
1085
20–35.
Solve Prob. 20–28 if the connection at B consists of a
pin as shown in the figure below, rather than a ball-and-
socket joint. Hint: The constraint allows rotation of the
rod both along the bar (j direction) and along the axis
of the pin (n direction). Since there is no rotational
component in the udirection, i.e., perpendicular to n
and j where
u=j
:
n
, an additional equation for
solution can be obtained from
V#u=0
. The vector n
is in the same direction as
r
D
>
B
:
r
C
>
B.
SOLUTION
r
r
B
D
C
u
j
n


*20–36.
Member ABC is pin connected at A and has a ball-and-
socket joint at B. If the collar at B is moving along the
inclined rod at vB = 8 m
>
s, determine the velocity of
point C at the instant shown. Hint: See Prob. 20–35.
SOLUTION
z
x
y
vB 8 m/s
30
C
A
B
1 m
2 m
1.5 m

20–37.
SOLUTION
Ans.
Ans.={–28.8i–5.45j+32.3k}m>s2
=(0.75j+8k)+0+0+0+(–28.8i–6.2j+24.3k)
aC=aB+Æ*rC>B+Æ*(Æ*rC>B)+2Æ*(vC>B)xyz +(aC>B)xyz
={–1.00i+5.00j+0.800k}m>s
=2j+0+(–1i+3j+0.8k)
vC=vB+Æ*rC>B+(vC>B)xyz
={–28.8i–6.2j+24.3k}m>s2
curvilinear translation, Æ=0 in which case the collar
appears to have both an angular velocity xyz = 1 + 2 and
radial motion.
æVV
Solve Example 20.5 such that the x, y, z axes move with

20–38.
Ans.aC={–28.2i–5.45j+32.3k}m>s2
=(0.75j+8k)+
C
(1.5i–20j–6k)*(0.2j)
D
+(4i+5k)*
C
(4i+5k)*(0.2j)
D
+2
C
(4i+5k)*(3j)
D
+2j
SOLUTION
Relative to XYZ,let be concident with XYZ and have and
Relative to , let xyz have
Ans.
aC=aB+Æ*rC>B+Æ*(Æ*rC>B)+2Æ*(vC>B)xyz +(aC>B)xyz
={–1i+5j+0.8k}m>s
=2j+
C
(4i+5k)*(0.2j)
D
+3j
vC=vB+Æ*rC>B+(vC>B)xyz
(aC>B)xyz ={2j}m>s2
(vC>B)xyz ={3j}m>s
arC>Bbxyz
={0.2j}m
Æx¿y¿z¿=0;Æ
#
x¿y¿z¿=0;
x¿y¿z¿
=0+0+
C
(1.5i)*(–0.5k)
D
+(4i*2j)={0.75j+8k}m>s2
aB=r
#
B=car
$
Bbx¿y¿z¿
+v1*ar
#
Bbx¿y¿z¿d+v
#
1*rB+v1*r
#
B
vB=r
#
B=ar
#
Bbx¿y¿z¿
+v1*rB=0+(4i)*(–0.5k)={2j}m>s
rB={–0.5k}m
=(1.5i+0)+
C
–6k+(4i)*(5k)
D
={1.5i–20j–6k} rad>s2
v
#=v
#
1+v
#
2=cav
#
1bx¿y¿z¿
+v1*v1d+cav2bx¿y¿z¿
+v1*v2d
v
#=v
#
1+v
#
2={4i+5k} rad>s
Æ
#
¿=v
#
1
Æ¿ =v1
x¿y¿z¿
æ=V1 + V2. In this case the collar appears only to move
radially outward along BD; hence æxyz = 0.
