
I9000ˆ
J3000 ˆ
Problem 4.1 For each of the following geocentric equatorial position vectors (in kilometers) find the
right ascension and declination.
(a)
r9000ˆ
I6000ˆ
J3000 ˆ
K

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 4
cos
360 cos10.534522
cos 15.5014
360 56.3099 303.69

Problem 4.2 At a given instant, a spacecraft is 500 km above the earth, with a right ascension of 300°
and declination of –20° relative to the geocentric equatorial frame. Its velocity is 10 km/s directly north,
normal to the equatorial plane. Find its right ascension and declination 30 minutes later.
cos
cos10.433077
cos 29.9853
120

Problem 4.3 Find the orbital elements of a geocentric satellite whose inertial position and velocity vec-
tors in a geocentric equatorial frame are
r2500ˆ
I16,000ˆ
J4000 ˆ
K km
v 3ˆ
Iˆ
J5ˆ
K km s

Problem 4.4 At a given instant the position
r
and velocity
v
of a satellite in the geocentric equatorial
frame are
r 13,000 ˆ
K (km)
and
v4ˆ
i5ˆ
J6ˆ
K (km/ s)
. Find the orbital elements.
(13)
360 cos1er
er
360 74.939 285.06

Problem 4.5 At time
t0
(relative to perigee passage) the position
r
and velocity
v
of a satellite in the
geocentric equatorial frame are
r6500ˆ
I7500ˆ
J2500 ˆ
K (km)
and
v4ˆ
I3ˆ
J3ˆ
K (km/ s)
. Find the or-
bital elements.
Ne
(13)
cos1er
er
134.73

Problem 4.6 Given that, with respect to the geocentric equatorial frame,
r 6000ˆ
I1000ˆ
J5000 ˆ
K
(km),
v6ˆ
I7ˆ
J2ˆ
K
(km/s)
and the eccentricity vector is
e 0.4ˆ
I0.5ˆ
J0.6 ˆ
K
,
calculate the true anomaly
of the earth-orbiting satellite.
6909.41
360 cos10.853907
360 31.3608 328.639

