
PROBLEM 18.141* (Continued)
Given data: 217
011
g
a
Substituting into Eq. (6),
17 10 cos cos 1.7sin
gg

Copyright © McGraw-Hill Education. Permission required for reproduction or display.
PROBLEM 18.142*
A homogeneous sphere of mass m and radius a is welded to a rod AB of negligible
mass, which is held by a ball-and-socket support at A. The sphere is released in the
position 0
with a rate of precession 0
with no spin or nutation. Knowing
that the largest value of
in the ensuing motion is 30°, determine (a) the rate of
precession 0
of the sphere in its initial position, (b) the rates of precession and spin
when 30 .

PROBLEM 18.142* (Continued)
We now write constant:
z
H
2
2(sin)constant
5
z
Hma
We have
222
1()
2
25 5 5
xx yy zz
TI I I
and, selecting the datum at 0:
2sin
Vmga
0
a
Substituting for sin
from Eq. (2) into Eqs. (1) and (3),
Eq. (3): 22 2 2
0
11 cos 11 10 sin 11
a
(3 )
Solving (1 )
for ,
(4)
22 2 2 2
00
11( sec ) cos 11 10 sin 11
a
(5)
For the maximum value of ,
we have 0
and Eq. (5) yields
2
02
110
1sin
11
cos
g
a
2
2
010 cos
11 sin
g
a
(6)
PROBLEM 18.142* (Continued)

(a) Making 30
in Eq. (6), we have
2
010 0.75 15
11 0.5 11
g
g
aa
015
11
g
a
(b) Substituting for
0
in Eq. (4), and making 30 :
g
g
g
g

PROBLEM 18.143*
Consider a rigid body of arbitrary shape which is attached at its mass center O
and subjected to no force other than its weight and the reaction of the support at
O.
(a) Prove that the angular momentum O
Hof the body about the fixed Point O is
constant in magnitude and direction, that the kinetic energy T of the body is
constant, and that the projection along O
Hof the angular velocity of the body
is constant.
(b) Show that the tip of the vector describes a curve on a fixed plane in space
(called the invariable plane), which is perpendicular to HO and at a distance
2/ O
TH from O.
(c) Show that with respect to a frame of reference attached to the body and
coinciding with its principal axes of inertia, the tip of the vector appears to
describe a curve on an ellipsoid of equation
222
2 constant
xx yy zz
III T
The ellipsoid (called the Poinsot ellipsoid ) is rigidly attached to the body and is
of the same shape as the ellipsoid of inertia, but of a different size.

PROBLEM 18.143* (Continued)
(b) cos
is the perpendicular distance from the invariable plane. This distance is equal to
2
.
O
T
H
(c) For a frame of reference attached to the body, the moments of inertia with respect of orthogonal axes

