
SOLUTIONS MANUAL
to accompany
ORBITAL MECHANICS FOR ENGINEERING STUDENTS
Third Edition
Howard D. Curtis
Embry-Riddle Aeronautical University
Daytona Beach, Florida

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 1
Problem 1.1 Given the three vectors
AAx
ˆ
iAy
ˆ
jAz
ˆ
k
,
BBx
ˆ
iBy
ˆ
jBz
ˆ
k
and
CCx
ˆ
iCy
ˆ
jCz
ˆ
k
,
show analytically that
(a)
AAA2
(b)
ABC
AB
C
(c)
ABC
B A C
C A B

ABC
Ax
ˆ
iAy
ˆ
jAz
ˆ
k
ˆ
iˆ
jˆ
k
BxByBz
CxCyCz
ˆ
iˆ
jˆ
k
AxAyAz
ByCzBzCyBzCxBxCyBxCyByCx
AyBxCyByCx
AzBzCxBxCz
ˆ
iAzByCzBzCy
AxBxCyByCx
ˆ
j
AxBzCxBxCz
AyByCzBzCy
ˆ
k
AyBxCyAzBxCzAyByCxAzBzCx
ˆ
iAxByCxAzByCzAxBxCyAzBzCy
ˆ
j
AxBzCxAyBzCyAxBxCzAyByCz
ˆ
k
BxAyCyAzCz
CxAyByAzBz
ˆ
iByAxCxAzCz
CyAxBxAzBz
ˆ
j
BzAxCxAyCy
CzAxBxAyBy
ˆ
k
Add and subtract the underlined terms to get
ABC
BxAyCyAzCzAxCx
CxAyByAzBzAxBx
ˆ
i
ByAxCxAzCzAyCy
CyAxBxAzBzAyBy
ˆ
j
BzAxCxAyCyAzCz
CzAxBxAyByAzBz
ˆ
k
Bx
ˆ
iBy
ˆ
jBz
ˆ
k
AxCxAyCyAzCz
Cx
ˆ
iCy
ˆ
jCz
ˆ
k
AxBxAyByAzBz
Bx
ˆ
iBy
ˆ
jBz
ˆ
k
AC
Cx
ˆ
iCy
ˆ
jCz
ˆ
k
AB
Or,
ABC
B A C
C A B

Problem 1.2 Use just the vector identities in Problem 1.1 to show that
AB
CD
AC
BD
AD
BC
AB

CAB 11.575

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 1
Problem 1.4 Since
ˆ
ut
and
ˆ
un
are perpendicular and
ˆ
utˆ
unˆ
ub
, use the bac-cab rule to show that
ˆ
ubˆ
utˆ
un
and
ˆ
unˆ
ubˆ
ut
, thereby verifying Equation 1.29.

Problem 1.5 The x, y and z coordinates (in meters) of a particle as a function of time (in seconds) are
xsin 3t
,
ycost
and
zsin 2t
. At
t3s
determine:
(a) The velocity v, in Cartesian coordinates.
(b) The speed v.
(c) The unit tangent
ˆ
ut
.
(d) The angles
x
,
y
and
z
that v makes with the x, y and z axes.
(e) The acceleration a in Cartesian coordinates.
(f) The unit binormal vector
ˆ
ub
.
(g) The unit normal vector
ˆ
un
.
(h) The angles
x
,
y
and
z
that a makes with the x, y and z axes.
(i) The tangential component
at
of the acceleration.
(j) The normal component
an
of the acceleration.
(k) The radius of curvature of the path of P.
(l) The Cartesian coordinates of the center of curvature of the path.
Solution

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 1
y92.601
zcos1az
a
cos12.1761
6.2505
z69.626
(i)
ataˆ
ut 5.8526ˆ
i0.28366ˆ
j2.1761 ˆ
k
0.76267ˆ
i0.32089ˆ
j0.56157 ˆ
k
at3.1505 m s2
(j)