Solve Example 20.5 by fixing x, y, z axes to rod BD so that

1090
20–39.
z
y
15 ft
2 ft
O
A
B
u
v1, v1
v2, v2
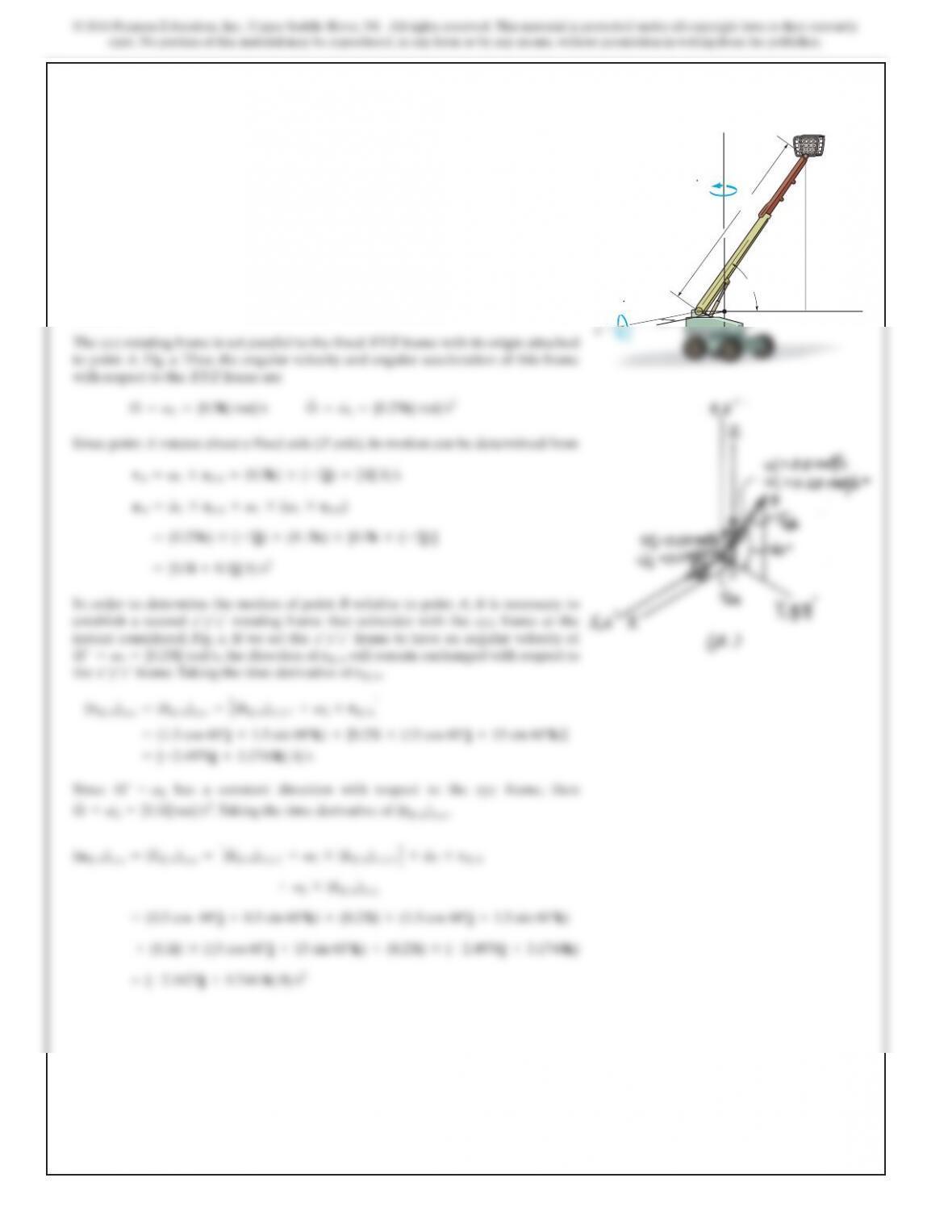
At the instant the telescopic boom AB of the
construction lift is rotating with a constant angular velocity
about the zaxis of and about the pin at A
with a constant angular speed of .
