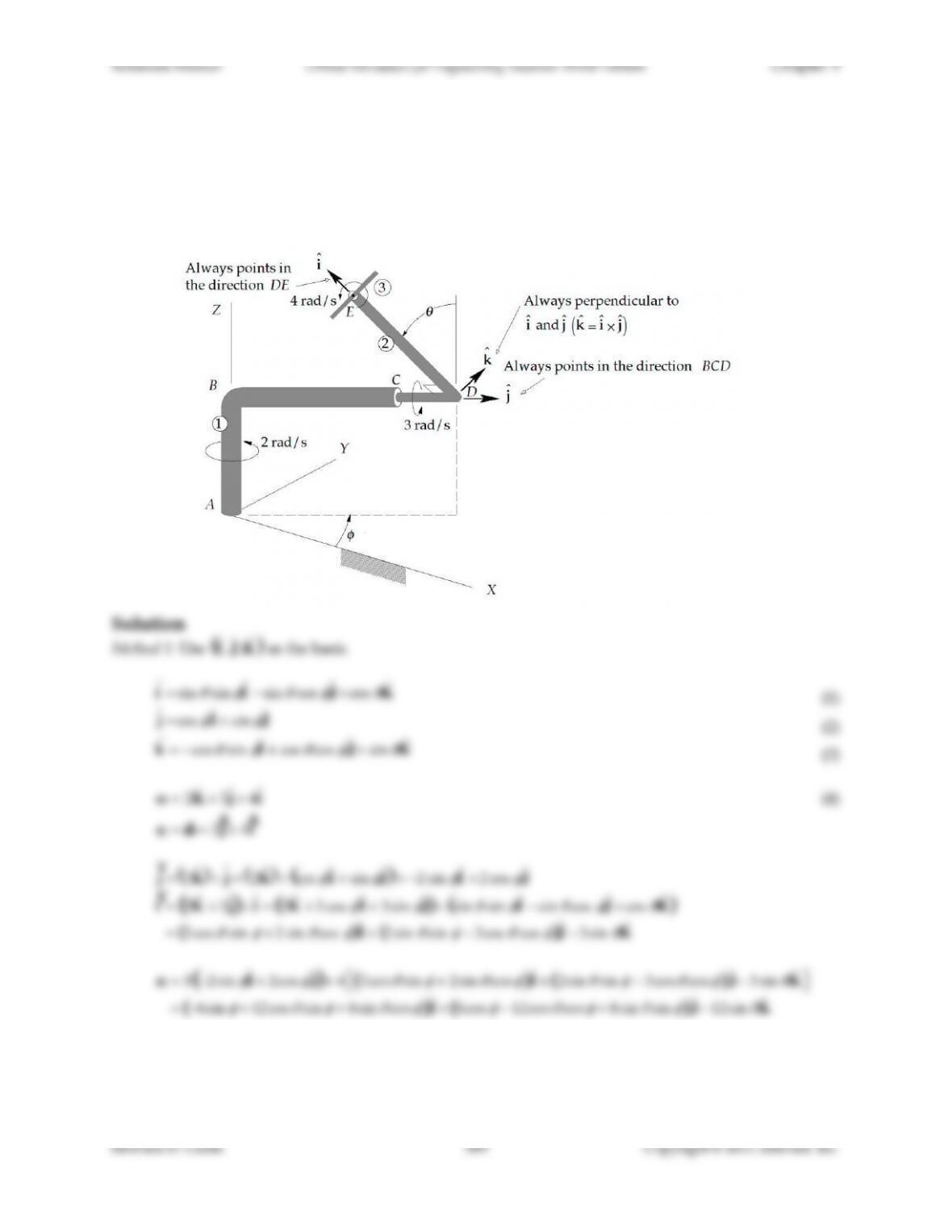
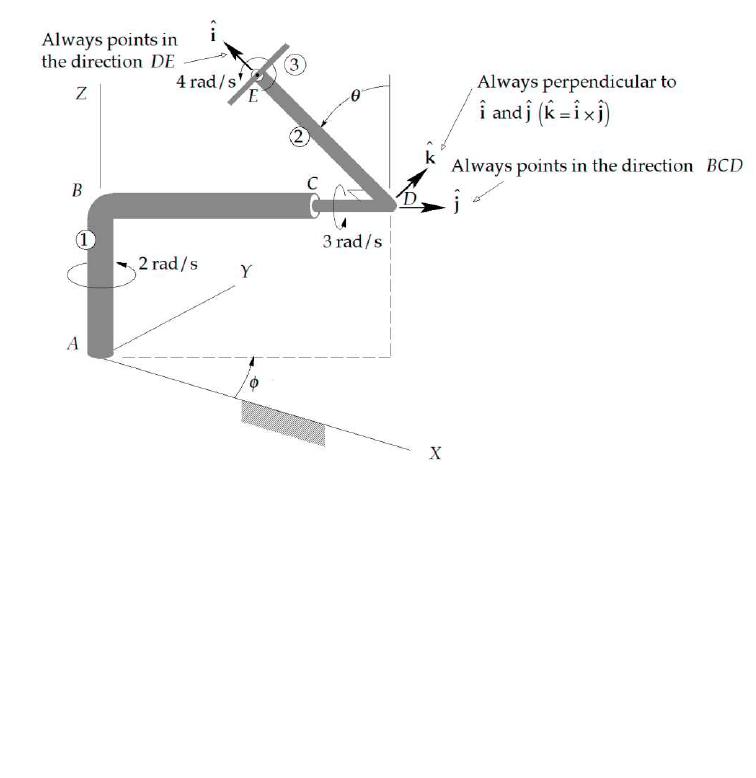
Problem 9.1 Rigid, bent shaft 1 (ABC) rotates at a constant angular velocity of
2ˆ
K
rad/s around the
positive Z axis of the inertial frame. Bent shaft 2 (CDE) rotates around BC with a constant angular velocity
of
3ˆ
j
rad/s, relative to BC. Spinner 3 at E rotates around DE with a constant angular velocity of
4ˆ
i
rad/s
relative to DE. Calculate the magnitude of the absolute angular acceleration
3
of the spinner at the
instant shown.

