1848 Solutions Manual
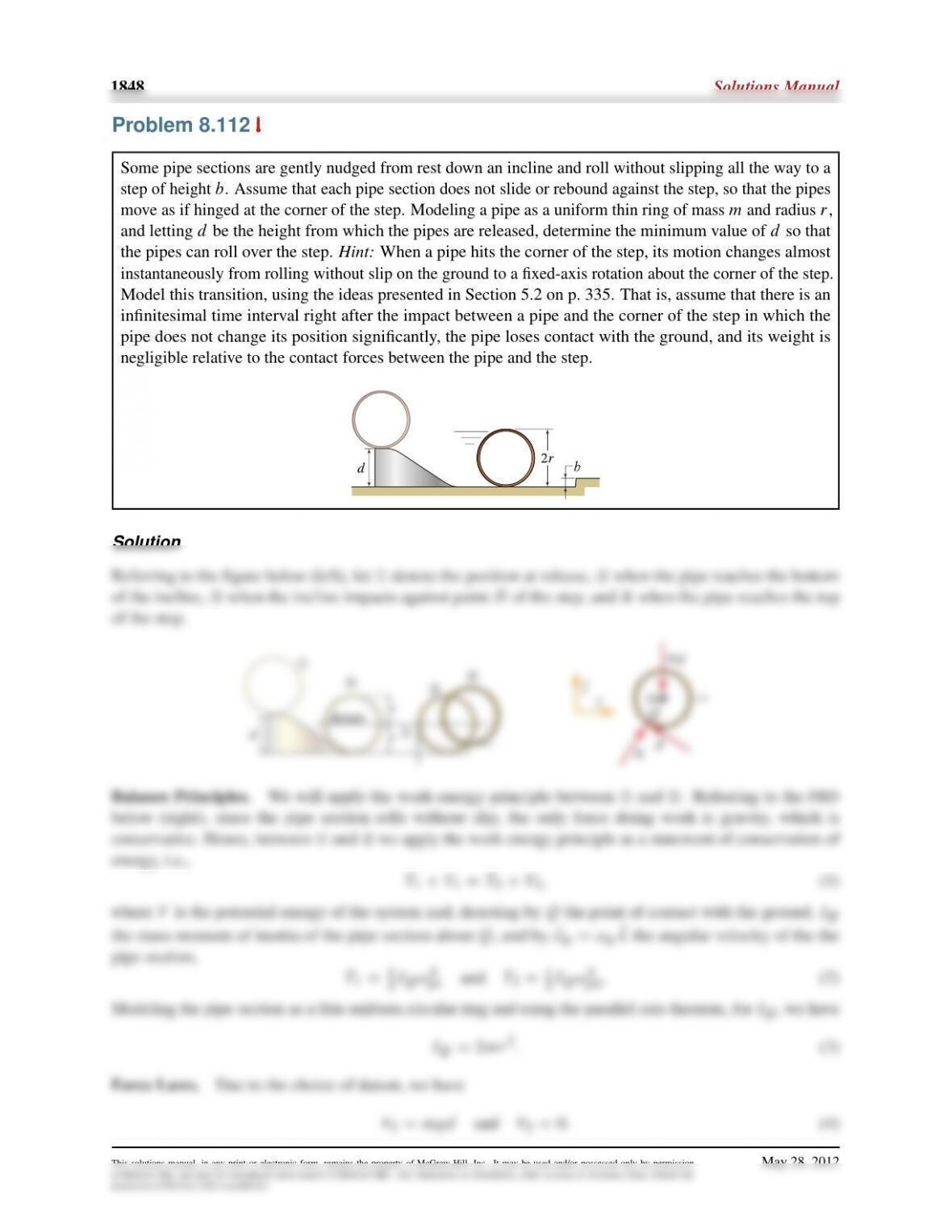
Some pipe sections are gently nudged from rest down an incline and roll without slipping all the way to a
step of height
b
. Assume that each pipe section does not slide or rebound against the step, so that the pipes
move as if hinged at the corner of the step. Modeling a pipe as a uniform thin ring of mass
m
and radius
r
,
and letting
d
be the height from which the pipes are released, determine the minimum value of
d
so that
the pipes can roll over the step. Hint: When a pipe hits the corner of the step, its motion changes almost
instantaneously from rolling without slip on the ground to a fixed-axis rotation about the corner of the step.
Model this transition, using the ideas presented in Section 5.2 on p. 335. That is, assume that there is an
infinitesimal time interval right after the impact between a pipe and the corner of the step in which the
pipe does not change its position significantly, the pipe loses contact with the ground, and its weight is
negligible relative to the contact forces between the pipe and the step.
