–4=0.125vx+0.04166vy
–8=0.8333vx+0.125vy
0+(–0.5i+1j)*(–8k)=(0.8333vx+0.125vy)i+(0.125vx+0.04166vy)j+0.875vzk
(HG)1+©
Lt2
t1
MGdt =(HG)2
Hz=0.875vz
Hy=0.125vx+0.04166vy
Hx=0.8333vx+0.125vy
Iyz =Ixz =0
Ixy =
C
0.5(0.5)
D
(–0.25)(1) +
C
0.5(0.5)
D
(0.25)(–1) =-0.125 kg #m2
=0.875 kg #m2
Izz =1
12
C
2(0.5)
D
(2)2+2c1
12
C
0.5(0.5)
D
(0.5)2+
C
0.5(0.5)
D
(12+0.252)d
Iyy =1
12
C
1(0.5)
D
(1)2=0.04166 kg #m2
12
z
1m
D
1m
xy
C
G
B
A
0.5 m
0.5 m I= {–8k}N·s

1138
21–29.
The 4-lb rod AB is attached to the 1-lb collar at Aand a 2-lb
link BC using ball-and-socket joints. If the rod is released
from rest in the position shown, determine the angular
velocity of the link after it has rotated 180°.
Ans.vx=19.7 rad/s
T2=0.007764v2
x=3
T2=1
2[1
3(2
32.2)(0.5)2]v2
x+1
2[1
12(4
32.2)(1.3)2](0.3846vx)2+1
2(4
32.2)(0.25vx)2
vAB =0.5vx
1.3 =0.3846vx
T2=3
0+4(0.25) +2(0.25) =T2–4(0.25) –2(0.25)
0.5 m
1.3 m
z
y
A
C
B
Ans:
v
x=19.7 rad>s
1139
21–30.
SOLUTION
Ans.h=0.1863 ft =2.24 in.
h=1
24
l2v2
g=1
24
(6)2(2)2
(32.2)
1
2c1
12
W
gl2dv2+0=0+Wh
T1+V1=T2+V2
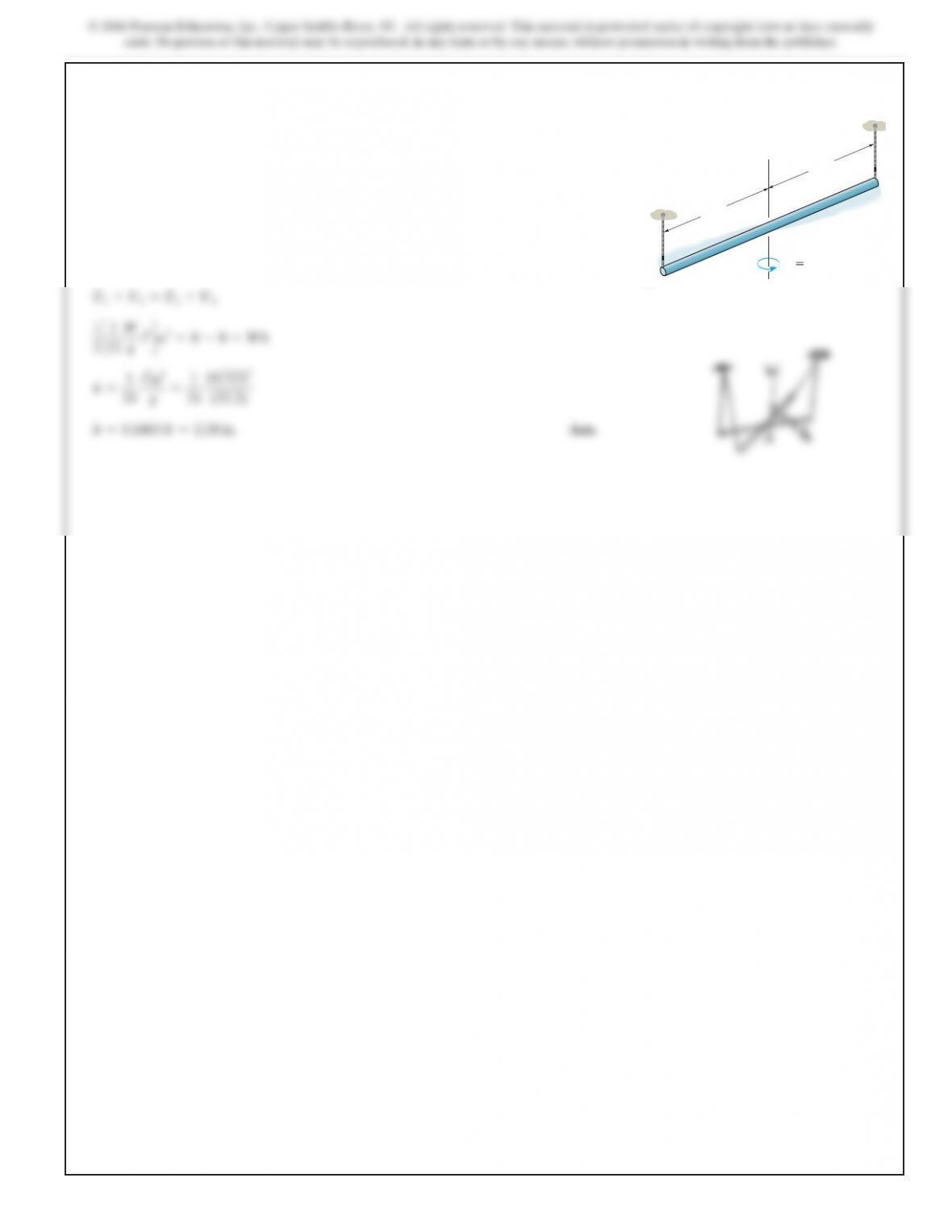
The rod weighs and is suspended from parallel cords
at Aand B. If the rod has an angular velocity of
about the zaxis at the instant shown, determine how high
