PROBLEM 15.244
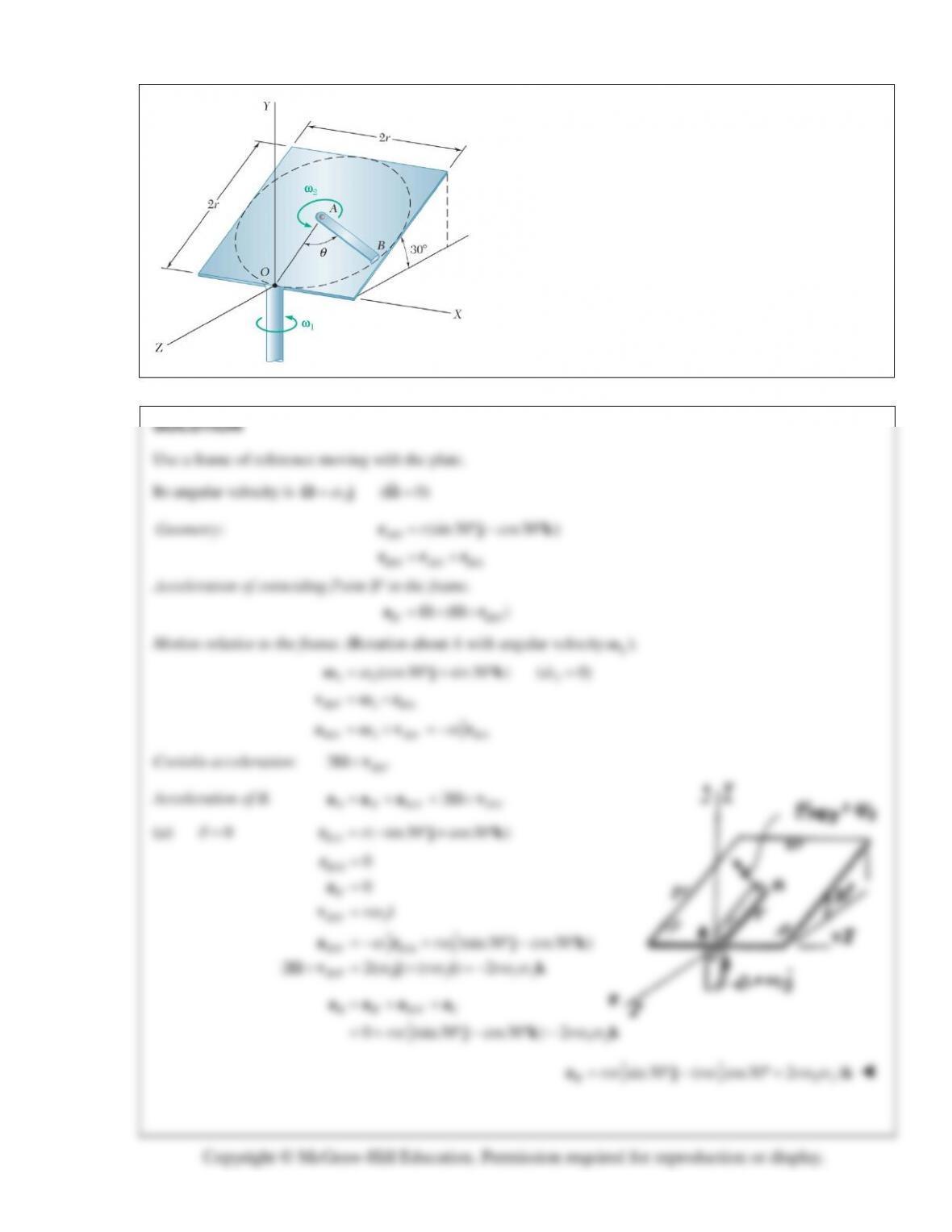
A square plate of side 2r is welded to a vertical shaft that
rotates with a constant angular velocity
1
.ω
At the same
time, rod AB of length r rotates about the center of the
plate with a constant angular velocity
2
ω
with respect to
the plate. For the position of the plate shown, determine
the acceleration of end B of the rod if (a)
0,
θ
=
(b)
90 ,
θ
= °
(c)
180 .