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9


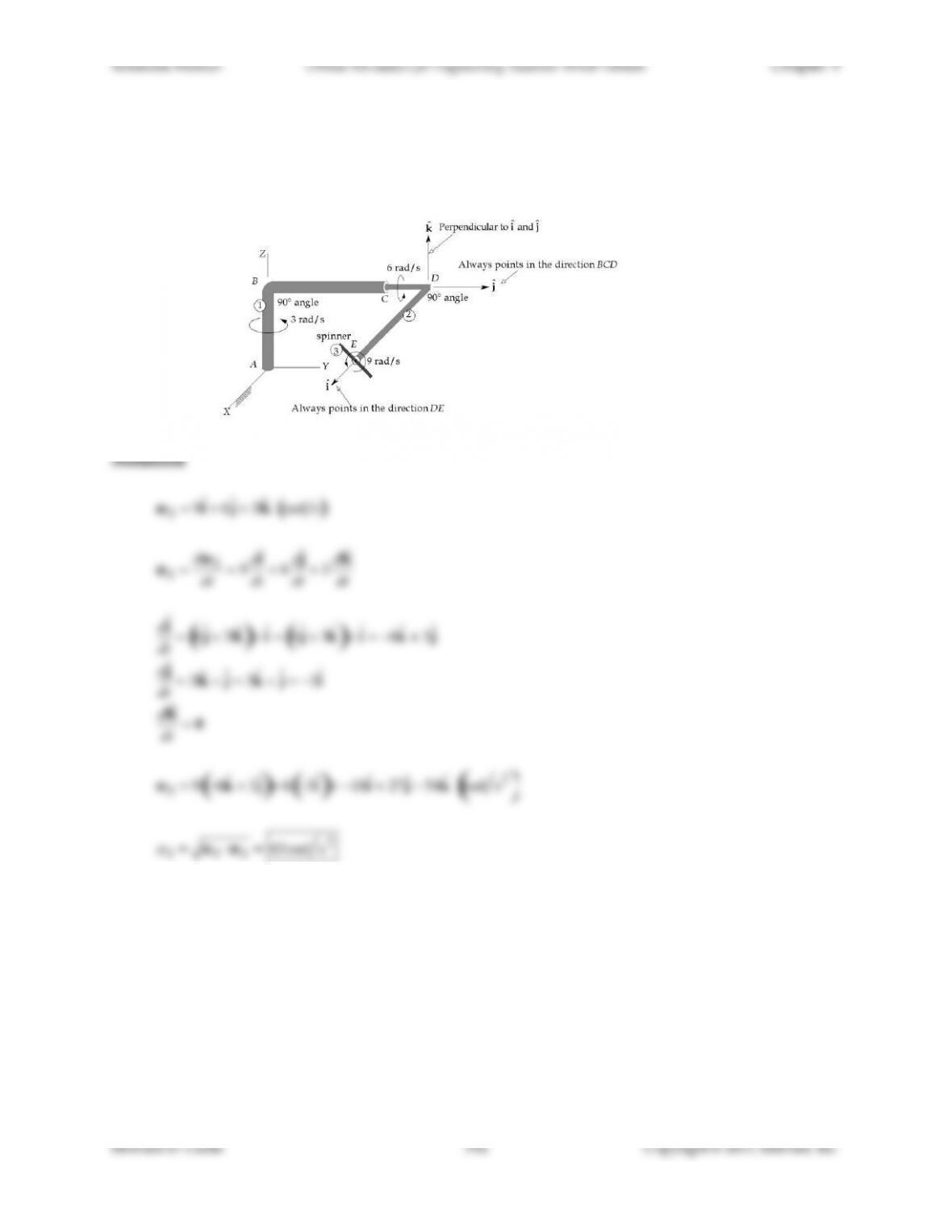
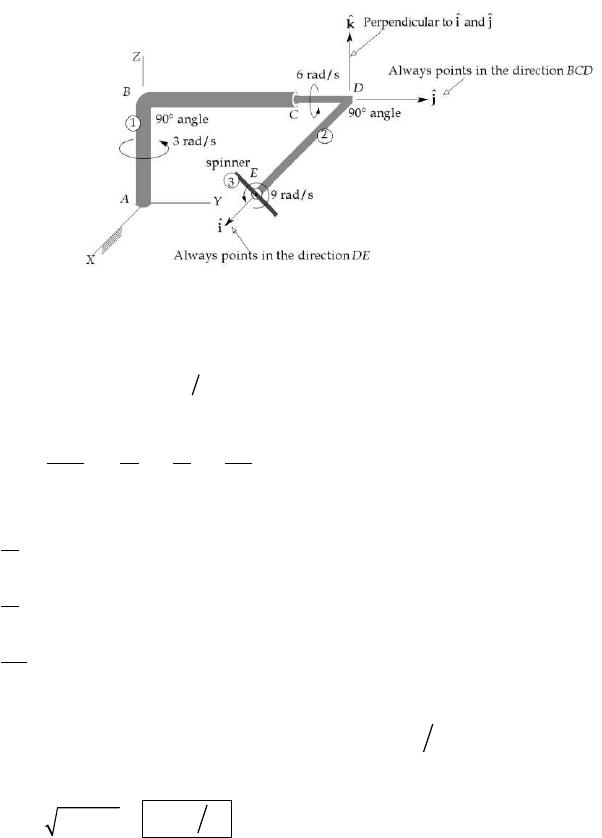
Problem 9.2 All of the spin rates shown are constant. Calculate the magnitude of the absolute angular
acceleration
3
of the spinner at the instant shown (i.e., at the instant when the unit vector
ˆ
i
is parallel
to the X axis and the unit vector
ˆ
j
is parallel to the Y axis).