the center of the rod rises at the instant the rod
momentarily stops swinging.
2 rad>s
3lb
>
ft
v 2 rad/s
3 ft
3 ft
z
A
Ans:
h=2.24 in.

21–31.
SOLUTION
Equating i, j and kcomponents
(1)
(2)
(3)
Since is perpendicular to the axis of the rod,
(4)
Solving Eqs. (1) to (4) yields:
Hence
Ans.=0.0920 ft #lb
=1
2a4
32.2 b(1.111) +1
2c1
12 a4
32.2 b
A
232+12+12
B
2d(0.4040)
T=1
2my2
G+1
2IGv2
AB
y2
G=(0.3333)2+(–1.0)2=1.111
v2
AB =0.18182+(–0.06061)2+0.60612=0.4040
={0.3333i–1.0j}ft>s
=-2j+3ijk
0.1818 –0.06061 0.6061
1.5 –0.5 –0.5 3
vG=vB+vAB *rG/B
vAB ={0.1818i–0.06061j+0.6061k} rad>svA={0.6667i}ft>s
yA=0.6667 ft>s
vx=0.1818 rad>svy=-0.06061 rad>svz=0.6061 rad>s
–3vx+1vy+1vz=0
vAB
rB/A=(vxi+vyj+vzk)(–3i+1j+1k)=0
vAB
vx+3vy=0
vx+3vz=2
vy–vz+yA=0
–2j=yAi+3ijk
vxvyvz
–31 13
vB=vA+vAB *rB/A
rB/A={–3i+1j+1k}ft
rG/B={1.5i–0.5j–0.5k}
vA=yAiv
B+{–2j}ft>svAB =vxi+vyj+vzk
The 4-lb rod AB is attached to the rod BC and collar A
using ball-and-socket joints. If BC has a constant angular
velocity of , determine the kinetic energy of AB when
it is in the position shown. Assume the angular velocity of
AB is directed perpendicular to the axis of AB.
2 rad>s
2rad/s
1ft
z
y
A
3ft
B
C
1ft
1141
*21–32.