θ
= °
ω
PROBLEM 15.244 (Continued)
(b)
90
θ
= °
/
/
sin30 cos30
BA
BO
r
rr r
=
= + °− °
ri
ri j k

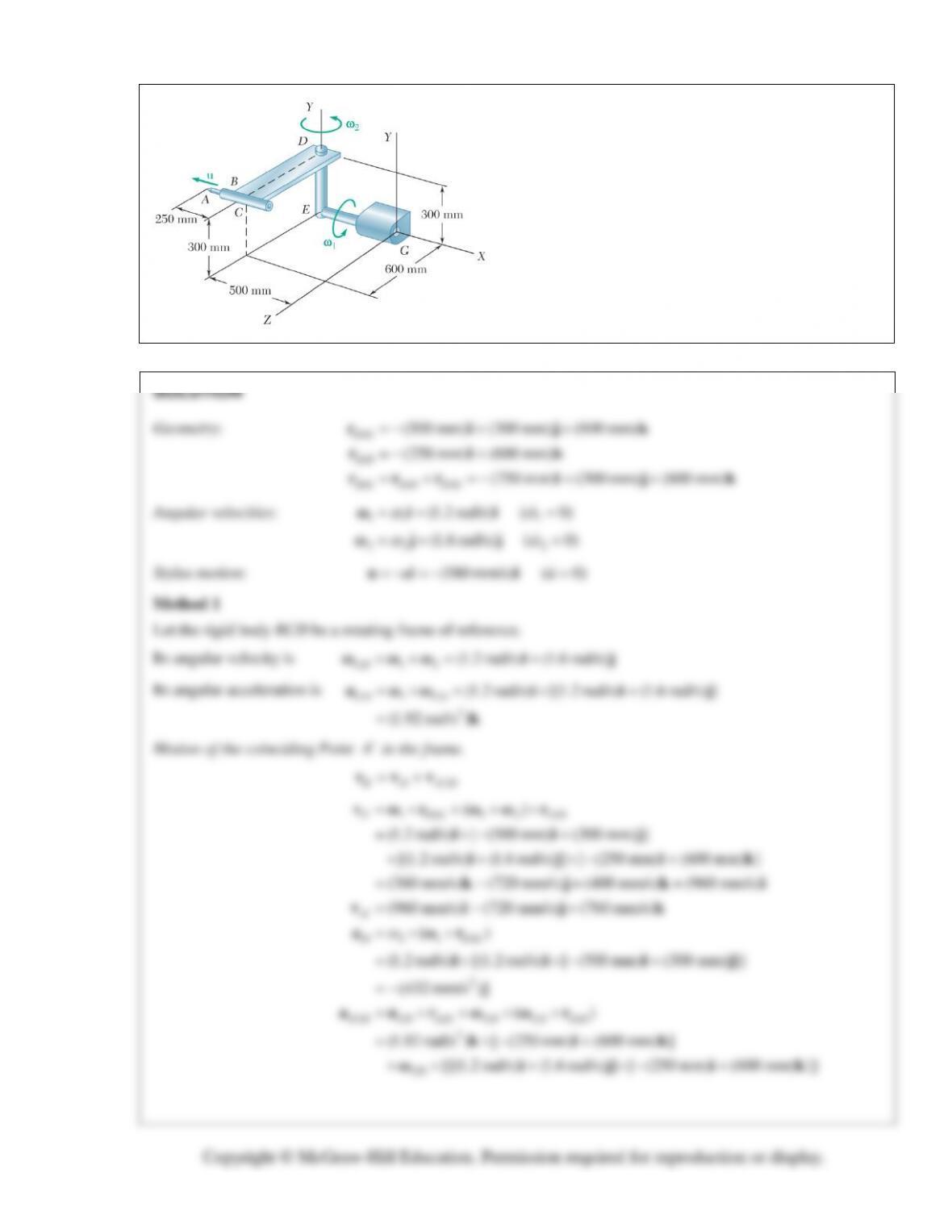
PROBLEM 15.245
Two disks, each of 130–mm radius, are welded to the 500–mm rod
CD. The rod–and–disks unit rotates at the constant rate
ω
2
3 rad/s=
with respect to arm AB. Knowing that at the instant shown
1
4 rad/s,
ω
=
determine the velocity and acceleration of (a) Point
E, (b) Point F.

