
Dynamics 2e 2019
Problem 9.59
Consider a simple viscously damped harmonic oscillator governed by
Eq. (9.45), and analyze the case in which the damping coefficient
c
is negative.
Calculate the general expression for the response (without taking into account
specific initial conditions), using
mD1kg
,
cD 1Ns=m
, and
kD10 N=m
.
Comment on the system’s response.
Solution
We are told that the equation of motion for this system is given by Eq. (9.45), which is given by
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 9.60
The
MF
for a harmonically excited spring-mass-damper system at
!0=!n1
is equal to
5
. Calculate the damping ratio of the system.
What would the damping ratio be if the
MF
were equal to
10
? Sketch
the magnification factor at
!0=!n1
as a function of the damping
ratio.
Solution
The equation for the magnification factor for this system is given by Eq. (9.73) on p. 700, which is
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2021
Problem 9.61
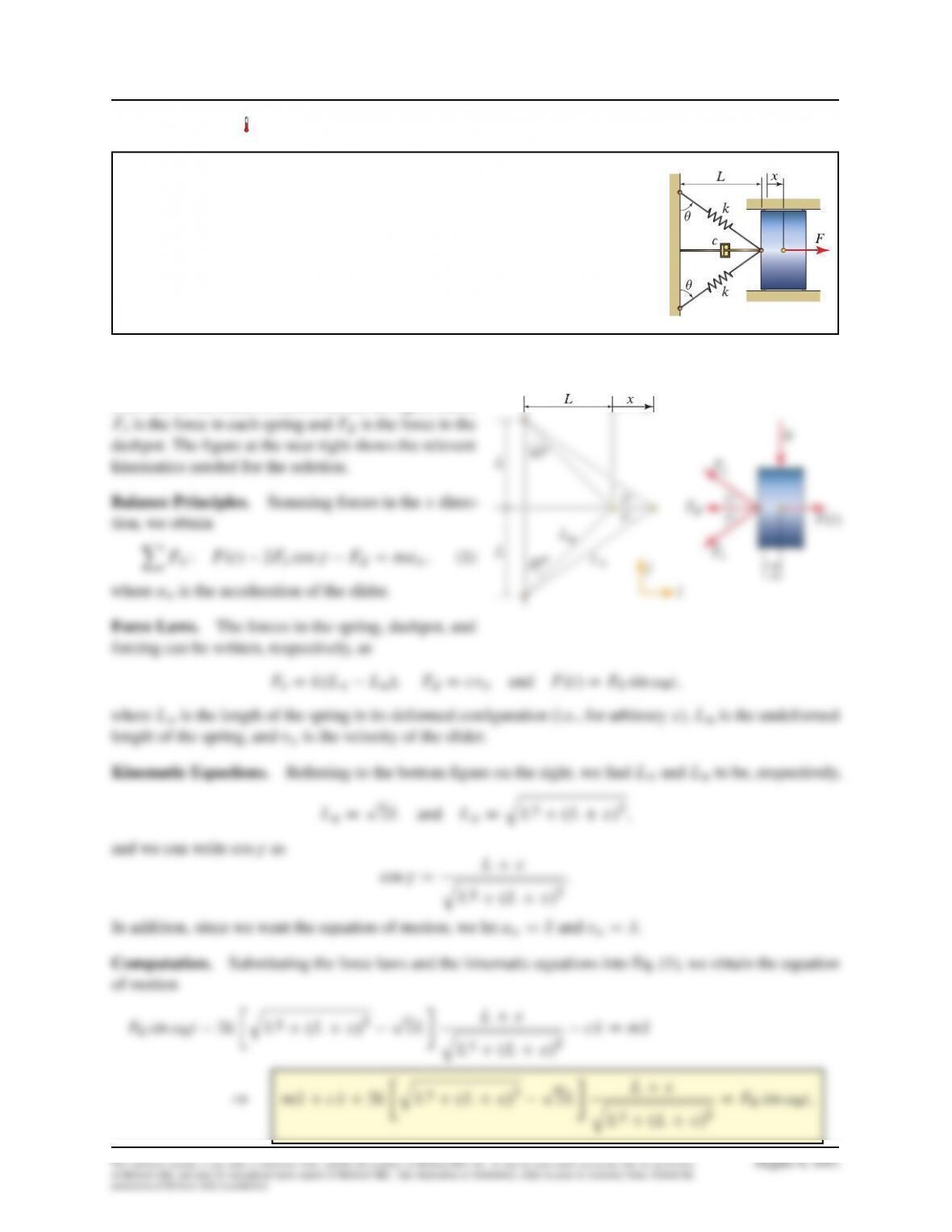
A slider moves in the horizontal plane under the action of the harmonic forcing
F .t/ DF0sin !0t
. The slider is connected to two identical linear springs, each
of which has constant
k
. When
tD0
,
x.0/ D0
, the springs are unstretched,
D45ı
, and
LDL0
. The slider is also connected to a damper with damping