SOLUTION
Since , then
Thus,
Ans.vy=26.2 rad s
0+2(9.81)(0.3301) =c0+1
2(0.01)(–0.96154vy)2+1
2(0.505)(0.19231vy)2d–2(9.81)(0.1602
T1+V1=T2+V2
h1=0.5 sin 41.31° =0.3301 m,
h2=0.5 sin 18.69° =0.1602 m
v=-0.96154vyj,0.19231vyk
vz=0.19612vy
0=-0.019612vz+0.1vy–0.49029vz#
0=0+
C
(0.19612vz#–vy)j+(0.98058vz#)k
D
*(0.5j–0.1k)
vC=vA+v*rC>A
vA=vC=0
=(0.19612vz–vy)j+(0.98058vz#)k
v=vy+vz=-vvj+vz#sin 11.31°j+vz#cos 11.31°k
Iy=1
2(2)(0.1)2=0.01 kg #m2
Ix=Iz=1
4(2)(0.1)2+2(0.5)2–=0.505 kg #m2
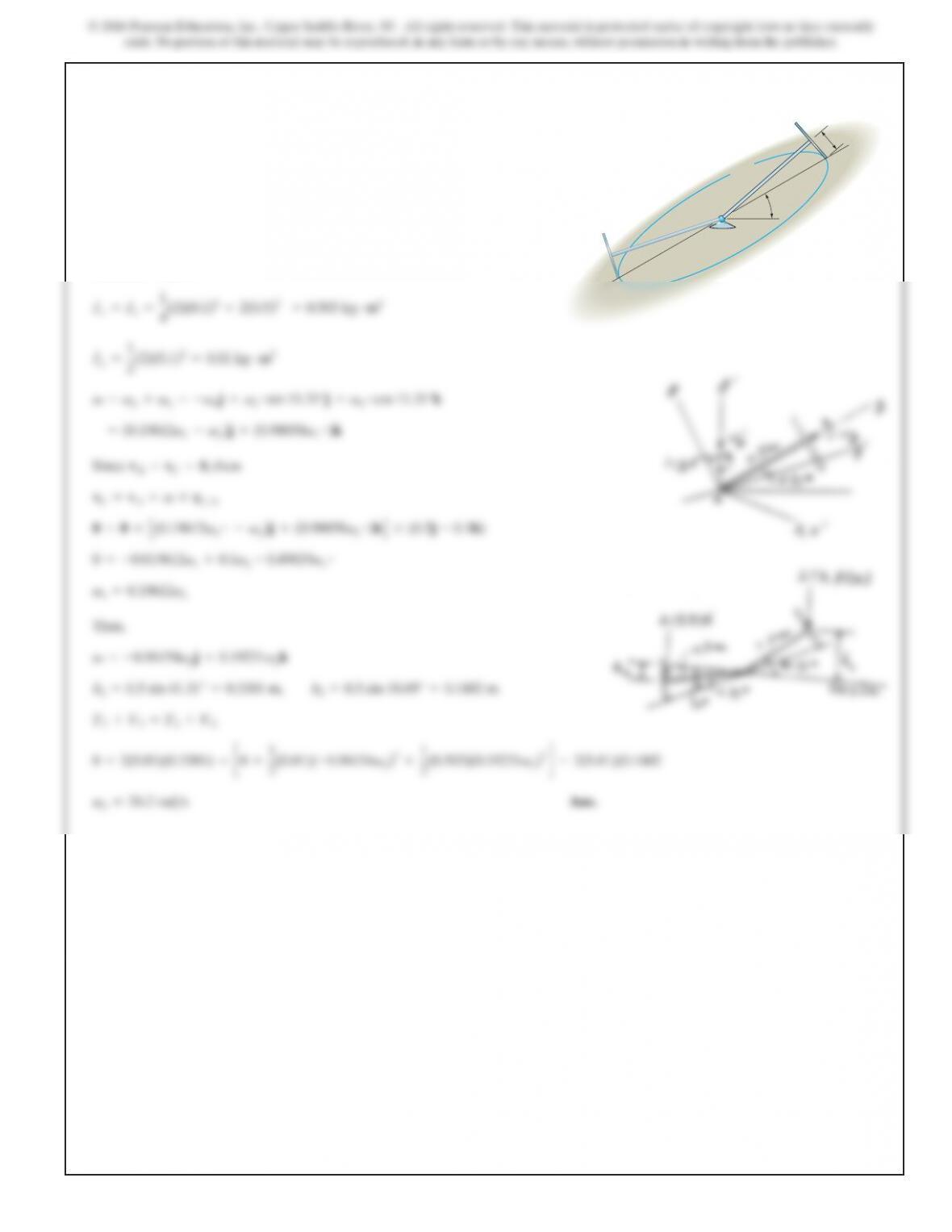
The 2-kg thin disk is connected to the slender rod which is
fixed to the ball-and-socket joint at A. If it is released from
rest in the position shown, determine the spin of the disk
about the rod when the disk reaches its lowest position.
