20–19.
SOLUTION
The resultant angular velocity is always directed along the
instantaneous axis of zero velocity IA.
Ans.
, roF
For ,.
Ans.a=0+(–26.08k)={–26.1k} rad>s2
a=v
#=(v
#
1)XYZ +(v
#
2)XYZ
(v
#
2)XYZ =(v
#
2)xyz +Æ*v2=0+0=0
Æ=0v2
={–26.08k} rad>s2
=0+(6j)*(4.3466i+6.7162j)
(v1)xyz =(v1)xyz +Æ*v1
Æ=v2={6j} rad>sv1
v1=8 sin 32.91° i+8 cos 32.91° j={4.3466i+6.7162j} rad>s
v2={6 j} rad>s
v2
sin 14.04° =8
sin 18.87°
v2=6.00 rad>s
={4.35i+12.7j} rad>s
v=13.44 sin 18.87° i+13.44 cos 18.87° j
v
sin 147.09° =8
sin 18.87°
v=13.44 rad>s
v=v1+v2
300 =14.04°
23002+752
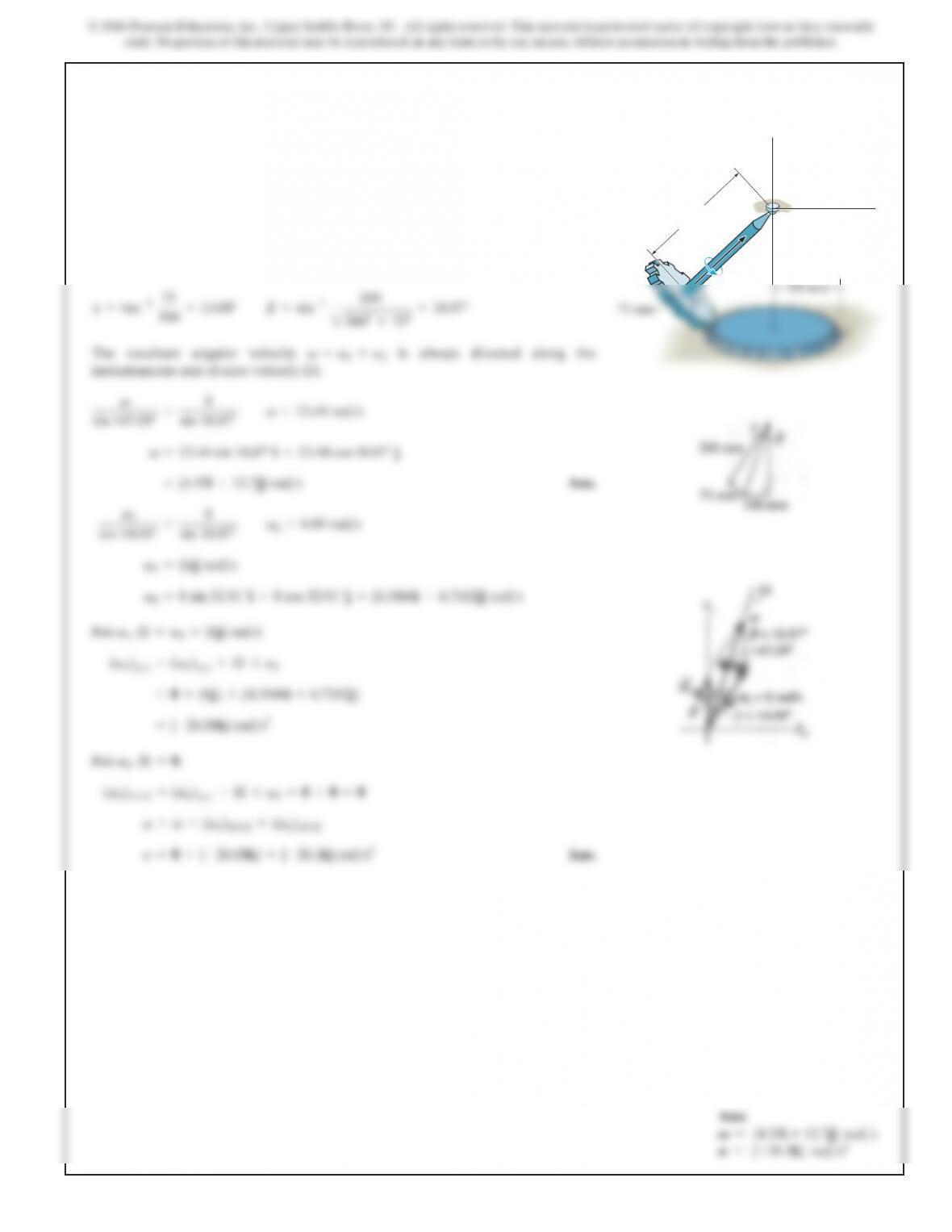
Shaft BD is connected to a ball-and-socket joint at B, and a
beveled gear Ais attached to its other end. The gear is in
mesh with a fixed gear C. If the shaft and gear Aare
spinning with a constant angular velocity
determine the angular velocity and angular acceleration of
gear A.
v1=8 rad>s,
300mm
A
B
C
D
1
y
x
v
*20–20.
vy 30 rad/s
z
y
0.15 m
A
C
B
vy=30 rad>s
SOLUTION
velocity,which is along the line where gears Aand Bmesh since gear Ais held fixed.
From Fig. a,the vector addition gives
Equating the jand kcomponents gives
Thus,
Ans.