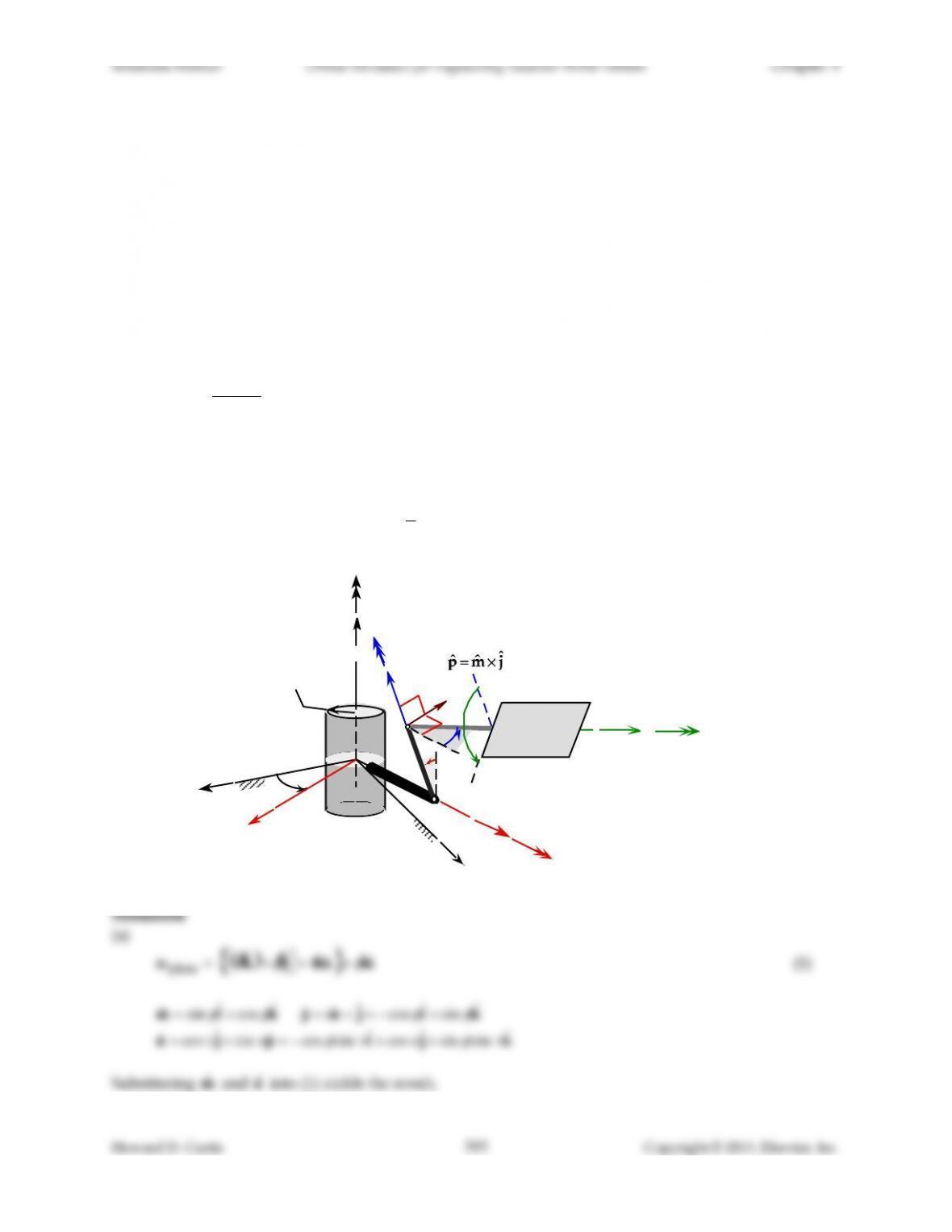
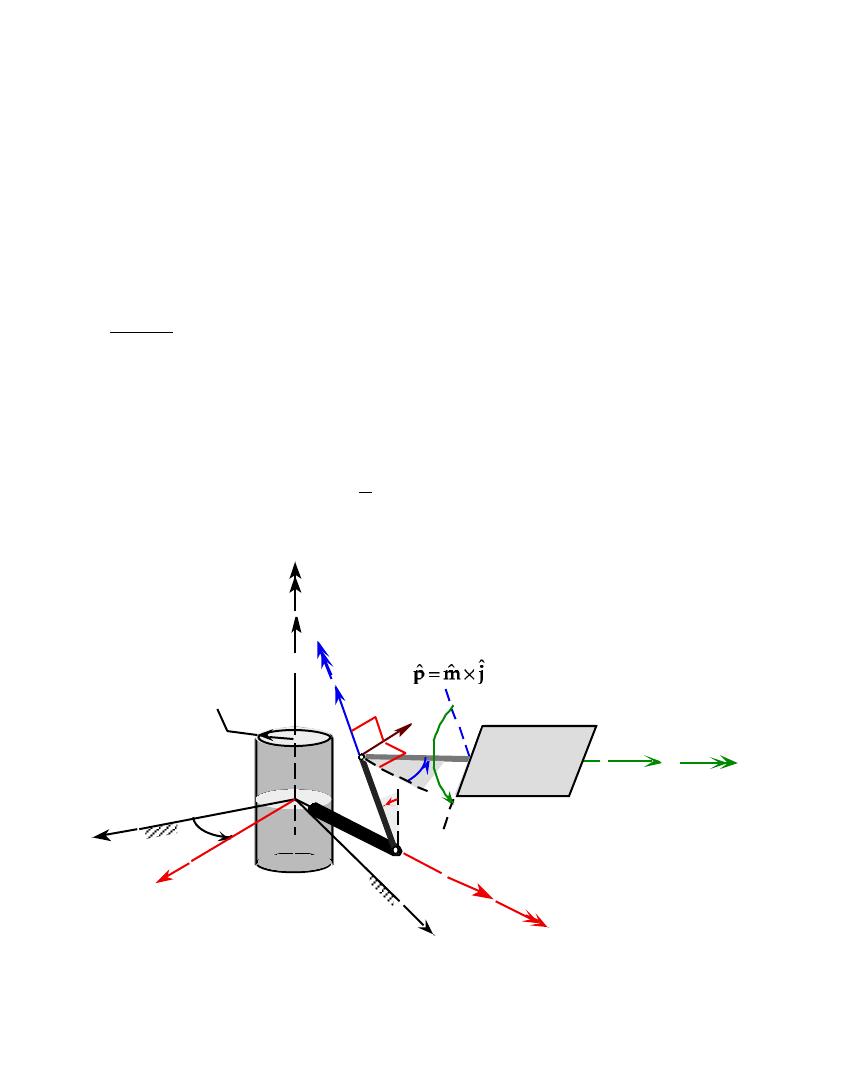
Problem 9.3 The body-fixed xyz frame is attached to the cylinder as shown. The cylinder rotates around
the inertial Z axis, which is collinear with the z axis, with a constant absolute angular velocity
&
ˆ
k
. Rod
AB is attached to the cylinder and aligned with the y-axis. Rod BC is perpendicular to AB and rotates