Neglect the mass of the rod.The disk rolls without slipping.
0.1 m
30°
C
B
A
0.5 m
Ans:
vy
=26.2 rad>s

1142
21–33.
z
D
CB
E
0.1 m
0.4 m
0.3 m
vs 60 rad/s
vp
The 20-kg sphere rotates about the axle with a constant
angular velocity of .If shaft AB is subjected to
a torque of ,causing it to rotate,determine the
value of after the shaft has turned 90° from the position
shown. Initially,.Neglect the mass of arm CDE.vp=0
vp
M=50 N #m
vs=60 rad>s
SOLUTION
When the sphere is at position 1 ,Fig.a,.Thus,the velocity of its mass center is
zero and its angular velocity is .Thus,its kinetic energy at this
position is
When the sphere is at position 2 ,Fig.a,.Then the velocity of its mass
center is .Then
.Also, its angular velocity at this
position is .Thus,its kinetic energy at this position is
When the sphere moves from position 1 to position 2 ,its center of gravity raises
vertically .Thus,its weight Wdoes negative work.
Here,the couple moment Mdoes positive work.
Applying the principle of work and energy,
Ans.vp=4.82 rad
>
s
144 +25p+(–19.62) =2.54vp
2 +144
T
1+©U
1–2=T
2
U
W=Mu=50 ap
2b=25pJ
U
W=-W¢z=-20(9.81)(0.1) =-19.62 J
¢z=0.1 m
= 2.54vp
2+144
= 1
2 (20)
A
0.25vp
2
B
+1
2 (0.08)
A
vp 2
B
+1
2 (0.08)(–60)2
T=1
2 m(vG)2
2 +1
2Ix¿(v2)x¿
2 +1
2 Iy¿(v2)y¿
2 +1
2 Iz¿(v2)z¿
2
v2=vpi–60j
(vG)2
2 =(–0.4vp)2+(–0.3vp)2 =0.25vp
2
=-0.4vpj–0.3vpk(vG)2=vp*vG>C=(vpi)*(–0.3j+0.4k)
vp=vpi
= 144 J
= 0 +0+0+1
2 (0.08) (602)
T=1
2 m(vG)1
2 +1
2Ix¿(v1)x¿
2 +1
2 Iy¿(v1)y¿
2 +1
2 Iz¿(v1)z¿
2
v1=[60k] rad>s
vp=0
Ix¿=Iy¿=Iz¿=2
5 mr2=2
5 (20)(0.12)=0.08 kg #m2
Ans:
vp
=4.82 rad>s

21–34.
The 200-kg satellite has its center of mass at point G.Its radii
of gyration about the ,, axes are
,respectively.At the instant shown, the
satellite rotates about the ,and axes with the angular
velocity shown, and its center of mass Ghas a velocity of
.Determine the
angular momentum of the satellite about point Aat
this instant.
vG=5—250i+200j+120k6m>s
z¿y¿x¿,
kx¿=ky¿=500 mm
kz¿=300 mm,y¿x¿z¿
SOLUTION
Due to symmetry, the products of inertia of the satellite with respect to the ,,
and coordinate system are equal to zero.
The angular velocity of the satellite is
Thus,
Then, the components of the angular momentum of the satellite about its mass
center Gare
Thus,
The angular momentum of the satellite about point Acan be determined from
Ans.
=[–2000i–55 000j+22 500k]kg#m2/s
=(0.8k)*200(–250i+200j+120k)+(30 000i–15 000j+22 500k)
HA=rG>A*mvG+HG
HG=[30 000i–15 000j+22 500k]kg#m2>s
(HG)z¿=Iz¿vz¿=18(1250) =22 500 kg#m2>s
(HG)y¿=Iy¿vy¿=50(–300) =-15 000 kg#m2>s
(HG)x¿=Ix¿vx¿=50(600) =30 000 kg#m2>s
vx¿=600 rad>svy¿=-300 rad>svz¿=1250 rad>s
v=[600i+300j+1250k] rad>s
Ix¿y¿=Iy¿z¿=Ix¿z¿=0
z¿
y¿x¿
Iz¿=200
A
0.32
B
=18 kg#m2
Ix¿=Iy¿=200
A
0.52
B
=50 kg#m2
x
G
A
Vx¿600 rad/s
Vz¿1250 rad/s
z
,
z
¿
vG

1144
21–35.