Here, we will set the XYZ fixed reference frame to coincide with the xyz rotating
frame at the instant considered. If the xyz frame rotates with an angular velocity of
, then will always be directed along the yaxis with
respect to the xyz frame.Thus,
When ,is always directed along the zaxis.Therefore,
Thus,
Ans.a=v
#
y+v
#
z=(450i)+0=[450i] rad>s2
v
#
z=
A
v
#
z
B
xyz +vz*vz=0+0=0
vz
Æ=vz
v
#
y=
A
v
#
y
B
xyz +vz*vy=0+(–15k)*(30j)=[450i] rad>s2
vy
Æ=vz=[–15k] rad>s
v=[30j–15k] rad>s
vz=15 rad>s–1
25
A
1525
B
=-vz
v=1525 rad>s
2
25
v=30
2
25
vj–1
25
vk=30j–vzk
v=vy+vz
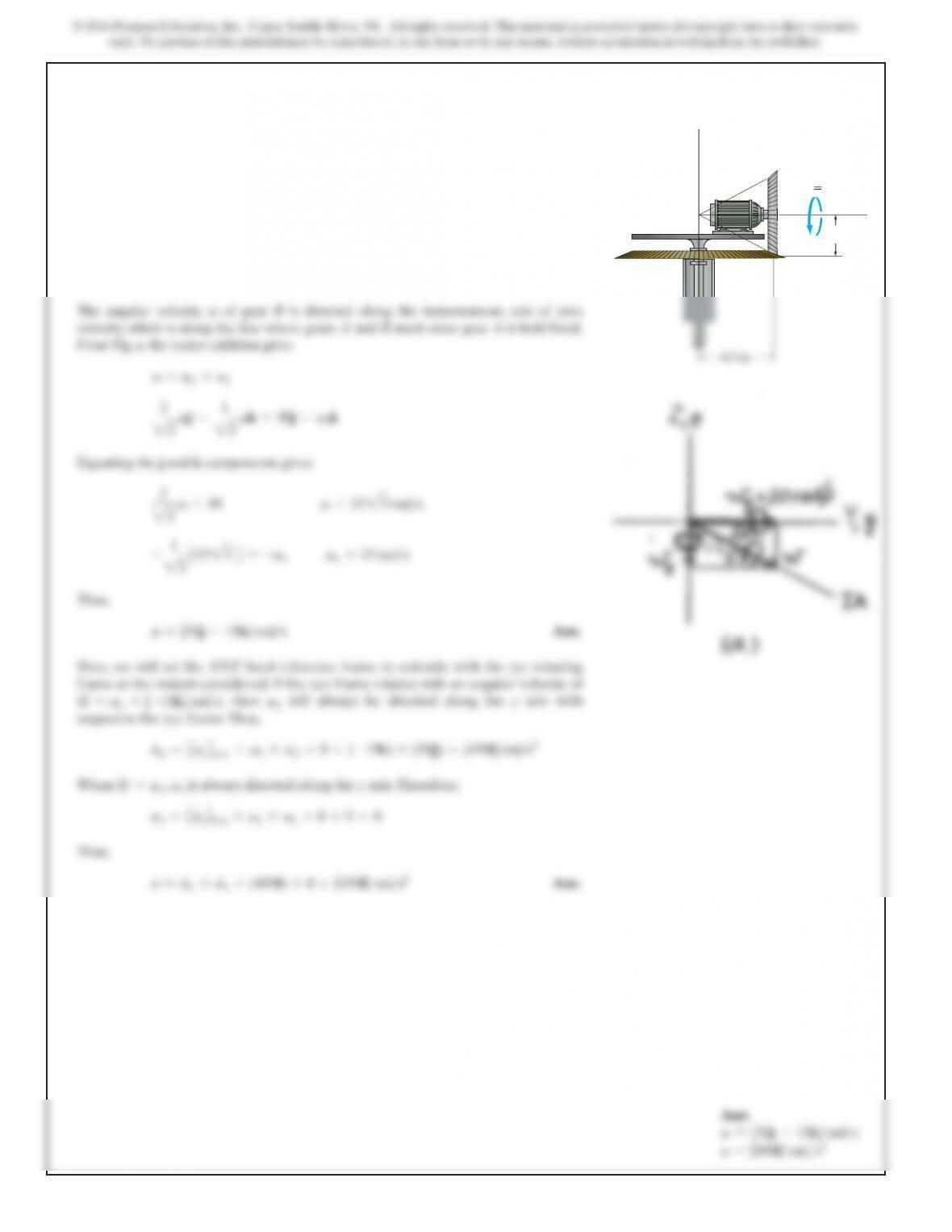
Gear B is driven by a motor mounted on turntable C. If gear
A is held fixed, and the motor shaft rotates with a constant
angular velocity of , determine the angular
velocity and angular acceleration of gear B.
20–21.
vy 30 rad/s
z
y
0.15 m
A
C
B
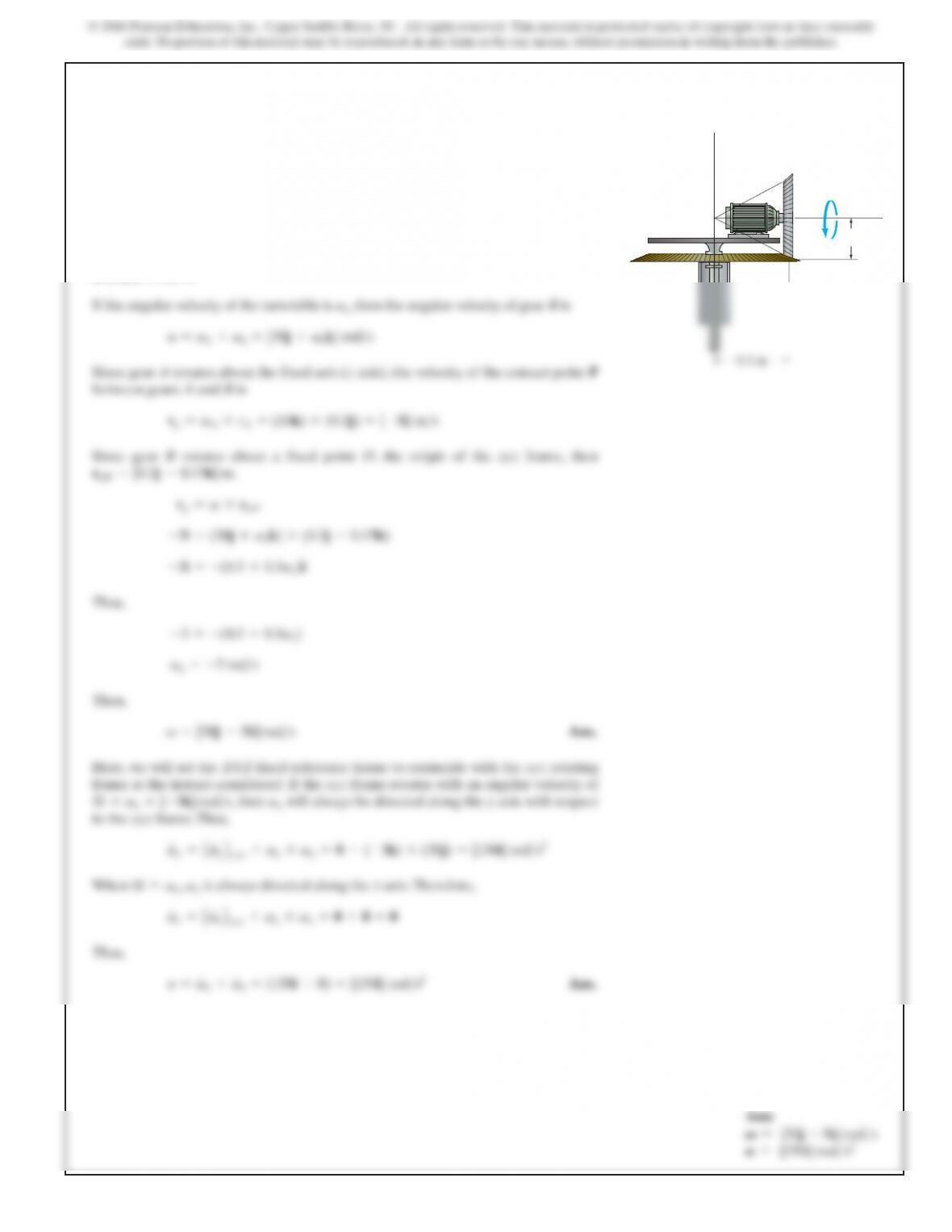
Gear Bis driven by a motor mounted on turntable C.If gear
Aand the motor shaft rotate with constant angular speeds of
and ,respectively,
determine the angular velocity and angular acceleration of
gear B.