coefficient
c
. Treating
F0
,
k
,
c
, and
L0
as known quantities, neglecting friction,
and letting
Px.0/ Dvi
, (a) derive the equations of motion of the system, (b) derive
the linearized equations of motion about the initial position, and (c) determine the
amplitude of the steady-state vibrations for the linearized equations of motion.
Solution
The FBD of the slider is shown on the far right, where
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

To linearize the equation of motion, we only need to linearize the term containing
k
since it is the only term
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2023
Problem 9.62
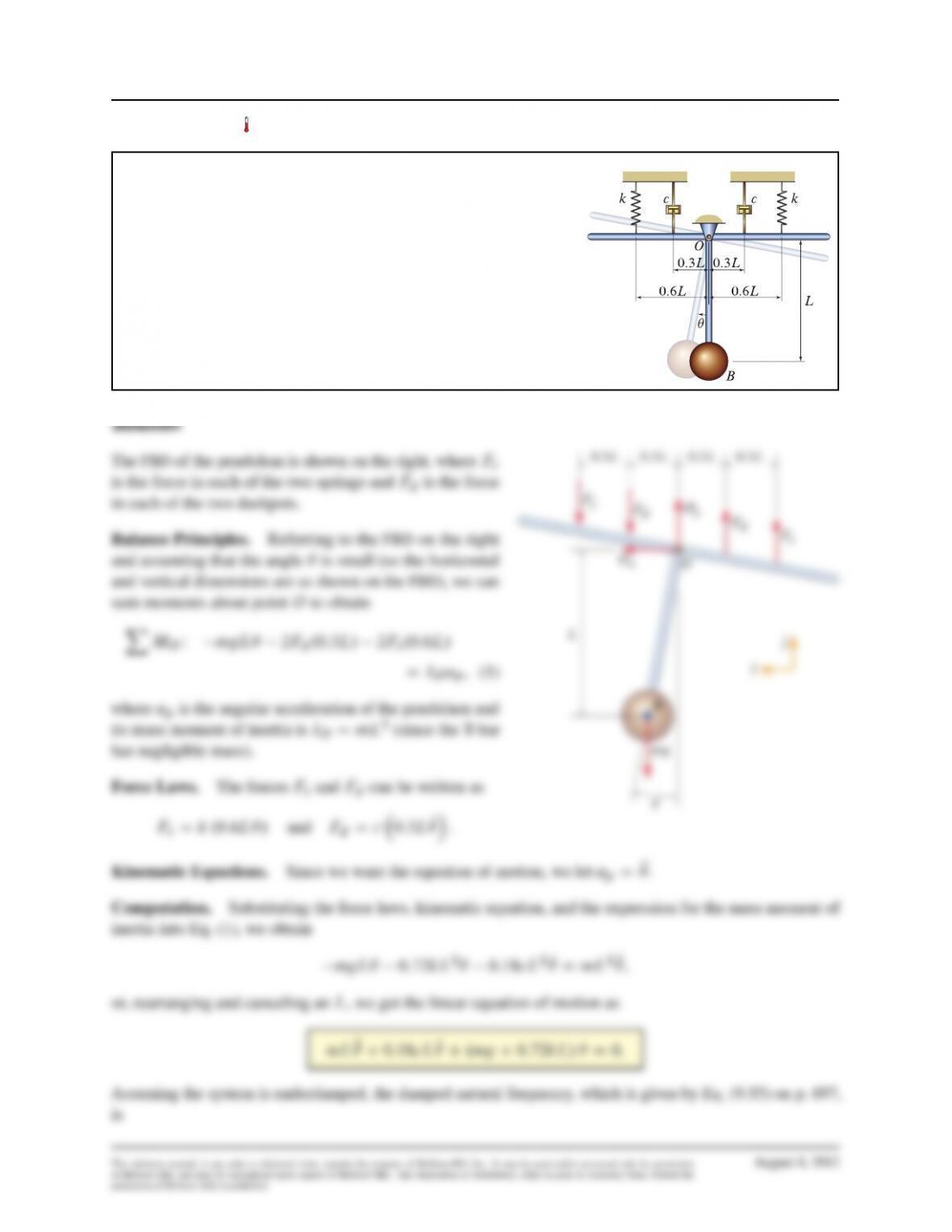
The mechanism shown is a pendulum consisting of a pendulum bob
B
with mass
m
and a T-bar, which is pinned at
O
and has negligi-
ble mass. The horizontal portion of the T-bar is connected to two
supports, each of which has an identical spring and dashpot system,
each with spring constant
k
and damping coefficient
c
. The springs
are unstretched when
B
is vertically aligned with the pin at
O
. Mod-
eling
B
as a particle, derive the linearized equations of motion of
the system. In addition, assuming that the system is underdamped,
derive the expression for the damped natural frequency of vibration
of the system.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2025