SOLUTION
Due to symmetry, the products of inertia of the satellite with respect to the ,,
and coordinate system are equal to zero.
The angular velocity of the satellite is
Thus,
Since , the kinetic energy of the
satellite can be determined from
Ans.=37.0025
A
106
B
J=37.0 MJ
=1
2(200)(116 900) +1
2(50)
A
6002
B
+1
2(50)(–300)2+1
2(18)
A
12502
B
T=1
2mvG2+1
2Ix¿vx¿2+1
2Iy¿vy¿2+1
2Iz¿vz¿2
vG2=(–250)2+2002+1202=116 900 m2>s2
vx¿=600 rad>svy¿=-300 rad>svz¿=1250 rad>s
v=[600i–300j+1250k] rad>s
Ix¿y¿=Iy¿z¿=Ix¿z¿=0
z¿
y¿x¿
Iz¿=200
A
0.32
B
=18 kg #m2
T
h
e 200-
k
g sate
lli
te
h
as
i
ts center of mass at po
i
nt G.Its ra
dii
of gyration about the ,, axes are
,respectively.At the instant shown, the
satellite rotates about the ,,and axes with the angular
velocity shown, and its center of mass Ghas a velocity of
.Determine the kinetic
energy of the satellite at this instant.
vG=5—250i+200j+120k6m>s
z¿y¿x¿
kx¿=ky¿=500 mm
kz¿=300 mm,y¿x¿z¿
x
G
800 mm
Vz¿1250 rad/s
z
,
z
¿
vG
Ans:
T=37.0 MJ
1145
*21–36.
SOLUTION
Angular momentum is conserved about the AB axis.