Solution
Referring to the figure below (left), let
¿
denote the position at release,
¡
when the pipe reaches the bottom

Dynamics 2e 1849
Kinematic Equations. The pipe section is released from rest, so
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 8.113
A crane has a boom
A
of mass
mA
and length
`
that can rotate in the horizontal plane about a fixed point
O
. A trolley
B
of mass
mB
is mounted on one side of
A
, such that the mass center of
B
is always at a
distance
e
from the longitudinal axis of
A
. The position of
B
is controlled by a cable and a system of
pulleys. Both
A
and
B
are initially at rest in the position shown, where
d
is the initial distance of
B
from
O
measured along the longitudinal axis of
A
. The boom
A
is free to rotate about
O
and, for a short time
interval
0tt
f
,
B
moves with constant acceleration
a0
without reaching the end of
A
. Letting
IO
be
the mass moment of inertia of
A
, modeling
B
as a particle, and accounting only for the inertia of
A
and
B
,
determine the direction of rotation of
A
and the angle
✓
swept by
A
from
tD0
to
tDt
f
. Neglect the
mass of the cable and of the pulleys.
where
E
hO
is the angular momentum of the system about
O
. We denote the angular velocity of the boom by
E!AD!AO
k, the position of Brelative to Oby ErB, and the velocity of Bby EvB. Then, E
hOis given by
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1851
constant acceleration a0relative to the boom. So, using constant acceleration equations, for 0tt
f, we
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
1852 Solutions Manual
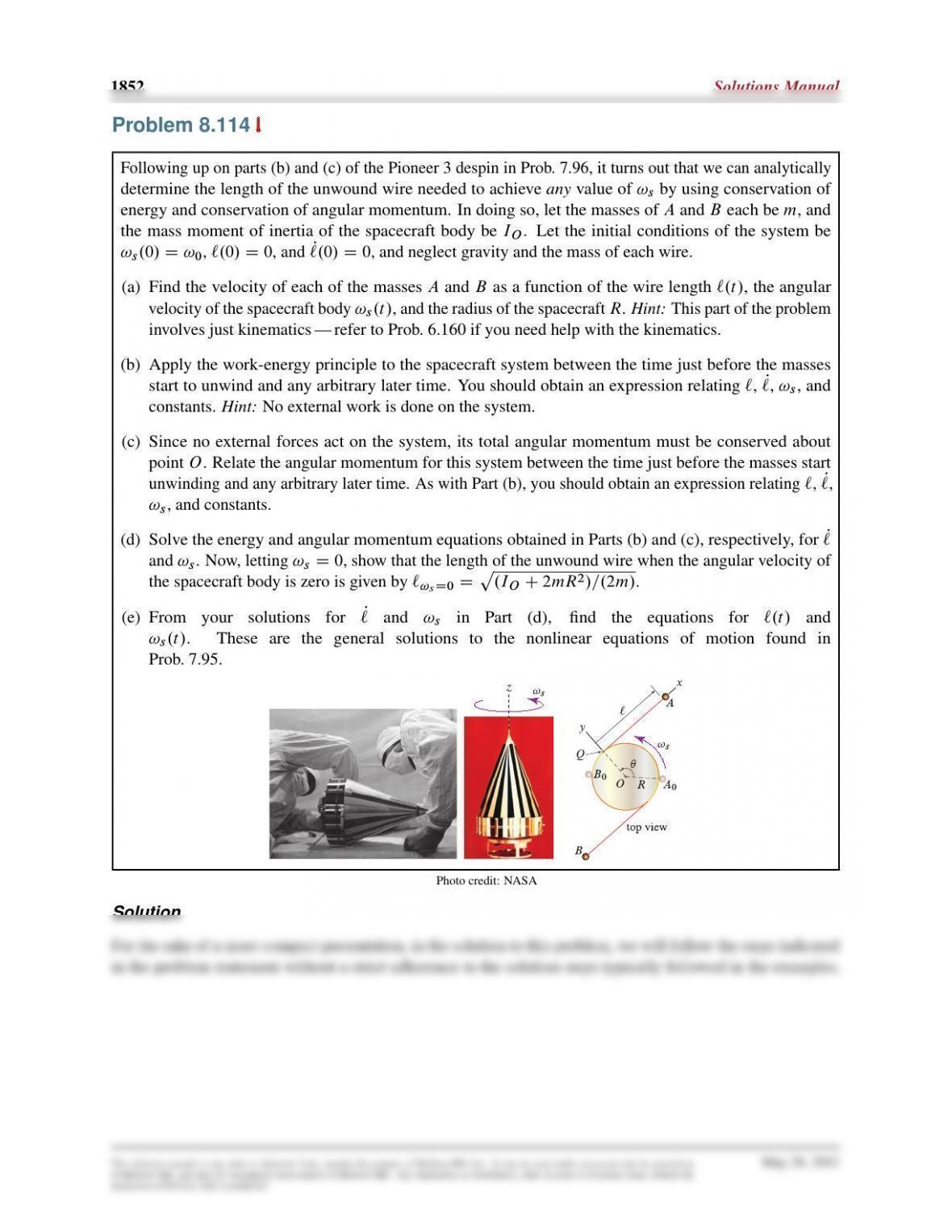
Following up on parts (b) and (c) of the Pioneer 3 despin in Prob. 7.96, it turns out that we can analytically
determine the length of the unwound wire needed to achieve any value of
!s
by using conservation of
energy and conservation of angular momentum. In doing so, let the masses of
A
and
B
each be
m
, and
the mass moment of inertia of the spacecraft body be
IO
. Let the initial conditions of the system be
!s.0/ D!0,`.0/ D0, and P
`.0/ D0, and neglect gravity and the mass of each wire.