vy={30j} rad>svA={10k} rad>s
SOLUTION

20–22.
The crane boom OA rotates about the zaxis with a constant
angular velocity of , while it is rotating
downward with a constant angular velocity of
. Determine the velocity and acceleration of
point Alocated at the end of the boom at the instant shown.
v2=0.2 rad>s
v1=0.15 rad>s
SOLUTION
110 ft
Az
V1
50 ft
20–23.
SOLUTION
Point Ois a fixed point of rotation for gears A, E, and B.
Ans.
Ans.vB=466.7
60 =7.78 rad>s
vP¿¿ =Æ*rP¿¿ =(27.78j+30k)*(40j+60k)={466.7i}mm>s
vA=2866.7
60 =47.8 rad>s
vP¿=Æ*rP¿=(27.78j+30k)*(–40j+60k)={2866.7i}mm>s
Æ=vG+vE={27.78j+30k} rad>s
vG=5000
180 =27.78 rad>s
v
P=vHrH=100(50) =5000 mm>s
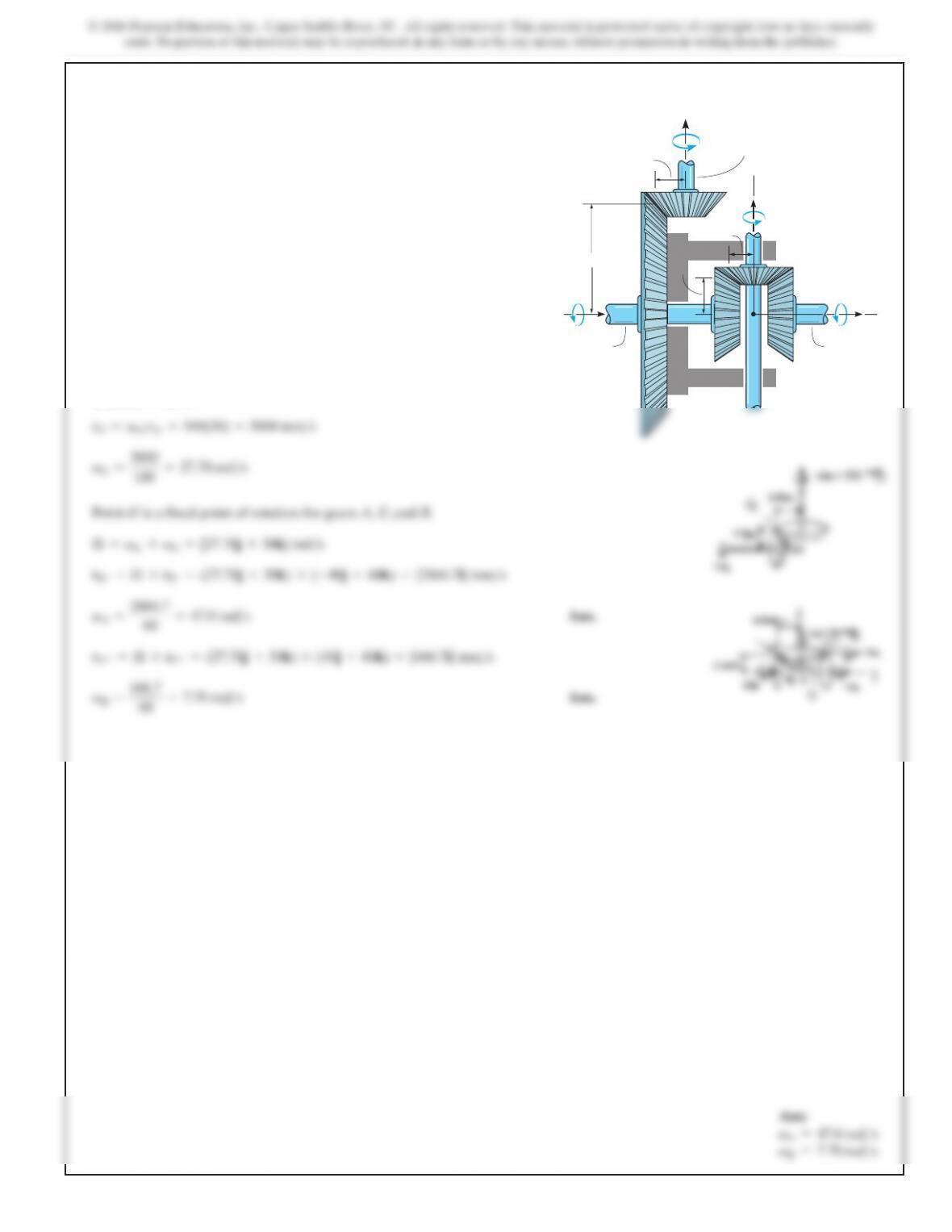
The differential of an automobile allows the two rear
wheels to rotate at different speeds when the automobile
travels along a curve.For operation, the rear axles are
attached to the wheels at one end and have beveled gears A
and Bon their other ends.The differential case Dis placed
over the left axle but can rotate about Cindependent of the
axle.The case supports a pinion gear Eon a shaft, which
meshes with gears Aand B.Finally,a ring gear Gis fixed to
the differential case so that the case rotates with the ring
gear when the latter is driven by the drive pinion H.This
gear,like the differential case, is free to rotate about the left
wheel axle. If the drive pinion is turning at
and the pinion gear Eis spinning about its shaft at
determine the angular velocity, and
of each axle.
vB,vA
vE=30 rad>s,
vH=100 rad>s
50 mm
180 mm
To left
wheel
GE
z
H
AB
O
C
D
To right
wheel
From motor
40 mm
60 mm
v
E
v
B
y
V
H
V
A
1070
*20–24.