Equating components,
Ans.
If the projectile strikes the plate at D, the angular velocity is the same, only the
im
p
ulsive reactions at the bearin
g
supports Aand Bwill be different.
vAB =21.4 rad/s
=1
2c1
12(15)(0.15)2+15(0.075)2dv2
AB
1
2c1
12(15)(0.15)2+15(0.075)2d(8)2+15(9.81)(0.15)
T1+V1=T2+V2
vy=–0.9
c1
12(15)(0.15)2+15(0.075)2d=-8 rad/s
vz=0
vx=0
–0.9j=Ixvxi+Iyvyj+Izvzk
(HAB)1=(HAB)2
(HAB)1=-(0.003)(2000)(0.15)j={–0.9j}
D
A
z
150 mm
150 mm
150 mm
v
C
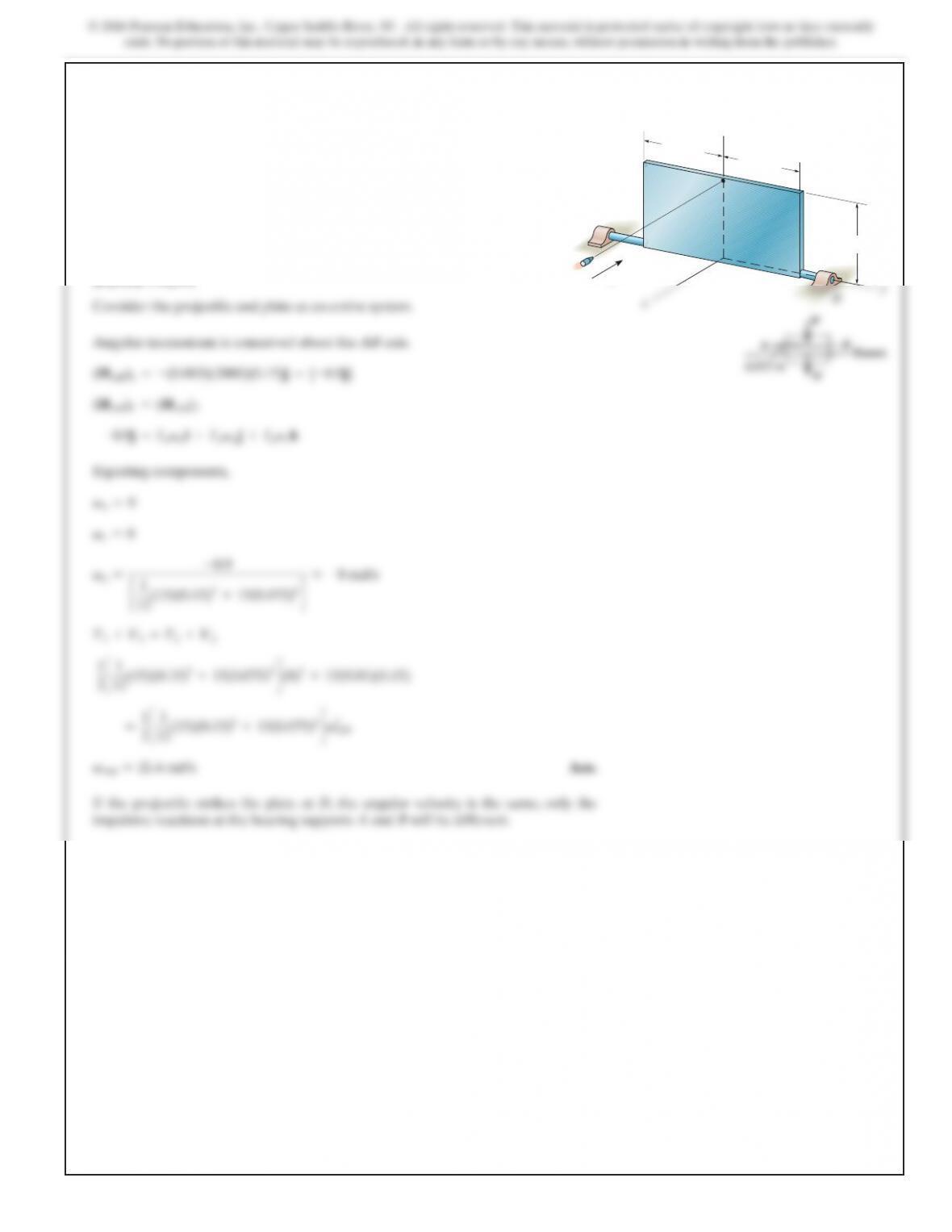
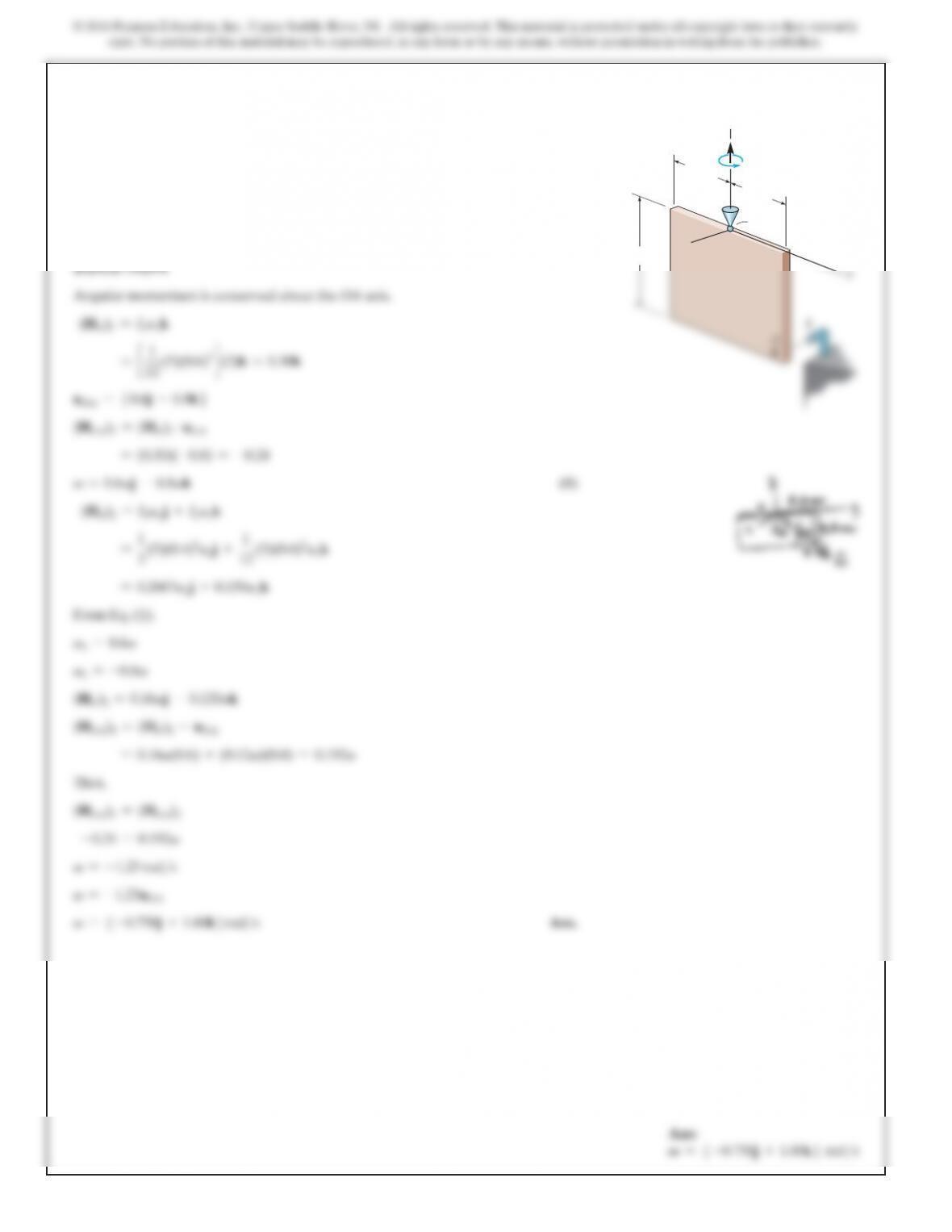
The 15-kg rectangular plate is free to rotate about the y axis
because of the bearing supports at A and B.When the plate is
balanced in the vertical plane, a 3-g bullet is fired into it,
perpendicular to its surface, with a velocity v = 5–2000i6 m>s.
Compute the angular velocity of the plate at the instant it has
rotated 180°. If the bullet strikes corner D with the same
velocity v, instead of at C, does the angular velocity remain the
same? Why or why not?
Ans:
v
AB =21.4 rad>s
21–37.