around AB with the constant angular velocity
&
ˆ
j
relative to the cylinder. Rod CD is perpendicular to BC
and rotates around BC with the constant angular velocity
&
ˆ
m
relative to BC, where
ˆ
m
is the unit vector
in the direction of BC. The plate abcd rotates around CD with a constant angular velocity
&
ˆ
n
relative to
CD, where the unit vector
ˆ
n
points in the direction of CD. Thus, the absolute angular velocity of the plate
is
plate &
ˆ
k&
ˆ
j&
ˆ
m&
ˆ
n
. Show that
(a)
plate &
sin
&
cos
sin
ˆ
i&
&
cos
ˆ
j&
&
cos
&
sin
sin
ˆ
k
(b)
plate dplate
dt &
&
cos
&
cos
cos
&
&
sin
sin
&
&
cos
&
&
ˆ
i
&
&
sin
&
sin
&
&
cos
sin
ˆ
j
&
&
cos
sin
&
&
cos
sin
&
&
sin
ˆ
k
(c)
aC l&
2&
2
sin
ˆ
i2l&
&
cos
5
4l&
2
ˆ
jl&
2cos
ˆ
k
n
ˆ
xy
Z,z
X
Y
Ý
ˆ
m
B
C
ab
c
d
ˆ
iˆ
j
ˆ
I
ˆ
J
ˆ
mˆp
ˆ
K,ˆ
k
Ý
ˆ
k
Ý
ˆ
j
Ý
ˆ
n
ll
l
l
l/ 4
l/ 4
r = l/ 4
O A
D