Solutions Manual Orbital Mechanics for Engineering Students Third Edition Chapter 1
anaˆ
un 5.8526ˆ
i0.28366ˆ
j2.1761 ˆ
k
0.63904ˆ
i0.23982ˆ
j0.73083 ˆ
k
r
C 0.40678ˆ

Problem 1.6 An 80 kg man and 50 kg woman stand 0.5 meter from each other. What is the force of
gravitational attraction between the couple?
F1.0679 106 N

Problem 1.7 If a person’s weight is W on the surface of the earth, calculate the earth’s gravitational pull
on that person at a distance equal to the moon’s orbit.
F0.0002753W

Problem 1.8 If a person’s weight is W on the surface of the earth, calculate what it would be, in terms
of W, at the surface of
(a) the moon
(b) Mars
(c) Jupiter
Solution
WMars 0.3790W

Problem 1.9 A satellite of mass m is in a circular orbit around the earth, whose mass is M. The orbital
radius from the center of the earth is r. Use Newton’s Second Law of motion, together with Equations
1.25 and 1.40, to calculate the speed v of the satellite in terns of M, r and the gravitational constant G.
Solution
r
r

Problem 1.10 If the earth takes 365.25 days to complete its circular orbit of radius
149.6 106 km
around the sun, use the result of Problem 1.9 to calculate the mass of the sun.
2
r

Problem 1.11 F is a force vector of fixed magnitude embedded on a rigid body in plane motion (in the
xy plane). At a given instant
2ˆ
k rad s
,
&
5ˆ
k rad s2
,
&&
3ˆ
k rad s3
and
F15ˆ
i10ˆ
j N
. At that
instant calculate
&&&
F
.
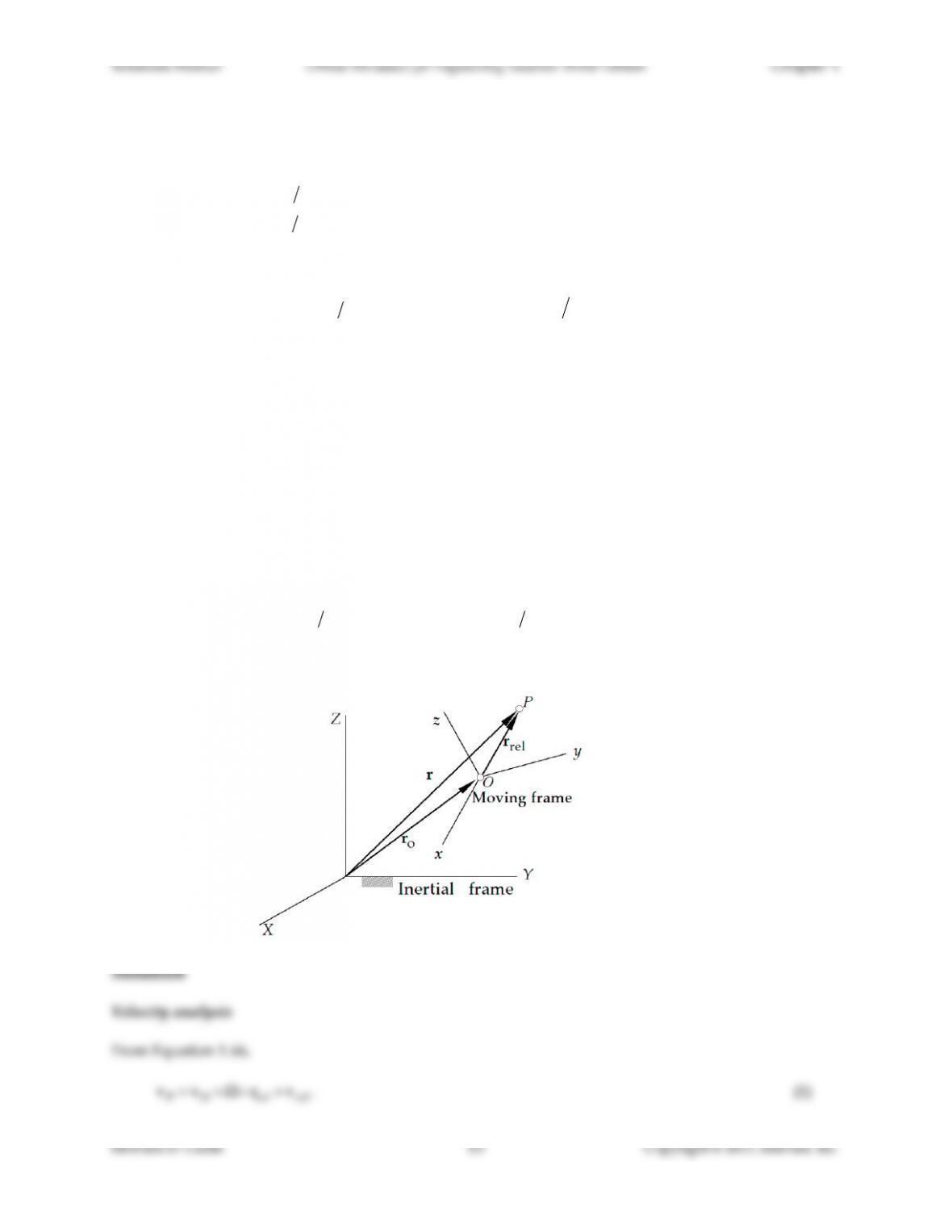
Problem 1.12 The absolute position, velocity and acceleration of O are
r
O 16ˆ
I84ˆ
J59 ˆ
K (m)
vO7ˆ
I9ˆ
J4ˆ
K (m s)
aO3ˆ
I7ˆ
J4ˆ
K (m s2)
The angular velocity and acceleration of the moving frame are
0.8ˆ
I0.7ˆ
J0.4 ˆ
K (rad s) &
0.4ˆ
I0.9ˆ
J1.0 ˆ
K (rad s2)
The unit vectors of the moving frame are
ˆ
i 0.15617ˆ
I0.31235ˆ
J0.93704 ˆ
K
ˆ
j 0.12940I0.94698ˆ
J0.29409 ˆ
K
ˆ
k 0.97922I0.075324ˆ
J0.18831 ˆ
K
The absolute position of P is
r51ˆ
I45ˆ
J36 ˆ
K (m)
The velocity and acceleration of P relative to the moving frame are
vrel 31ˆ
i68ˆ
j77 ˆ
k (m s) arel 2ˆ
i6ˆ
j5ˆ
k (m s)
Calculate the absolute velocity
vP
and acceleration
aP
of P.
vPvOr
rel vrel