The 5-kg thin plate is suspended at O using a ball-and-
socket joint. It is rotating with a constant angular velocity
V
=52k6 rad>s
when the corner A strikes the hook at S,
which provides a permanent connection. Determine the
angular velocity of the plate immediately after impact.
=
c1
12
(5)(0.6)2
d
(2)k=0.30k
u
OA
=50.6j–0.8k6
(HOA)1=(HO)1#uOA
=(0.30)(–0.8) =–0.24
v
=0.6
v
j–0.8
v
k
(1)
(H
O
)2=I
yvy
j+I
zvz
k
=
1
3
(5)(0.4)2vyj+
1
12
(5)(0.6)2vzk
=0.2667
vy
j+0.150
vz
k
From Eq. (1),
vy
=0.6
v
v
z=–0.8
v
(HO)2=0.16
v
j–0.120
v
k
(HOA)2=(HO)2–uOA
=0.16
v
(0.6) +(0.12
v
)(0.8) =0.192
v
Thus,
(HOA)1=(HOA)2
–0.24 =0.192v
v
=–1.25 rad>s
v
=–1.25uOA
v
=5–0.750j+1.00k6rad>s
Ans.
O
400 mm
300 mm
300 mm
z
x
V {2k} rad/s

1147
21–38.
Determine the kinetic energy of the 7-kg disk and 1.5-kg rod
when the assembly is rotating about the z axis at
v
=5 rad>s.
SOLUTION
B
C
200 mm
v 5 rad/s
z
Ans:
T=1.14 J

1148
21–39.
Determine the angular momentum
H
z of the 7-kg disk and
1.5-kg rod when the assembly is rotating about the z axis at
v
=5 rad>s.
SOLUTION
B
C
200 mm
v 5 rad/s
z