PROBLEM 18.144*
Referring to Problem 18.143, (a) prove that the Poinsot ellipsoid is tangent to the
invariable plane, (b) show that the motion of the rigid body must be such that the
Poinsot ellipsoid appears to roll on the invariable plane. [Hint: In part a, show that
the normal to the Poinsot ellipsoid at the tip of is parallel to
.
O
H
It is recalled
that the direction of the normal to a surface of equation ( , , ) constantFx y z
at a
Point P is the same as that of grad F at Point P.]
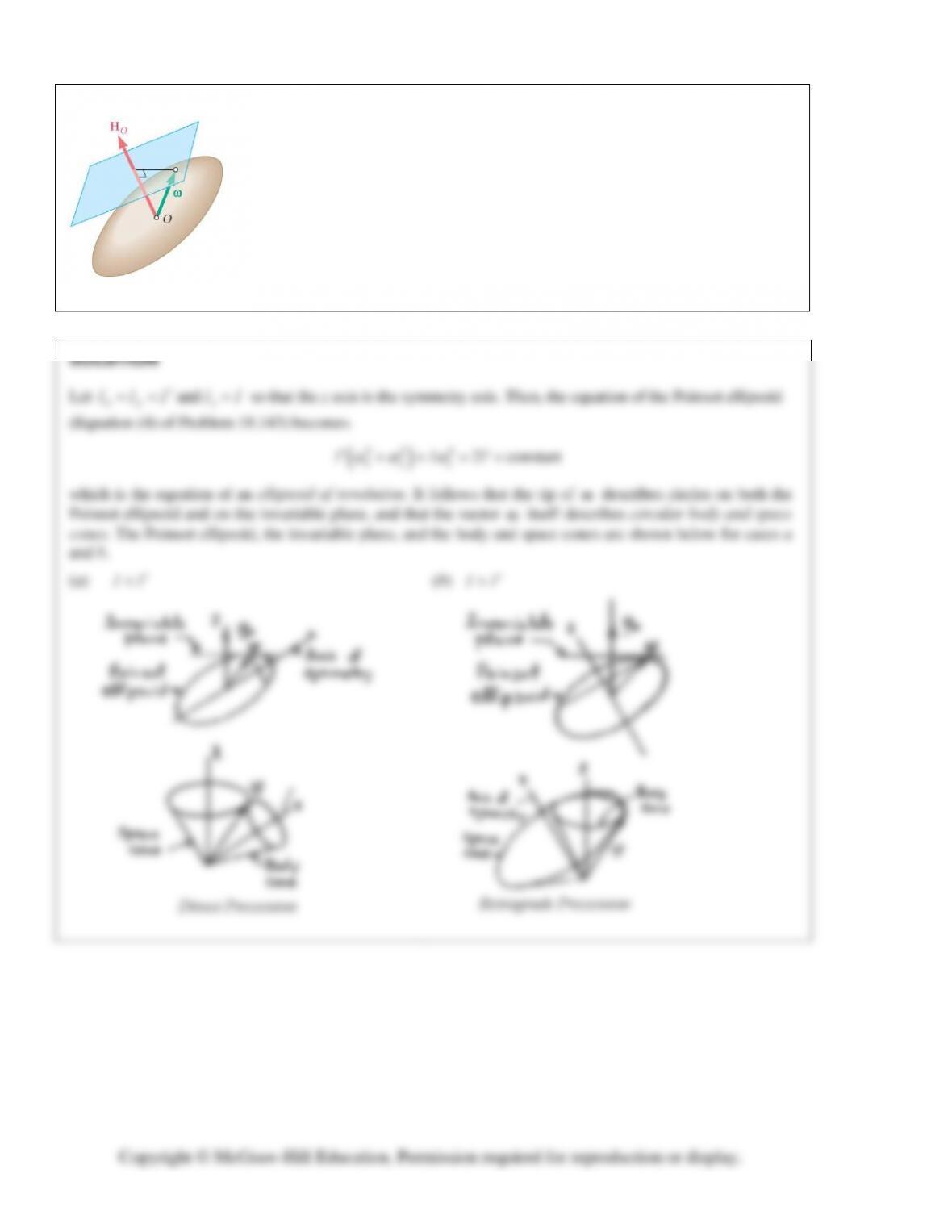
PROBLEM 18.145*
Using the results obtained in Problems 18.143 and 18.144, show that for an
axisymmetrical body attached at its mass center O and under no force other than
its weight and the reaction at O, the Poinsot ellipsoid is an ellipsoid of revolution
and the space and body cones are both circular and are tangent to each other.
Further show that (a) the two cones are tangent externally, and the precession is
direct, when ,II
where I and I
denote, respectively, the axial and transverse
moment of inertia of the body, (b) the space cone is inside the body cone, and the
precession is retrograde, when .
I
I

PROBLEM 18.146*
Refer to Problems 18.143 and 18.144.
(a) Show that the curve (called polhode) described by the tip of the vector
with respect to a frame of reference coinciding with the principal axes of
inertia of the rigid body is defined by the equations
222
2 constant
xx yy zz
III T
(1)
22 22 22 2 constant
xx yy zz O
IIIH
(2)
and that this curve can, therefore, be obtained by intersecting the Poinsot
ellipsoid with the ellipsoid defined by Eq. (2).
(b) Further show, assuming ,
x
yz
III that the polhodes obtained for
various values of O
H have the shapes indicated in the figure.
(c) Using the result obtained in part b, show that a rigid body under no force
can rotate about a fixed centroidal axis if, and only if, that axis coincides
with one of the principal axes of inertia of the body, and that the motion will
be stable if the axis of rotation coincides with the major or minor axis of the
Poinsot ellipsoid (z or x axis in the figure) and unstable if it coincides with
the intermediate axis (y axis).
x

PROBLEM 18.146* (Continued)
(b) Assume .
x
yz
III
Then 111 2 2 2
and .abc a bc
is more pronounced in the second ellipsoid.
The largest ellipsoid of the second type to be in contact with the Poinsot ellipsoid will lie outside that
ellipsoid and touch it at its points of intersection with the x axis, and the smallest will lie inside the
Poinsot ellipsoid and touch it at its points of intersection with the z axis (see left-hand sketch). All
ellipsoids of the second type comprised between these two will intersect the Poinsot ellipsoid along the
(c) If the body is set to spin about one of the principal axes, the Poinsot ellipsoid will remain in contact
with the invariable plane at the same point (on the x, y, or z axis); the rotation is steady. In any other
case, the point of contact will be located on one of the polhodes, and the tip of
will start describing
that polhode, while the Poinsot ellipsoid rolls on the invariable plane.