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9
Problem 9.4 The mass center G of a rigid body has a velocity
vt3ˆ
i4ˆ
j
meters per second and an
angular velocity
2t2ˆ
k
radians per second, where t is time in seconds. The
ˆ
i
,
ˆ
j
,
ˆ
k
unit vectors are
attached to and rotate with the rigid body. Calculate the magnitude of the acceleration
aG
of the center of
mass at t = 2 seconds.

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9
Problem 9.5 Relative to a body-fixed xyz frame
IG
10 0 0
0 20 0
0 0 30
kg m2
and
2t2ˆ
i4ˆ
j3tˆ
k rad s
, where t is the time in seconds. Calculate the magnitude of the net moment
about the center of mass G at
t3 s
.

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9
Problem 9.6 The inertial angular velocity of a rigid body is
x
ˆ
i
y
ˆ
j
z
ˆ
k
, where
ˆ
i
,
ˆ
j
,
ˆ
k
are the
unit vectors of a co-moving frame whose inertial angular velocity is
x
ˆ
i
y
ˆ
j
. Calculate the
components of angular acceleration of the rigid body in the moving frame, assuming that
x
,
y
and
z
are all constant.

Problem 9.7 Find the moments of inertia about the center of mass of the system of six point masses listed
in the table.
Point, i
Mass
mi
(kg)
xi
(m)
yi
(m)
zi
(m)
1
10
1
1
1
2
10
–1
–1
–1
3
8
4
–4
4
4
8
–2
2
–2
5
12
3
–3
–3
6
12
–3
3
3

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9


Problem 9.8 Find the mass moment of inertia of the configuration of Problem 9.7 about an axis through
the origin and the point with coordinates (1m, 2m, 2m).

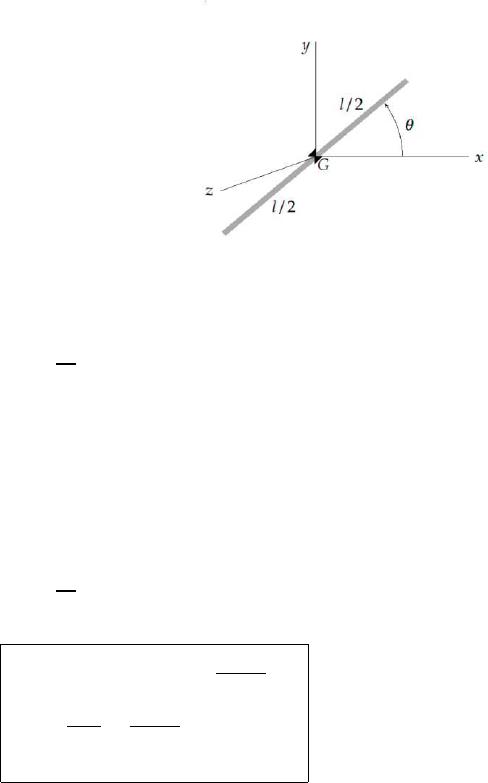
Problem 9.9 A uniform slender rod of mass m and length l lies in the xy plane inclined to the x axis by
the angle
. Use the results of Example 9.10 to find the mass moments of inertia about the xyz axes
passing through the center of mass G.