Simultaneously, the boom is extending with a velocity of
, and it has an acceleration of , both
measured relative to the construction lift. Determine the
velocity and acceleration of point Blocated at the end of
the boom at this instant.
0.5 ft>s2
1.5 ft>s
v2=0.25 rad>s
v1=0.5 rad>s
u
=60°,
SOLUTION
=
{
–
0.8683j
–
0.003886k} ft
>
s2
+0.25i*(–2.4976j+3.1740k) =
C
(0.5 cos 60°j+0.5 sin 60°k)+0.25i*(1.5 cos 60°j+1.5 sin 60°k)
D
Ans.
and
Ans.
=
{2.50i
–
2.24j
–
0.00389k} ft
>
s2
+2(0.5k)*(–2.4976j+3.1740k)+(–0.8683j–0.003886k)
=0.5j+0+0.5k*
C
(0.5k)*(15 cos 60°j+15 sin 60°k)
D
aB=aA+Æ
#
*rB>A+Æ*(Æ*rB>A)+2Æ*(vB>A)xyz +(aB>A)xyz
={–2.75i–2.50j+3.17k} m>s
=(1i)+(0.5k)*(15 cos 60°j+15 sin 60°k)+(–2.4976j+3.1740k
)
1092
*20–40.
At the instant , the construction lift is rotating about
the zaxis with an angular velocity of and an
angular acceleration of while the
telescopic boom AB rotates about the pin at Awith an
angular velocity of and angular
acceleration of . Simultaneously, the boom
is extending with a velocity of 1.5 ft s, and it has an
acceleration of 0.5 ft s2, both measured relative to the
frame. Determine the velocity and acceleration of point B
located at the end of the boom at this instant.
>>
v
#
2=0.1 rad>s2
v2=0.25 rad>s
v1
#=0.25 rad>s2
v1=0.5 rad>s
u
=60°
SOLUTION
Since point Arotates about a fixed axis (Zaxis), its motion can be determined from
In order to determine the motion of point Brelative to point A, it is necessary to
establish a second rotating frame that coincides with the xyz frame at the
instant considered, Fig.a. If we set the frame to have an angular velocity of
, the direction of will remain unchanged with respect to
the frame.Taking the time derivative of ,
Since has a constant direction with respect to the xyz frame, then
.Taking the time derivative of ,
=
{
–
2.1673j
+
0.7461k} ft
>
s2
+(0.1i)*(15 cos 60°j+15 sin 60°k)+(0.25i)*(–2.4976j+3.1740k)
=(0.5 cos 60°j+0.5 sin 60°k)+(0.25i)*(1.5 cos 60°j+1.5 sin 60°k)
+v2*(r
#
B>A)xyz
(aB>A)xyz =(r
$
B>A)xyz =
C
(r
$
B>A)x¿y¿z¿+v2*(r
#
B>A)x¿y¿z¿
D
+v
#
2*rB>A
(r
#
B>A)xyz
Æ
#
=v2
#=[0.1i] rad>s2
Æ¿ =v2
={–2.4976j+3.1740k} ft>s
=(1.5 cos 60°j+1.5 sin 60°k)+[0.25i*(15 cos 60°j+15 sin 60°k)]
(vB>A)xyz =(r
#
B>A)xyz =
C
(r
#
B>A)x¿y¿z¿+v2*rB>A
D
rB>A
x¿y¿z¿
rB>A
Æ¿ =v2=[0.25i] rad>s
x¿y¿z¿
x¿y¿z¿
={0.5i+0.5j} ft>s2
=(0.25k)*(–2j)+(0 .5k)*[0.5k*(–2j)]
aA=v
#
1*rOA +v1*(v1*rOA)
vA=v1*rOA =(0.5k)*(–2j)={1i} ft>s
z
y
15 ft
2 ft
C
O
A
B
u
v1, v1
v2, v2
Ans.