PROBLEM 15.245 (Continued)
(b) Point F.
/
/
(0.25 m) (0.13 m)
(0.13 m)
FB
FD
= +
=
r ik
rk

PROBLEM 15.246
In Problem 15.245, determine the velocity and acceleration of
(a) Point G, (b) Point H.
PROBLEM 15.245 Two disks, each of 130–mm radius, are welded
to the 500–mm rod CD. The rod–and–disks unit rotates at the
constant rate
ω
2
3 rad/s=
with respect to arm AB. Knowing that at
the instant shown
1
4 rad/s,
ω
=
determine the velocity and
acceleration of (a) Point E, (b) Point F.

PROBLEM 15.246 (Continued)
Acceleration of Point G.
/G G GF c
′
=++aaa a
4 1.17 3.12
G
=−+ai j i
22
(7.12 m/s ) (1.170 m/s )
G
= −
a ij
PROBLEM 15.247
The position of the stylus tip A is controlled by the
robot shown. In the position shown the stylus moves at
a constant speed
180 mm/su=
relative to the solenoid
BC. At the same time, arm CD rotates at the constant
rate
2
1.6 rad/s
ω
=
with respect to component DEG.
Knowing that the entire robot rotates about the X axis at
the constant rate
1
1.2 rad/s,
ω
=
determine (a) the
velocity of A, (b) the acceleration of A.

PROBLEM 15.247 (Continued)
2
/
22 2
/
(480 mm/s ) [ (720 mm/s) (400 mm/s) (960 mm/s) ]
480 1.2 1.6 0
960 720 400
480 640 480 864 1536
(640 mm/s ) (960 mm/s ) (2400 mm/s )
A D CD
AD
ω
′
′
=− + ×− + +
=−+
−
=−+ − − −
=−−
a j jki
i jk
j
ji jk k
a ij k
/
22 2
(640 mm/s ) (1392 mm/s ) (2400 mm/s )
A D AD
A
′′
′
= +
=−−
aaa
a ijk
Motion of Point A relative to the frame.
/
/
(180 mm/s)
0
AF
AF
= = −
=
vu i
a
1/
(1.2 rad/s) [ (500 mm) (300 mm) (600 mm) ]
(360 mm/s) (720 mm/s)
A AG
′= × = ×− + +
= −
vωr i i j k
kj
1 1/ 1
()
A AG A
ω
′′
=×× =×
aωr ωv

PROBLEM 15.247 (Continued)
Motion of Point A relative to the frame.
/ 2/
(1.6 rad/s) [ (250 mm) (600 mm) ] (180 mm/s)
(400 mm/s) (960 mm/s) (180 mm/s)
AF AD
=×+
= ×− + −
= +−
vωr u
j ik i
kii
/
:
AF
a
(Since A moves on CD, which rotates at rate
2
,ω
we have a Coriolis term here).