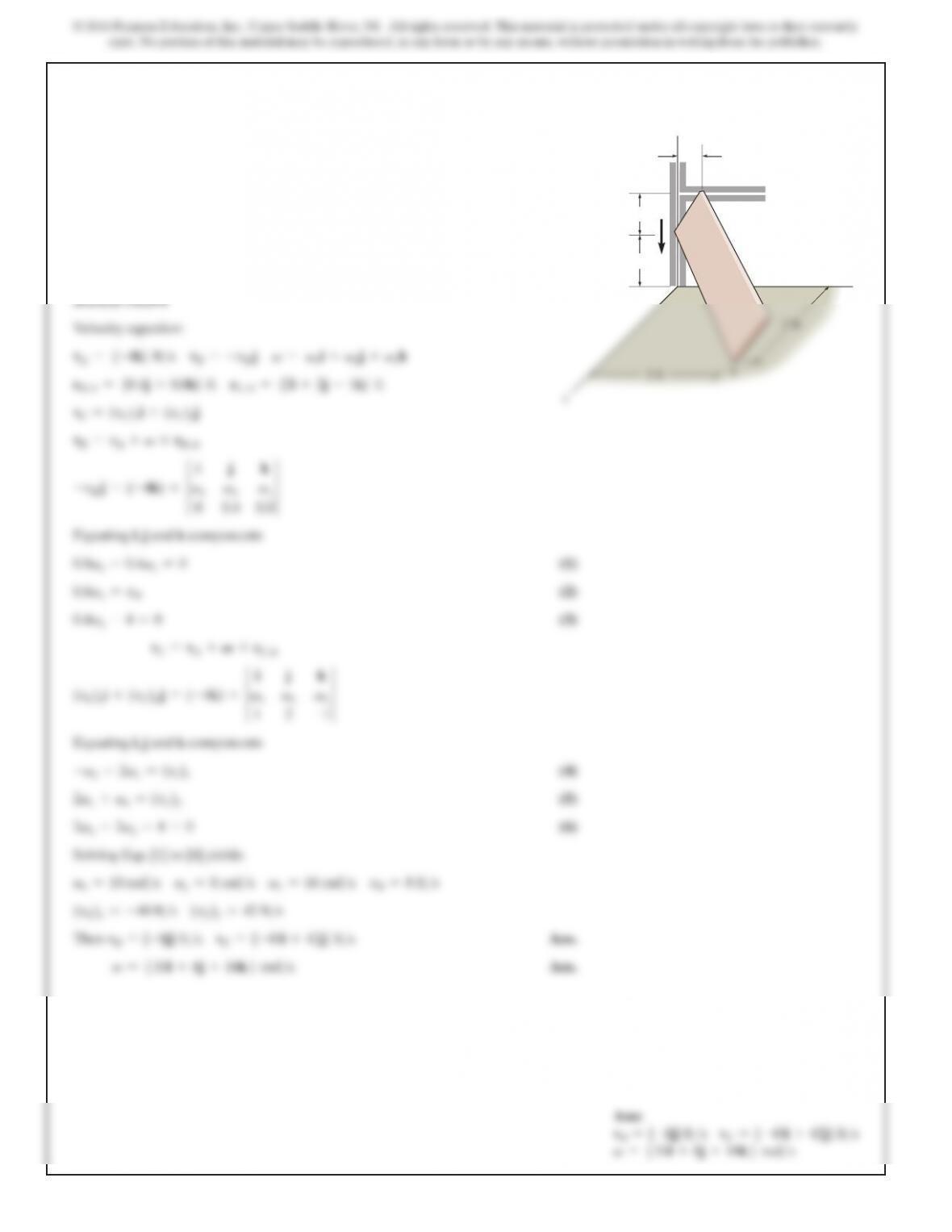
The end C of the plate rests on the horizontal plane,
while end points A and B are restricted to move along
the grooved slots. If at the instant shown A is moving
downward with a constant velocity of vA = 4 ft
>
s,
determine the angular velocity of the plate and the
velocities of points B and C.
B
vA
1 ft
0.8 ft
0.4 ft
z
y
A
20–25.
Disk Arotates at a constant angular velocity of If
rod BC is joined to the disk and a collar by ball-and-socket
joints, determine the velocity of collar Bat the instant
shown. Also, what is the rod’s angular velocity if it is
directed perpendicular to the axis of the rod?
VBC
10 rad
>
s.
z
y
300 mm
DB
E

20–26.
Rod AB is attached to collars at its ends by using
ball-and-socket joints. If collar A moves along the fixed
rod at vA = 5 m
>
s, determine the angular velocity of the
rod and the velocity of collar B at the instant shown.
Assume that the rod’s angular velocity is directed
perpendicular to the axis of the rod.
SOLUTION
x
vA 5 m/s
z
y
2 m
1 m
45
A
B

1073
20–27.
Rod AB is attached to collars at its ends by using ball-and-
socket joints. If collar A moves along the fixed rod with a
velocity of vA = 5 m
>
s and has an acceleration aA = 2 m
>
s2 at
the instant shown, determine the angular acceleration of the
rod and the acceleration of collar B at this instant. Assume
that the rod’s angular velocity and angular acceleration are
directed perpendicular to the axis of the rod.