Problem 9.63
The block of mass
m
is coupled to the support
A
, which is displacing
harmonically according to
yDYsin !0t
, by the linear elastic spring
with constant kand the dashpot with constant c.
(a)
Derive its equation of motion, using
x
as the independent variable,
and explain in what way the resulting equation of motion is not in
the form of Eq. (9.65).
(b)
Next, let
´Dxy
and substitute it into the equation of motion
found in Part (a). After doing so, show that you obtain an equation
of motion in ´that is of the same form as Eq. (9.65).
(c)
Find the steady-state solution to the equation of motion found in
Part (b) and then using that, determine the steady-state solution for
x.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Part (b).
Letting ´Dxyand substituting it into the first form of the equation of motion from Part (a), we obtain
Part (c).
To determine the steady-state solution for
´
, that is to the equation of motion found in Part (b), we can either
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2027
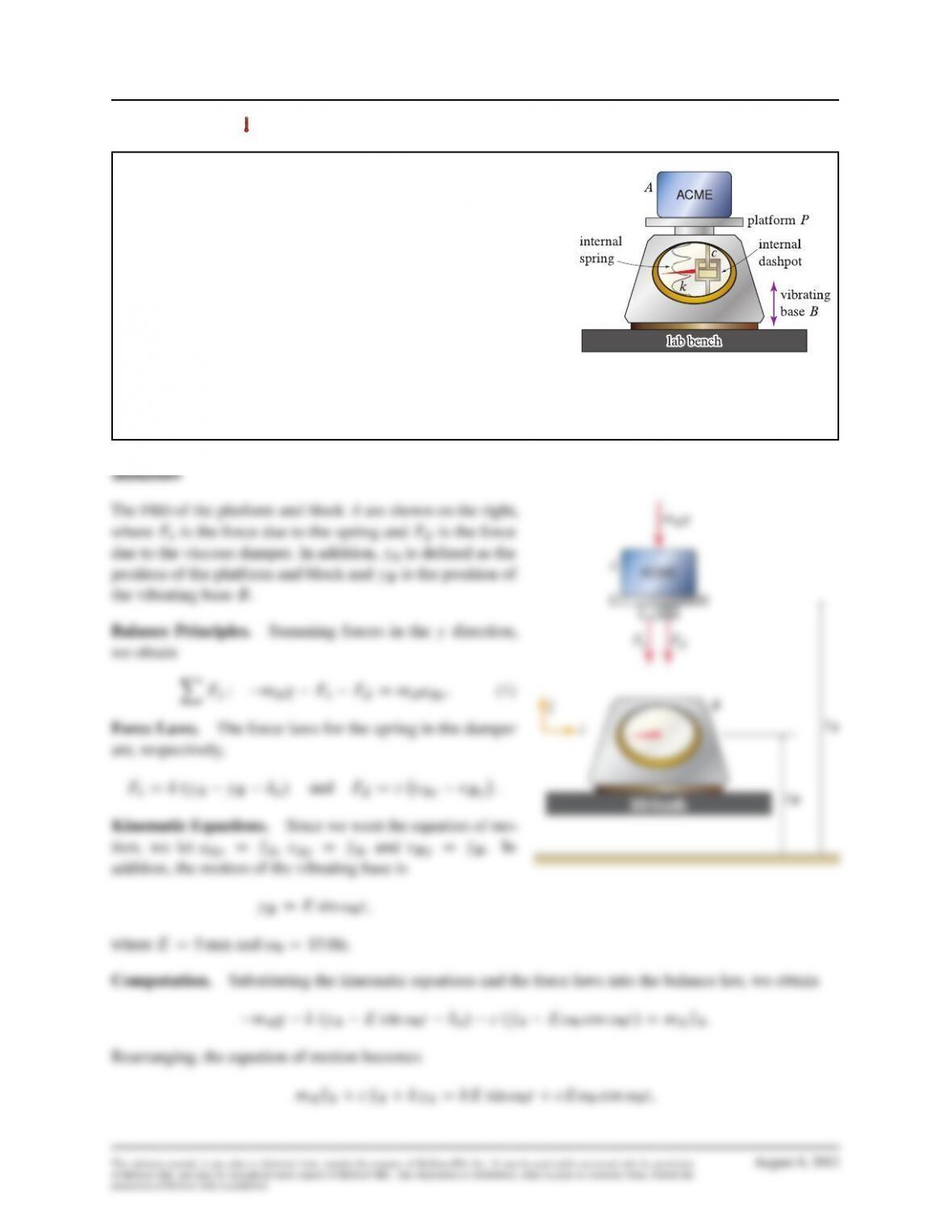
Problem 9.64
The block
A
and the platform
P
of a spring scale are at rest when
the lab bench to which the scale is rigidly attached begins vibrating
sinusoidally with a frequency of
15 Hz
and amplitude of
5mm
.