and
Ans.={1.12i–3.54j+0.746k} ft>s2
*(–2.4976j+3.1740k)+(–2.1673j+0.7461k)
*[(0.5k)*(15 cos 60°j+15 sin 60°k)] +2(0.5k)
=(0.5i+0.5j)+(0.25k)*(15 cos 60°j+15 sin 60°k)+(0.5k)
+2Æ*(vB>A)xyz +(aB>A)xyz
aB=aA+Æ
#
*rB>A+Æ*(Æ*rB>A)
={–2.75i–2.50j+3.17k} ft>s
=[1i]+(0.5k)*(15 cos 60°j+15 sin 60°k)+(–2.4976j+3.1740k)
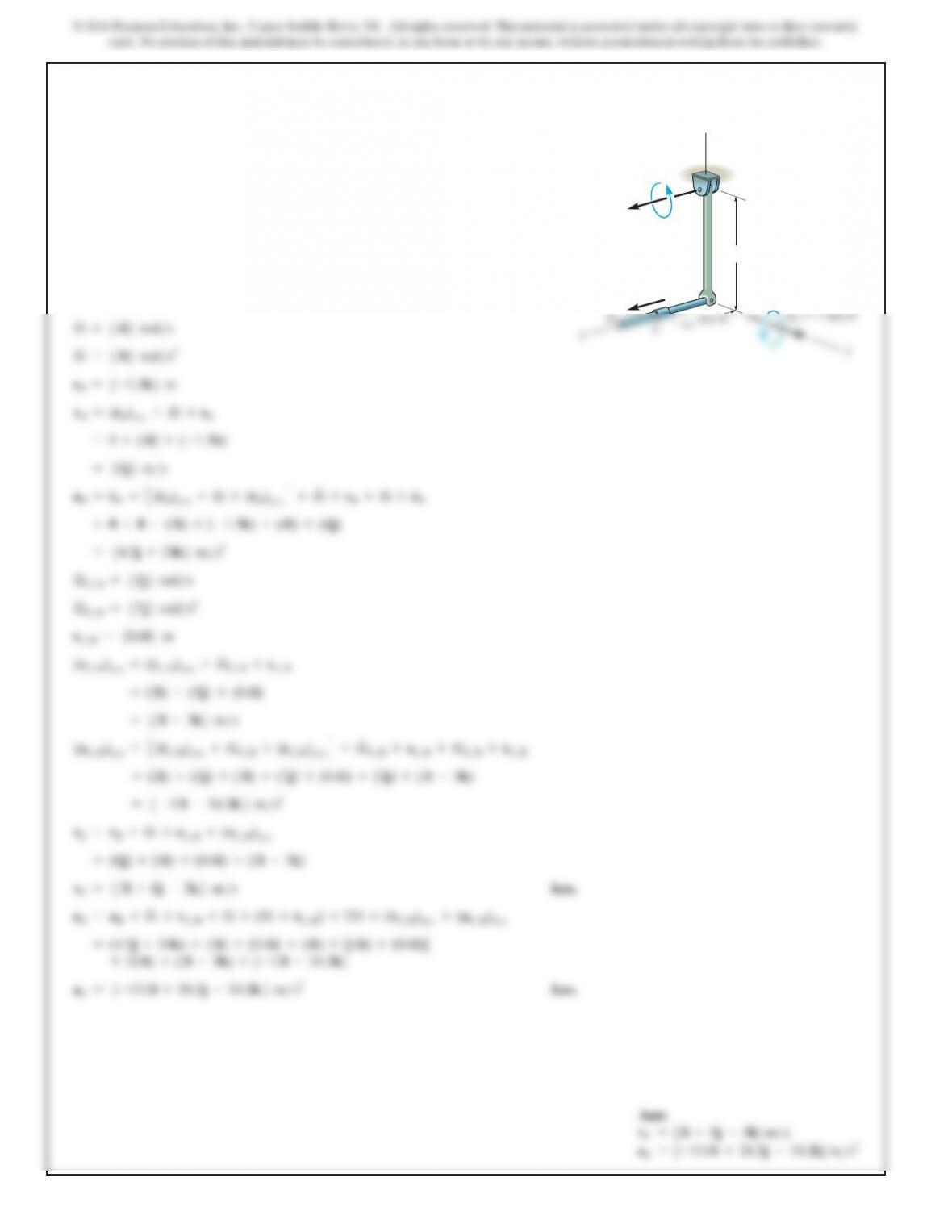
20–41.