x
vA 5 m/s
z
y
2 m
1 m
45
A
B
SOLUTION

1074
Ans:
A
AB =5–
7.9
i–
3.95
j+
4.75
k6
rad
>
s
2
aB=5–
19.75
j–
19.75
k6
m
>
s
2
22
22

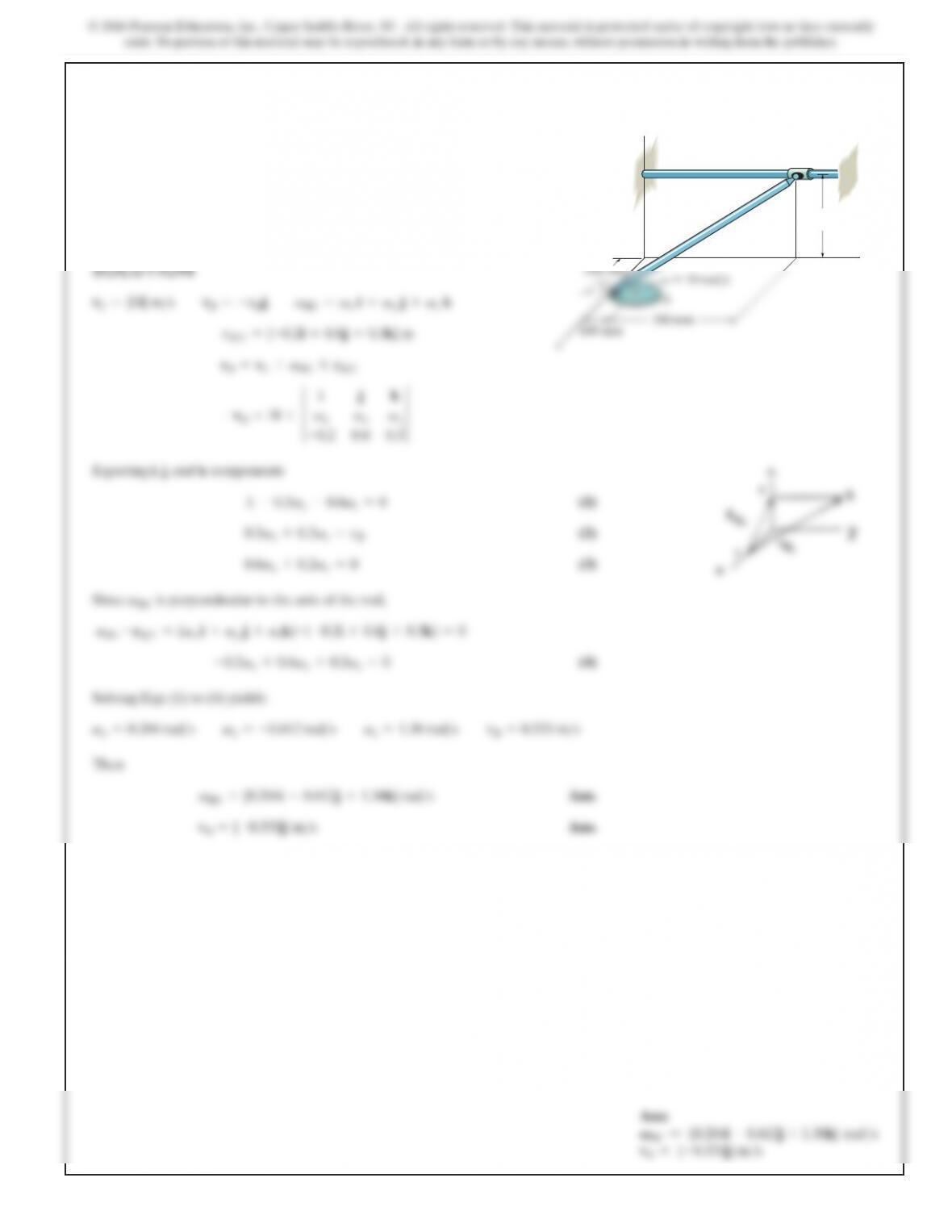
*20–28.
If the rod is attached with ball-and-socket joints to
smooth collars A and B at its end points, determine the
velocity of B at the instant shown if A is moving upward
at a constant speed of vA = 5 ft
>
s. Also, determine the
angular velocity of the rod if it is directed perpendicular
to the axis of the rod.
SOLUTION
vA=55k6 ft>s
Also,
r
B
>
A
=(6 –0)i+(2 –0)j+(0 –3)k=56i+2j–3k6ft
and
VAB
=
vx
i+
vy
j+
vz
k
. Applying the relative velocity equation,
v
B
=v
A
+V
AB
*r
B
>
A
–vB
j=5k+
(
vxi+vy
j+vzk
)
*(6i+2j–3k)
–vB
j=
(
–3vy–2vz
)
i+
(
3vx+6vz
)
j+
(
2vx–6vy+5
)
k
Equating i, j and k components,
0=–3
vy
–2
vz (1)
–vB=3
v
x+6
v
z
(2)
0=2
vx
–6
vy
+5
(3)
Assuming that
VAB
is directed perpendicular to the axis of rod AB, then,
VAB
#r
B
>
A
=0
(
vx
i+vy
j+vzk
)
#
(6i+2j–3k)=0
6
vx
+2
vy
–3
vz
=0
(4)
Solving Eqs. 1 to 4,
vx=–
65
98
rad
>
s=–0.6633 rad
>
s vy=
30
49
rad
>
s=0.6122 rad
>
s
vz=–
45
49
rad
>
s=–0.9183 rad
>
s
vB=7.50 ft>s
Thus,
V
AB =5–0.663i+0.612j–0.918k6 rad>s
Ans.
vB=5–7.50j6 ft>s
Ans.
z
x
vA 5 ft/s
3 ft
2 ft
B
A

1076
SOLUTION
20–29.
If the collar at A in Prob. 20–28 is moving upward with an
acceleration of aA = {–2k} ft
>
s2, at the instant its speed is
vA = 5 ft
>
s, determine the acceleration of the collar at B at
this instant.
z
x
vA 5 ft/s
3 ft
2 ft
B
A

1077
Ans:
a
B=5–
37.6j
6
ft
>
s
2

20–30.
Rod AB is attached to collars at its ends by ball-and-
socket joints. If collar A has a speed vA = 4 m
>
s, determine
the speed of collar B at the instant z = 2 m. Assume the
angular velocity of the rod is directed perpendicular to
the rod.
SOLUTION
The velocities of collars A and B are
vA=54k6 m>s
vB=–vB
a3
b
j+vB
a4
b
k=–
3
j+
4
vA 4 m/s
A
1.5 m
2 m
B
z
z
x
20–31.
The rod is attached to smooth collars A and B at its ends
using ball-and-socket joints. Determine the speed of B at
the instant shown if A is moving at vA = 8 m
>
s. Also,
determine the angular velocity of the rod if it is directed
perpendicular to the axis of the rod.
SOLUTION
y
vA 8 m/s
1 m
1.5 m
A
B
z
1080
SOLUTION
v
B
=v
A
+r
B
>
A
The velocities of collars A and B are
vA=58k6 m>s
vB=vB
a3
5b
i–vB
a4
5b
j=
3
5
vB
i–
4
5
vB j
Also,
r
B
>
A
=(0 –0)i+(2 –0)j+(0 –1)k=52j–1k6 m
and
VAB
+
vx
i+
vy
j+
vz
k
. Applying the relative velocity equation,
v
B
=v
A
+
VAB
*r
B
>
A
3
5
vB i–
4
5
vB j=8k+(vxi+vy
j+vzk)*(2j–1k)
3
5
vBi–
4
5
vB
j=(–vy–2vz)i+vx
j+(2vx+8)k
Equating i, j and k components,
3
5
vB=–vy–2vz (1)
–
4
5
vB=vx (2)
0=2
v
x+8
(3)
Assuming that
VAB
is perpendicular to the axis of rod AB, then
VAB
#r
B
>
A
=0
(
vx
i+
vy
j+
vz
k)#(2j–1k)=0
2
vy
–
vz
=0
(4)
Solving Eq (1) to (4)
v
x=–4.00 rad>s
vy
=–0.600 rad>s
v
z=–1.20 rad>s
v
B=
5.00
m>s
Ans.