The block and the platform are coupled to the base
B
of the scale
by a linear elastic spring and a viscous damper that are internal
to the scale. The combined mass of the block and platform is
mAD1:5 kg
, the spring constant is
kD50 N=m
, and the viscous
damping coefficient is cD7:5 Ns=m.
Determine the vertical motion of the platform and block as a
function of time. The base of the scale
B
is rigidly attached to the
lab bench, and the block
A
does not separate from the platform
P
during the vibration. Hint: Parts (a)–(c) of Prob. 9.63 will be
helpful.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

where we have used the fact that
mAgDkıst
. This equation is not in the form of Eq. (9.65) on p. 699
since the forcing term on the right hand side is of the form
Rcos !0tCSsin !0t
and not just
Rcos !0t
or
where we have used
mAD1:5 kg
,
kD50 N=m
, and
cD7:5 Ns=m
to obtain the numerical result. Since
< 1, the system is underdamped and the complementary solution is given by
Dm!2
0Esin !0t:
Since this expression must be true for all time, we can equate the coefficients of
sin !0t
and
cos !0t
to obtain
c!0
0E)DDmA!2
02ıc!0Cc!0DmAc!3
02Cc2!2
0
Since the system is linear, it turns out that it is actually easy to solve as the superposition of a particular solution for
Rcos !0t
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.