At the instant shown, the arm AB is rotating about the fixed pin
A with an angular velocity
v
1 = 4 rad
>
s and angular acceleration
v
#
1 = 3 rad
>
s2. At this same instant, rod BD is rotating relative to
rod AB with an angular velocity
v
2 = 5 rad
>
s, which is increasing
at
v
#
2 = 7 rad
>
s2. Also, the collar C is moving along rod BD with
a velocity of 3 m
>
s and an acceleration of 2 m
>
s2, both measured
relative to the rod. Determine the velocity and acceleration of
the collar at this instant.
z
1.5 m
A
B
v1 4 rad/s
v1 3 rad/s2
v2 5 rad/s
3 m/s
2 m/s2
A
A
A
A
A
A
A
A
A
A
SOLUTION
Ω
=5
3i
6
rad
>
s
rB=5–1.5k6 m
v
B
=(r
#
B
)
xyz
+Ω*r
B
=0+(4i)*(–1.5k)
=56j6 m>s
aB=r
$
B=
3
(r
$
B)xyz +Ω*(r
#
B)xyz
4
+Ω
#
*rB+Ω*r
#
B
=0+0+(3i)*(–1.5k)+(4i)*(6j)
=54.5j+24k6 m>s2
Ω
C
>
B
=55j6 rad>s
Ω
#
C
>
B=
5
7 j
6
rad
>
s
2
r
C
>
B
=50.6i6 m
(v
C
>
B
)
xyz
=(r
#
C
>
B
)
xyz
+Ω
C
>
B
*r
C
>
B
=(3i)+(5j)*(0.6i)
=53i–3k6 m>s
(aC
>
B)xyz =
3
(r
$
C
>
B)xyz +ΩC
>
B*(r
#
C
>
B)xyz
4
+Ω
#
C
>
B*rC
>
B+ΩC
>
B*r
#
C
>
B
=(2i)+(5j)*(3i)+(7j)*(0.6i)+(5j)*(3i–3k)
=5–13i–34.2k6 m>s2
v
C
=v
B
+Ω*r
C
>
B
+(v
C
>
B
)
xyz
=(6j)+(4i)*(0.6i)+(3i–3k)
vC=53i+6j–3k6 m>s
Ans.
aC=aB+Ω
#
*rC
>
B+Ω*(Ω*rC
>
B)+2Ω*(vC
>
B)xyz +(aC
>
B)xyz
=(4.5j+24k)+(3i)*(0.6i)+(4i)*[(4i)*(0.6i)]
+2(4i)*(3i–3k)+(–13i–34.2k)
aC=5–13.0i+28.5j–10.2k6 m>s2
Ans.
20–42.
SOLUTION
Since point Arotates about a fixed axis (Zaxis), its motion can be determined from
In order to determine the motion of point Brelative to point A, it is necessary to
establish a second rotating frame that coincides with the xyz frame at the
instant considered, Fig. a. If we set the frame to have an angular velocity
relative to the xyz frame of , the direction of will
remain unchanged with respect to the frame.Taking the time derivative of
,
Since has a constant direction with respect to the xyz frame, then
.Taking the time derivative of ,(r
#
A>B)xyz
Æ
#
¿=v
#
2=0
Æ¿ =v2
=[–3j+5.196k]m>s
=0+(0.5i)*(12 cos 30° j+12 sin 30°k)
(vB>A)xyz =(r
#
B>A)xyz =
C
(r
#
B>A)x¿y¿z¿+v2*(rB>A)xyz
D
(rB>A)xyz
x¿y¿z¿
(rB>A)xyz
Æ¿ =v2=[0.5i] rad>s
x¿y¿z¿
x¿y¿z¿
=[–3.375j]m>s2
=0+(1.5k)*[(1.5k)*(1.5j)]
aA=v
#
1*rOA +v1*(v1*rOA)
vA=v1*rOA =(1.5k)*(1.5j)=[–2.25i]m>s
12 m
1.5 m
z
y
A
B
O
u
V2,V2
V1,V1
Thus,
Ans.