Then,
v
AB =5–4.00i–0.600
j–1.20k6 rad>s
Ans.
Note.
vB
can be obtained by solving Eqs (2) and (3) without knowing the direction
of
VAB
.
*20–32.
If the collar A in Prob. 20–31 has a deceleration of
aA = {–5k} m
>
s2, at the instant shown, determine the
acceleration of collar B at this instant.
y
vA 8 m/s
1 m
1.5 m
A
B
z

*20–32. Continued
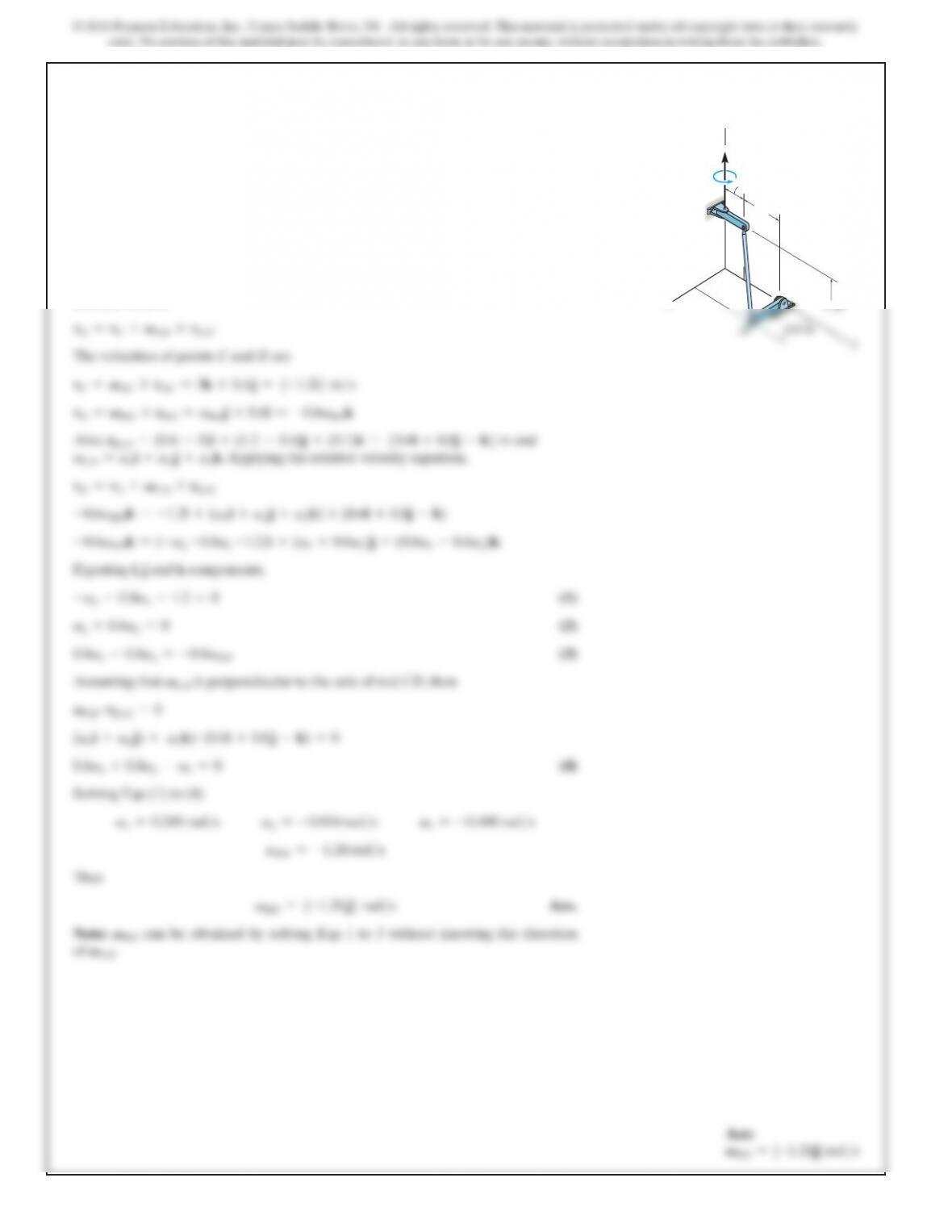
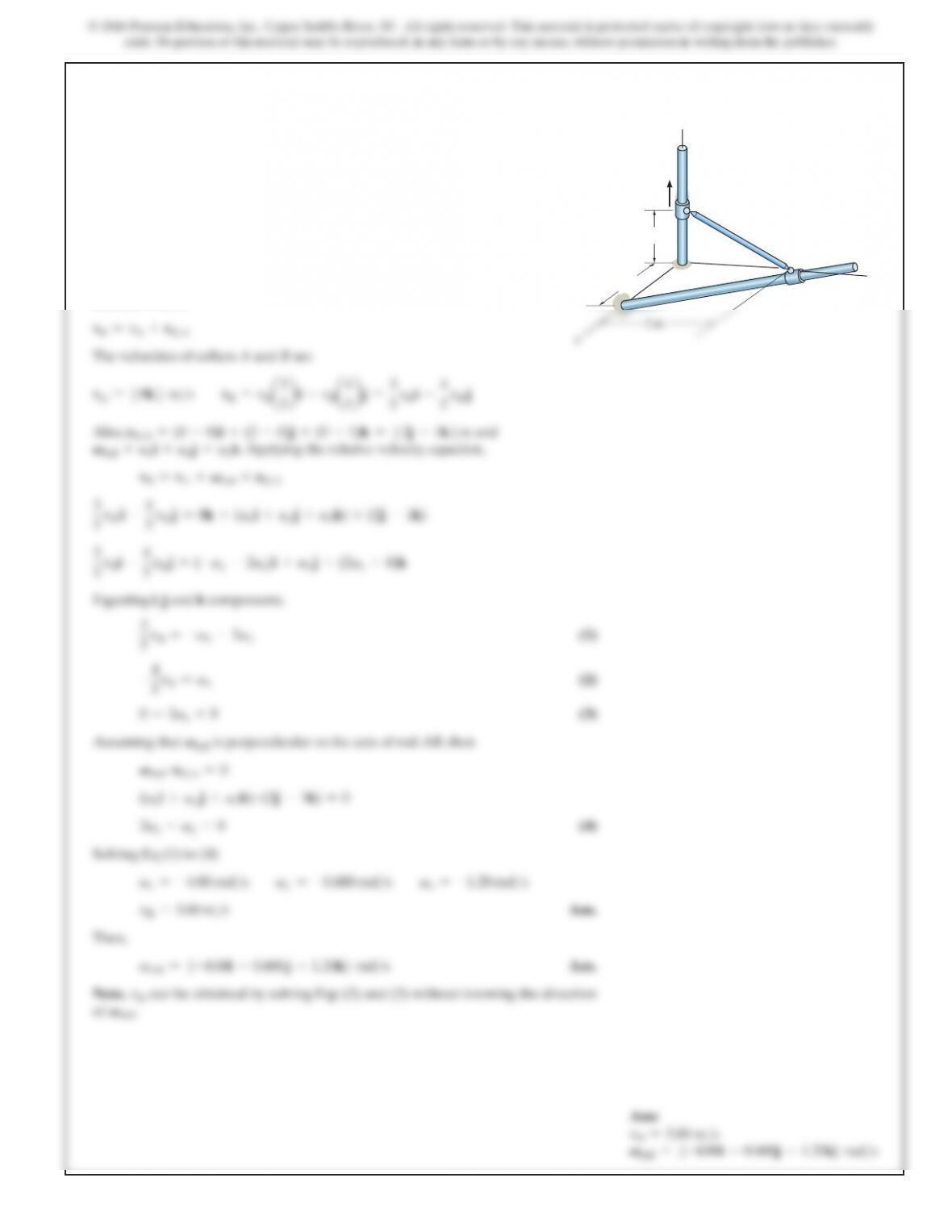
20–33.