aO3ˆ

&
ˆ
Iˆ
Jˆ
K
79.358 68.277 23.55
arel 2ˆ
i6ˆ
j5ˆ
k
20.15617ˆ
I0.31235ˆ
J0.93704 ˆ
K
60.12940ˆ
I0.94698ˆ
J0.29409 ˆ
K
50.97922ˆ
I0.075324ˆ
J0.18831 ˆ
K
arel 4.432ˆ
I6.6832ˆ
J0.83202 ˆ
K
(11)
Substituting (7), (8), (9), (10) and (11) into (6) yields
a3ˆ
I7ˆ
J4ˆ
K
a0
6 744 84 4
149.7ˆ
I76.2ˆ
J8.7 ˆ
K
&
r
rel
6 74 4 4 4 84 4 4 4
36.05ˆ
I59.24ˆ
J31.57 ˆ
K
r
rel
6 74 4 4 44 84 4 4 4 4
87.592ˆ
I101.17ˆ
J1.857 ˆ
K
2vrel
6 74 4 4 4 4 84 4 4 4 4
4.432ˆ
I6.6832ˆ
J0.83202 ˆ
K
arel
6 74 4 4 4 44 84 4 4 4 4 4
a85.129 0.32292ˆ
I0.82842ˆ
J0.45765 ˆ
K
m s2