and
=(–3.375j)+0+1.5k*
C
(1.5k)*(12 cos 30° j+12 sin 30° k)
D
+2(1.5k)*(–3j+5.196k)+(–2.598j–1.5k)
aB=aA+Æ
#
*rB>A+Æ*(Æ*rB>A)+2Æ*(vAB)xyz +(aAB)xyz
=[–17.8i–3j+5.20k]m>s
=(–2.25i)+1.5k*(12 cos 30° j+12 sin 30° k)+(–3j+5.196k)
vB=vA+Æ*rB>A+(vB>A)xyz
=[–2.598j–1.5k]m>s2
=[0 +0] +0+(0.5i)*(–3j+5.196k)
(aA>B)xyz =(r
$
A>B)xyz =
C
(r
$
A>B)x¿y¿z¿+v2*(r
#
A>B)x¿y¿z¿
D
+v
#
2*(rA>B)xyz +v2*(r
#
A>B)xyz
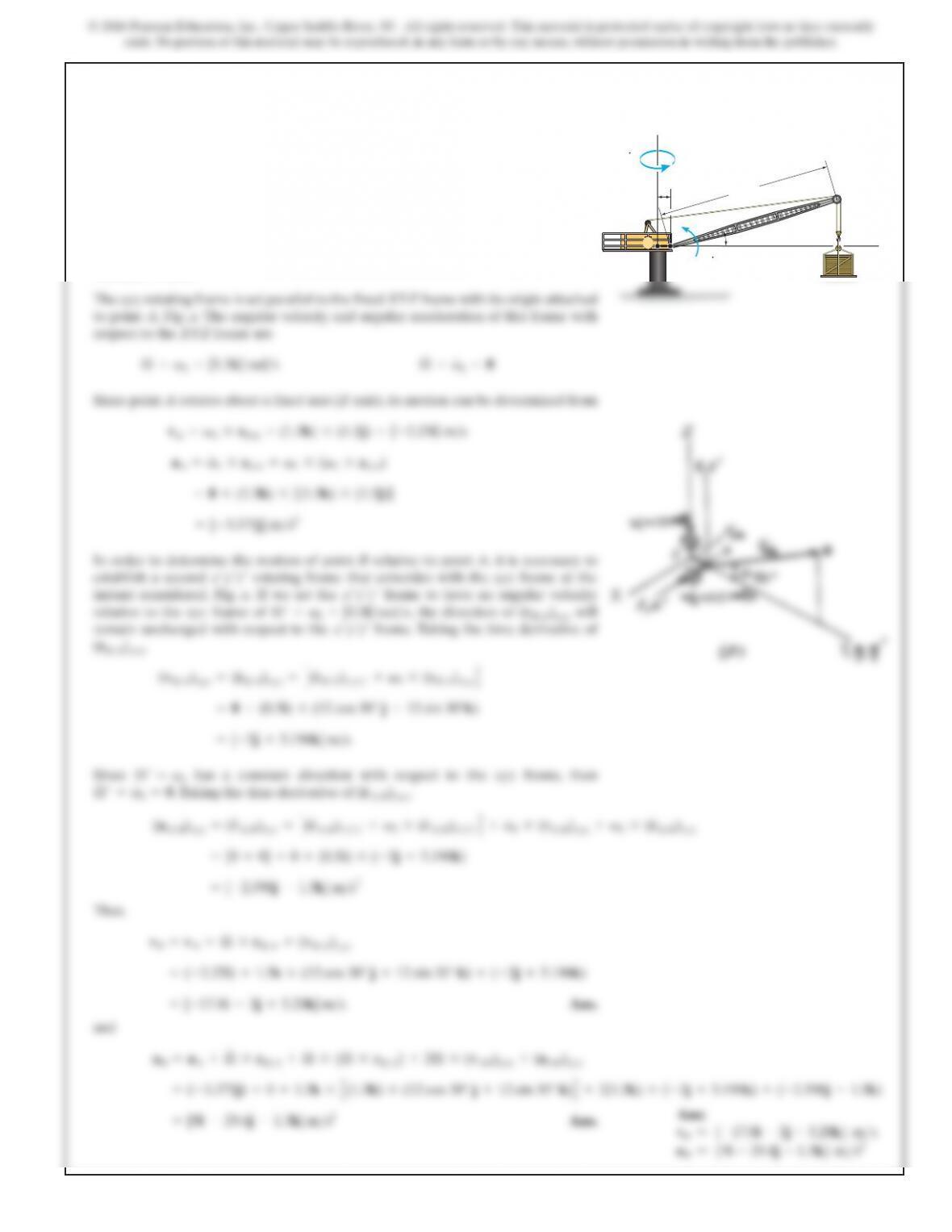
At the instant
u
=30°, the frame of the crane and the
boom
AB rotate with a constant angular velocity of
v
1
= 1.5 rad>s and v
2
= 0.5 rad>s, respectively. Determine
the velocity and acceleration of point
B at this instant.
1096
20–43.
At the instant ,the frame of the crane is rotating with
an angular velocity of and angular
acceleration of ,while the boom AB rotates
with an angular velocity of and angular
acceleration of .Determine the velocity and
acceleration of point Bat this instant.
v
#
2=0.25 rad>s2
v2=0.5 rad>s
v
#
1=0.5 rad>s2
v1=1.5 rad>s
u
=30°
SOLUTION
Since point Arotates about a fixed axis (Zaxis), its motion can be determined from