Rod CD is attached to the rotating arms using ball-and-
socket joints. If AC has the motion shown, determine the
angular velocity of link BD at the instant shown.
z
x
y
0.4 m
0.8 m
1 m
v
=v
+V
*r
>
A
B
C
vAC 2 rad/s2
vAC 3 rad/s
SOLUTION
The velocities of points C and D are
vC=
V
AC *rAC =3k*0.4
j=5–1.2i6 m>s
vD=
V
BD *rBD =
v
BDj*0.6i=–0.6
v
BDk
Also,
r
D
>
C
=(0.6 –0)i+(1.2 –0.4)j+(0.1)k=50.6i+0.8j–k6 m
and
vCD
=
vx
i+
vy
j+
vz
k
. Applying the relative velocity equation,
v
D
=v
C
+V
CD
*r
D
>
C
–0.6
vBD
k=–1.2i+(
vx
i+
vy
j+
vz
k)*(0.6i+0.8j–k)
–0.6
vBD
k=(–
vy
–0.8
vz
–1.2)i+(
vx
+0.6
vz
)j+(0.8
vx
–0.6
vy
)k
.
Equating i, j and k components,
–
vy
–0.8
vz
–1.2 =0
(1)
v
x+0.6
v
z=0
(2)
0.8
vx
–0.6
vy
=–0.6
vBD (3)
Assuming that
VCD
is perpendicular to the axis of rod CD, then
VCD
#r
D
>
C
=0
(
vx
i+
vy
j)+
vz
k)#(0.6i+0.8
j–k)=0
0.6
vx
+0.8
vy
–
vz
=0
(4)
Solving Eqs (1) to (4)
v
x=0.288 rad>s
vy
=–0.816 rad>s
v
z=–0.480 rad>s
v
BD =–1.20 rad>s
Thus
v
BD =5–1.20
j6 rad>s
Ans.
Note:
VBD
can be obtained by solving Eqs 1 to 3 without knowing the direction
of
VAB
.
1083
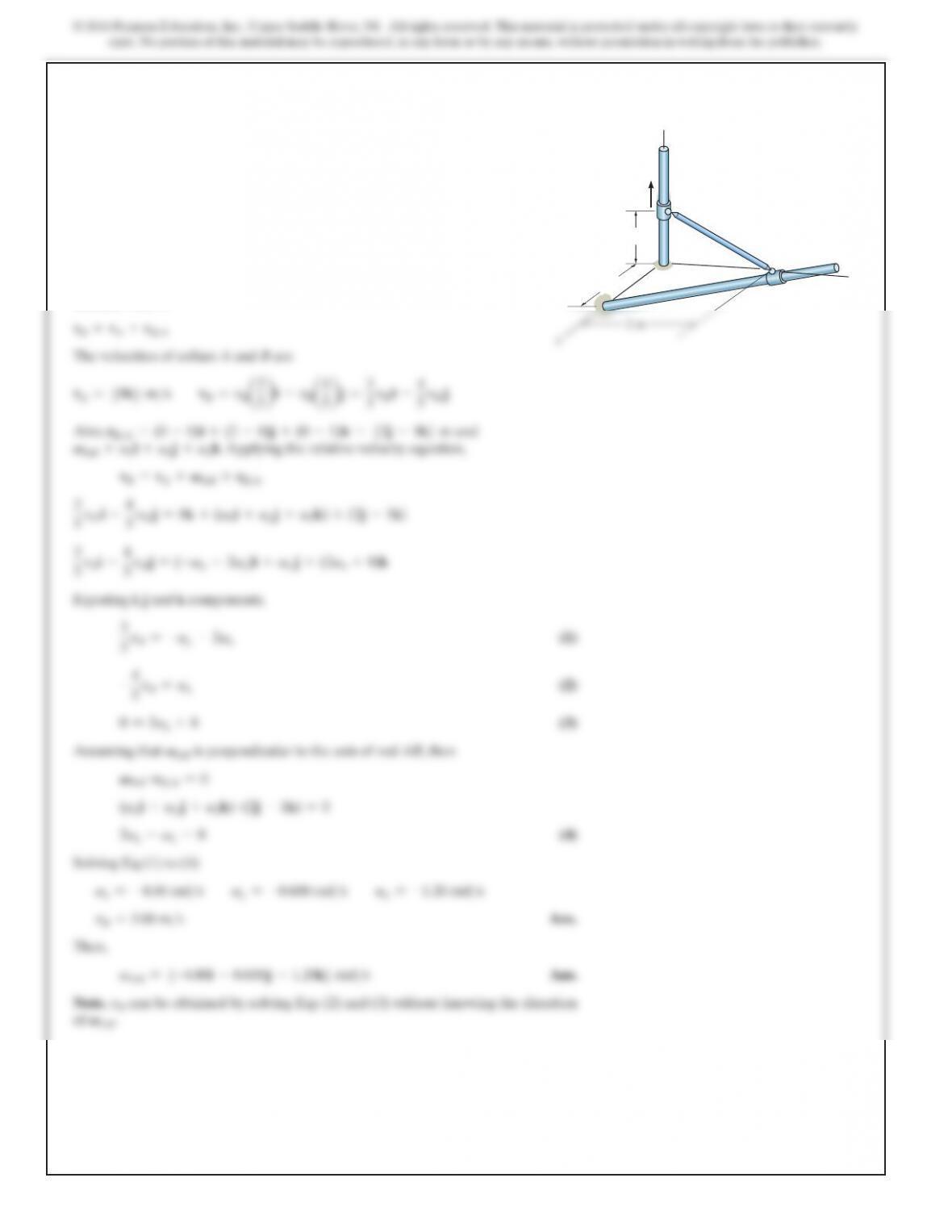