Problem 4.7 Given that, relative to the geocentric equatorial frame
r 6600ˆ
I1300ˆ
J5200 ˆ
K km
,
the eccentricity vector is
e 0.4ˆ
I0.5ˆ
J0.6 ˆ
K
,
and the satellite is flying towards perigee, calculate the inclination of the orbit.
i43.2661
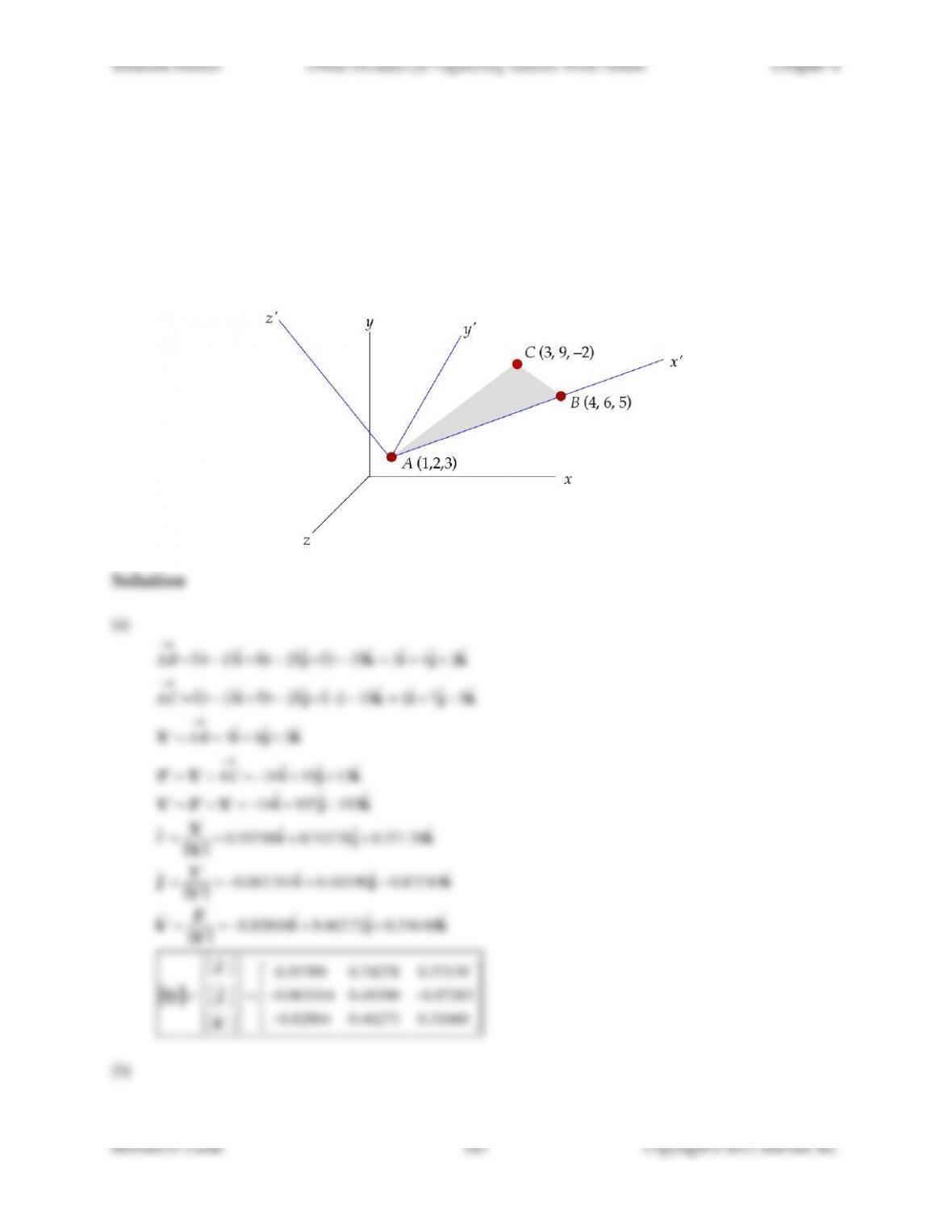
Problem 4.8 The right-handed, primed xyz system is defined by the three points A, B and C. The x’y’
plane is defined by the plane ABC. The
x
axis runs from A through B. The
z
axis is defined by the cross
product of
A B
into
A C
, so that the
y
axis lies on the same side of the
x
axis as point C.
(a) Find the direction cosine matrix
Q
relating the two coordinate bases.
(b) If the components of a vector
v
in the primed system are
21 3
T
, find the components
of
v
in the unprimed system.

T
0.55709 0.063314 0.82804
2
1.3066
v 1.3066ˆ

Problem 4.9 The unit vectors in a uvw Cartesian coordinate frame have the following components in
the xyz frame:
ˆ
u0.26726ˆ
i0.53452ˆ
j0.80178 ˆ
k
ˆ
v 0.44376ˆ
i0.80684ˆ
j0.38997 ˆ
k
ˆ
w 0.85536ˆ
i0.25158ˆ
j0.45284 ˆ
k
If, in the xyz frame
V 50ˆ
i100ˆ
j75 ˆ
k
, find the components of the vector
V
in the uvw frame.
V100.22 ˆ

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 4
Problem 4.10 Calculate the direction cosine matrix
Q
for the sequence of two rotations:
40
about the positive X axis, followed by
25
about the positive
y
axis. The result is that the XYZ axes
are rotated into the
x
y
z
axes.

Problem 4.11 For the direction cosine matrix
Q
0.086824 0.77768 0.62264
0.49240 0.57682 0.65178
0.86603 0.25000 0.43301
calculate,
(a) the classical Euler angle sequence
(b) the yaw, pitch and roll angle sequence.
276.37

sin 1Q13
sin 10.62264
236.40

Problem 4.12 What yaw, pitch and roll sequence yields the same DCM as the classical Euler sequence
350
,
170
,
300
?
174.96

Problem 4.13 What classical Euler angle sequence yields the same DCM as the yaw-pitch-roll sequence
300
,
80
,
30
?
84.962

Problem 4.14 At time
t0
the position
r
and velocity
v
of a satellite in the geocentric equatorial frame
are:
r 5000ˆ
I8000ˆ
J2100 ˆ
K km
v 4ˆ
I3.5ˆ
J3ˆ
K km s
Find
r
and
v
at time
t050 minutes
. (
t00!
)
8

h
0
398,600
58,963
0
0
km s