/ 2 2/ 2
22
2 22
22
( )2
{(1.6 rad/s) [ (250 mm) (600 mm) ]} 2
(1.6 rad/s) [(400 mm/s) (960 mm/s) ] 2(1.6 rad/s) ( 180 mm)
(640 mm/s ) (1536 mm/s ) (576 mm/s )
(640 mm/s ) (960 mm/s )
AF AD
=×× + ×
= × ×− + + ×
= × + + ×−
=−+
= −
aω ωr ωu
ω j i k ωu
j k i ji
i kk
ik
A=−+v ijk
Coriolis acceleration:
1/
2
c AF
= ×aωv
2(1.2 rad/s) [(400 mm) (780 mm/s) ]
c=×+
a ik i
/A A AF c
432 864 640 960 960
A
=−− + − −a jk ik j
222
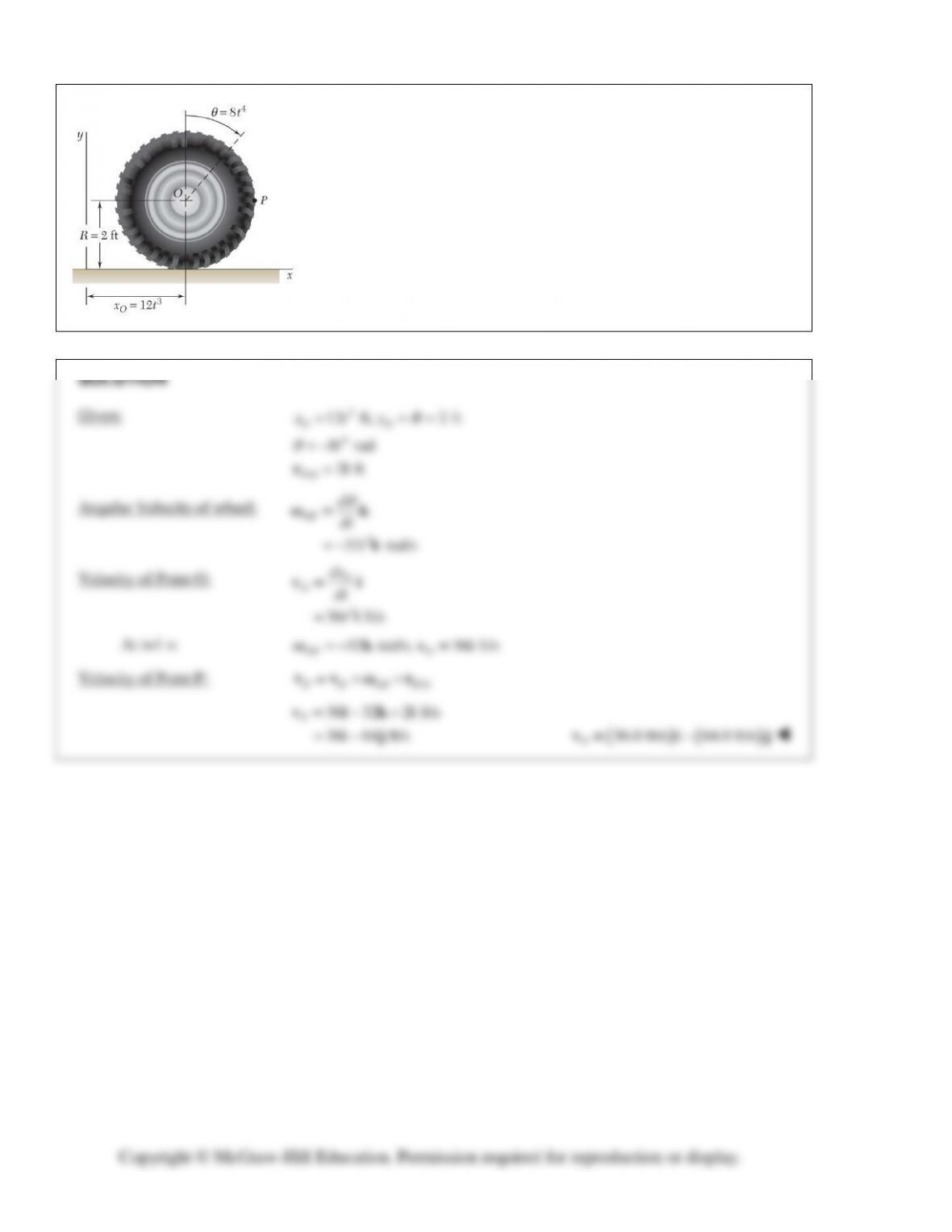
PROBLEM 15.248
A wheel moves in the xy plane in such a way that the location of its
center is given by the equations =123 and == 2, where xO
and yO are measured in feet and t is measured in seconds. The angular
displacement of a radial line measured from a vertical reference line is
= 84, where is measured in radians. Determine the velocity of the
point P located on the horizontal diameter of the wheel at t = 1 s.