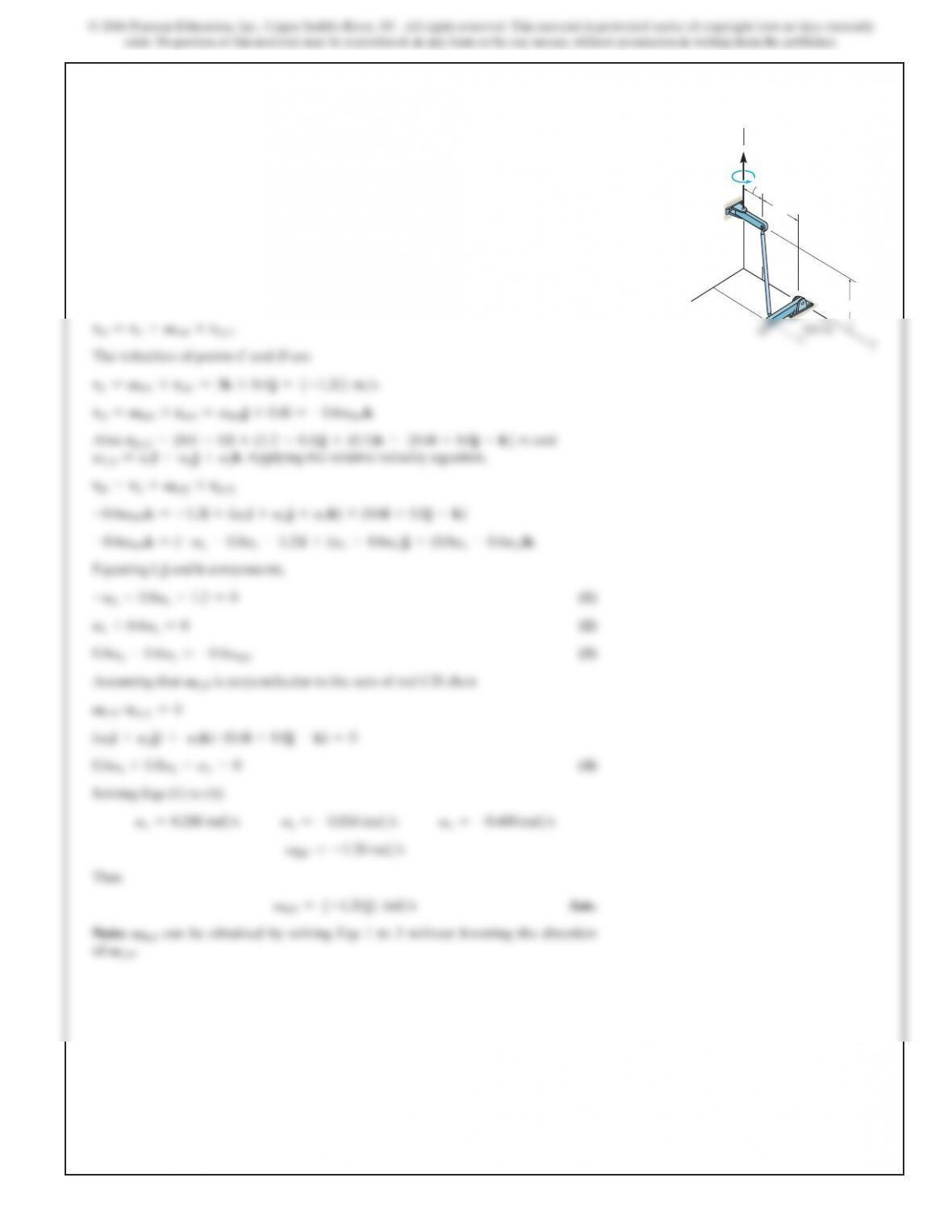
20–34.
Rod CD is attached to the rotating arms using ball-
and-socket joints. If AC has the motion shown,
determine the angular acceleration of link BD at this
instant.
SOLUTION
v
=v
+V
*r
>
The velocities of points C and D are
vC=
V
AC *rAC =3k*0.4
j=5–1.2i6 m>s
vD=
V
BD *rBD =
v
BDj*0.6i=–0.6
v
BDk
Also,
r
D
>
C
=(0.6 –0)i+(1.2 –0.4)j+(0.1)k=50.6i+0.8j–k6 m
and
vCD
=
vx
i+
vy
j+
vz
k
. Applying the relative velocity equation,
v
D
=v
C
+V
CD
*r
D
>
C
–0.6
vBD
k=–1.2i+(
vx
i+
vy
j+
vz
k)*(0.6i+0.8j–k)
–0.6
vBD
k=(–
vy
–0.8
vz
–1.2)i+(
vx
+0.6
vz
)j+(0.8
vx
–0.6
vy
)k
.
Equating i, j and k components,
–
vy
–0.8
vz
–1.2 =0
(1)
v
x+0.6
v
z=0
(2)
0.8
vx
–0.6
vy
=–0.6
vBD (3)
Assuming that
VCD
is perpendicular to the axis of rod CD, then
VCD
#r
D
>
C
=0
(
vx
i+
vy
j)+
vz
k)#(0.6i+0.8j–k)=0
0.6
vx
+0.8
vy
–
vz
=0
(4)
Solving Eqs (1) to (4)
v
x=0.288 rad>s
vy
=–0.816 rad>s
v
z=–0.480 rad>s
v
BD =–1.20 rad>s
Thus
v
BD =5–1.20
j6 rad>s
Ans.
Note:
VBD
can be obtained by solving Eqs 1 to 3 without knowing the direction
of
VCD
.
z
x
0.4 m
0.8 m
1 m
A
B
C
vAC 2 rad/s2
vAC 3 rad/s