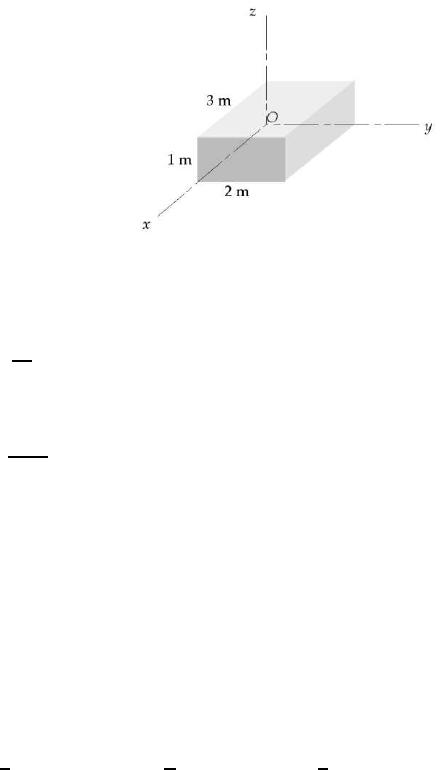
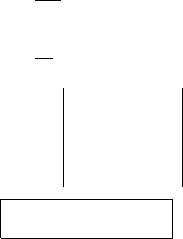
Problem 9.10 The uniform rectangular box has a mass of 1000 kg. The dimensions of its edges are
shown.
(a) Find the mass moments of inertia about the xyz axes.
(b) Find the principal moments of inertia and the principal directions about the xyz axes through
O.
(c) Find the moment of inertia about the line through O and the point with coordinates (3m, 2m,
1m).


Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 9
fprintf(‘\n-––––—––––––—––––––—–––––––—––––—––––––—–––––\n’)



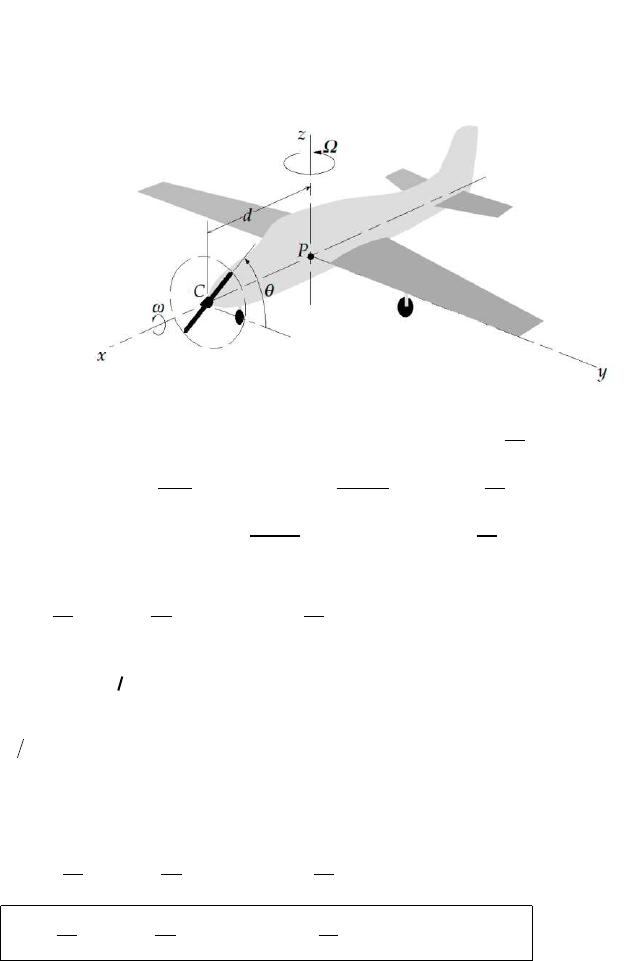
Problem 9.11 A taxiing airplane turns about its vertical axis with an angular velocity
while its
propeller spins at an angular velocity
&
. Determine the components of the angular momentum of the
propeller about the body-fixed xyz axes centered at P. Treat the propeller as a uniform slender rod of
mass m and length l.


Problem 9.12 Relative to an xyz frame of reference the components of angular momentum
H
are given
by
H
1000 0 300
0 1000 500
300 500 1000
x
y
z
kg-m2s
where
x
,
y
and
z
are the components of the angular velocity
. Find the components of
such
that
H1000
, where the magnitude of
is 20 radians/second.