(a)
Find the velocity of each of the masses
A
and
B
as a function of the wire length
`.t/
, the angular
velocity of the spacecraft body
!s.t/
, and the radius of the spacecraft
R
.Hint: This part of the problem
involves just kinematics — refer to Prob. 6.160 if you need help with the kinematics.
(b)
Apply the work-energy principle to the spacecraft system between the time just before the masses
start to unwind and any arbitrary later time. You should obtain an expression relating
`
,
P
`
,
!s
, and
constants. Hint: No external work is done on the system.
(c)
Since no external forces act on the system, its total angular momentum must be conserved about
point
O
. Relate the angular momentum for this system between the time just before the masses start
unwinding and any arbitrary later time. As with Part (b), you should obtain an expression relating
`
,
P
`
,
!s, and constants.
(d)
Solve the energy and angular momentum equations obtained in Parts (b) and (c), respectively, for
P
`
and
!s
. Now, letting
!sD0
, show that the length of the unwound wire when the angular velocity of
the spacecraft body is zero is given by `!sD0Dp.IOC2mR2/=.2m/.
(e)
From your solutions for
P
`
and
!s
in Part (d), find the equations for
`.t/
and
!s.t/
. These are the general solutions to the nonlinear equations of motion found in
Prob. 7.95.
Photo credit: NASA
Solution
For the sake of a more compact presentation, in the solution to this problem, we will follow the steps indicated

Dynamics 2e 1853
Part (a).
We attach a rotating
xy´
reference frame such that the
x
axis is always
aligned with the wire attached to
A
and such that the origin of the frame always
coincides with the point on the wire that is about to unwind (see point
Q
in the figure
¿
¡
position corresponding to the cords having unwound an amount `.
The FBD shown on the right indicates that there are no external forces acting on
the system, i.e., the system is isolated. Consequently, no work is being done on the

Part (c).
We define the time instants
1
and
2
to be the instants in time corresponding to the positions
1
and
Part (d).
Equation (8) and (13) form a system of two equations in the two unknowns
P
`
and
!s
whose
Part (e).
The solution for
P
`
Eq. (14) shows that
P
`
is a constant. Hence, integrating
P
`
with respect to time
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1855
Problem 8.115
Astop shot is a pool shot in which the cue ball (white) stops upon
striking the object ball (aqua). Modeling the collision between the two
balls as a perfectly elastic collision of two rigid bodies with frictionless
contact, determine which condition must be true for the preimpact an-
gular velocity of the cue ball in order to properly execute a stop shot:
(a) !0<0; (b) !0D0; (c) !0>0.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 8.116
The cue ball (white) is rolling without slip to the left, and its center is moving
with a speed
v0D6ft=s
while the object ball (aqua) is stationary. The
diameter
d
of the two balls is the same and is equal to
2:25 in:
The coefficient
of restitution of the impact is
eD0:98
. Let
WcD6oz
and
WoD5:5 oz
be
the weights of the cue ball and object ball, respectively. Let
P
and
Q
be the
points on the cue ball and on the object ball, respectively, that are in contact
with the table at the time of impact. Assuming that the contact between the
two balls is frictionless and modeling the balls as uniform spheres, determine
the postimpact velocities of Pand Q.
d;!
where the third of Eqs. (5) expresses the fact that the cue ball is rolling without slip before impact.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1857
Computation.
Substituting the last two of Eqs. (5) into Eqs. (2) and (3) we obtain the postimpact angular
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.