In order to determine the motion of point Brelative to point A, it is necessary to
establish a second rotating frame that coincides with the xyz frame at the
instant considered, Fig. a. If we set the frame to have an angular velocity
relative to the xyz frame of , the direction of will
remain unchanged with respect to the frame.Taking the time derivative of
,
Since has a constant direction with respect to the xyz frame, then
.Taking the time derivative of ,(r
#
B>A)xyz
Æ
#
¿=v
#
2=[0.25i]m>s2
Æ¿ =v2
=[–3j+5.196k]m>s
=0+(0.5i)*(12 cos 30° j+12 sin 30° k)
(vB>A)xyz =(r
#
B>A)xyz =
C
(r
#
B>A)x¿y¿z¿+v2*(rB>A)xyz
D
(rB>A)xyz
x¿y¿z¿
(rB>A)xyz
Æ¿ =v2=[0.5i] rad>s
x¿y¿z¿
x¿y¿z¿
=[–0.75i–3.375j]m>s2
=(0.5k)*(1.5j)+(1.5k)*
C
(1.5k)*(1.5j)
D
aA=v
#
1*rOA +v1*(v1*rOA)
vA=v1*rOA =(1.5k)*(1.5j)=[–2.25i]m>s
12 m
1.5 m
z
y
A
B
O
u
V2,V2
V1,V1
=[–4.098j+1.098k]m>s2
=[0 +0] +(0.25i)*(12 cos 30° j+12 sin 30°k)+0.5i*(–3j+5.196k)
(aB>A)=(r
$
B>A)xyz =
C
(r
$
B>A)x¿y¿z¿+v2*(r
#
B>A)x¿y¿z¿
D
+Æ
#
2*(rB>A)xyz +v2*(r
#
B>A)xyz