
Force Laws. The spring force can be expressed as
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1647
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 7.117
A wheel with center
O
, radius
R
, weight
W
, radius of gyration
kG
, and center
of mass
G
at a distance
from
O
is released from rest on a rough incline. The
angle
is the angle between the segment
OG
(which rotates with the wheel)
and the horizontal.
Let
RD1:5 ft
,
D0:8 ft
,
kGD0:6 ft
,
WD4lb
, and
D25ı
. In
addition, let
D35ı
at the instant of release. Determine the minimum
coefficient of static friction so that the wheel starts moving while rolling without
slip. In addition, determine the corresponding angular acceleration right after
release.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1649
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 7.118
A wheel with center
O
, radius
R
, weight
W
, radius of gyration
kG
, and center
of mass
G
at a distance
from
O
is released from rest on a rough incline. The
angle
is the angle between the segment
OG
(which rotates with the wheel)
and the horizontal.
Assuming that there is enough friction for the wheel to roll without slip,
determine the equation(s) of motion of the wheel, as well as the constraint force
equations, that is, those equations that would allow you to compute the reaction
forces at the contact point with the incline if the motion were known.
gk2
Force Laws. To determine the minimum coefficient of static friction so that the wheel rolls without slip
Kinematic Equations.
Since the wheel rolls without slipping over the incline, the acceleration of
O
is
given by
EaOD R˛wO{:
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1651
FŒRCsin ./ N cos ./DW
gk2
GR
;
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 7.119
A wheel with center
O
, radius
R
, weight
W
, radius of gyration
kG
, and center
of mass
G
at a distance
from
O
is released from rest on a rough incline. The
angle
is the angle between the segment
OG
(which rotates with the wheel)
and the horizontal.
Let
RD1:5 ft
,
D0:8 ft
,
kGD0:6 ft
,
WD4lb
, and
D25ı
, and let
D60ı
at the instant of release. Assuming that there is sufficient friction for
the wheel to roll without slip and that the incline is sufficiently long that we
need not worry about the wheel reaching the end of the incline, determine the
equation(s) of motion of the wheel and expressions for the friction and normal
forces at the point of contact between the wheel and the incline. Then, integrate
the equation(s) of motion as a function of time for
0t2
s. Plot the normal
force as a function of time over the given time interval and determine if and
when the wheel loses contact with the incline.
gk2
Force Laws. To determine the minimum coefficient of static friction so that the wheel rolls without slip
Kinematic Equations.
Since the wheel rolls without slipping over the incline, the acceleration of
O
is
given by
EaOD R˛wO{:
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1653
Computation.
Substituting the expression of the mass moment of inertia and the kinematic equations into
the Newton-Euler equations, we obtain the following three equations in the three unknowns F,N, and R
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
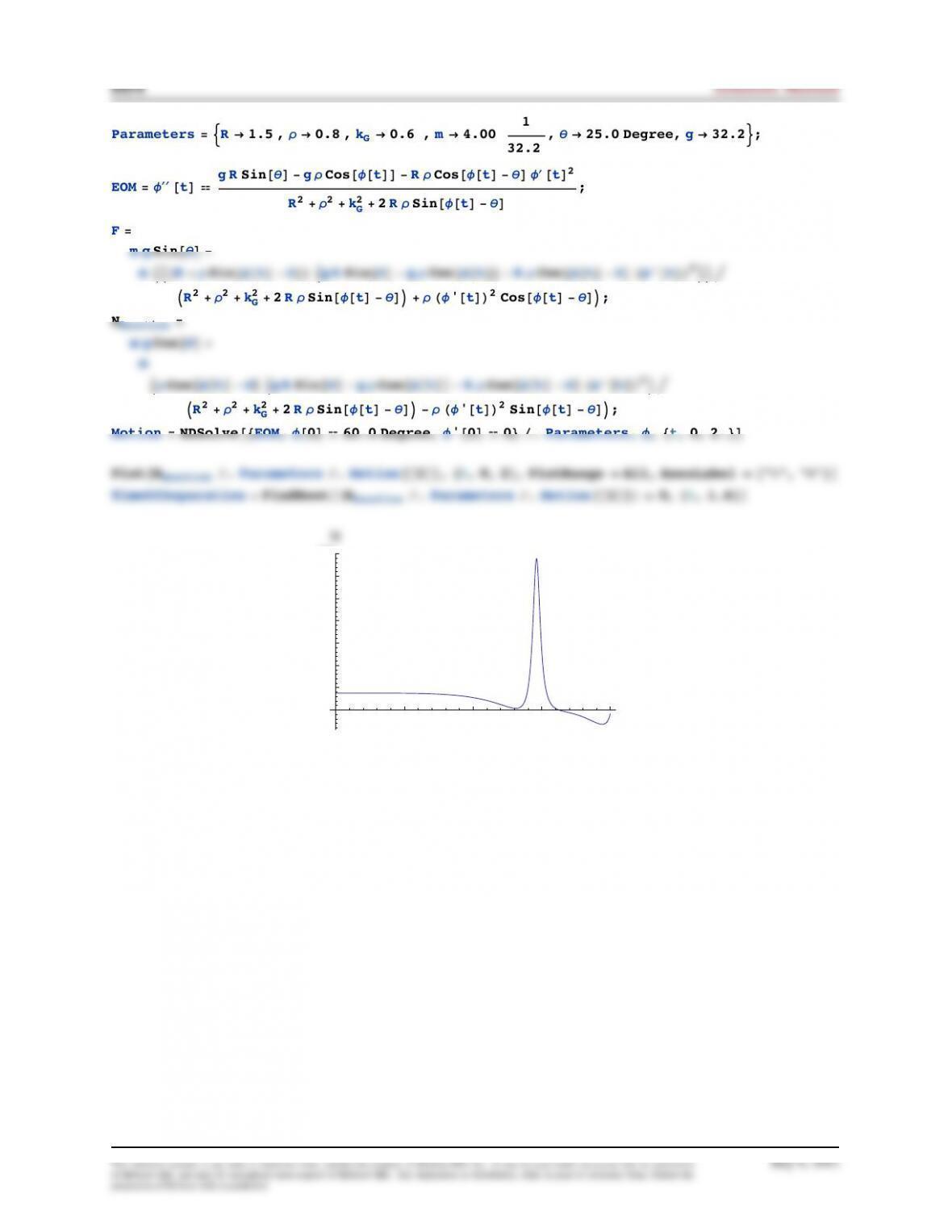
Parameters !!R“1.5 , Ρ“0.8 , kG“0.6 , m“4.00 1
32.2
,Θ“25.0 Degree, g“32.2“;
EOM !Φ&& #t$‘
g R Sin#Θ$(gΡCos#Φ#t$$(RΡCos#Φ#t$(Θ$Φ&#t$2
R2)Ρ2)kG
2)2RΡSin#Φ#t$(Θ$;
F!
m g Sin#Θ$(
m%%&R)ΡSin#Φ#t$(Θ$‘%g R Sin#Θ$(gΡCos#Φ#t$$(RΡCos#Φ#t$(Θ$&Φ‘#t$‘2(()
%R2)Ρ2)kG
2)2RΡSin#Φ#t$(Θ$()Ρ&Φ‘#t$‘2Cos#Φ#t$(Θ$(;
NReaction !
m g Cos#Θ$)
m
%ΡCos#Φ#t$(Θ$%g R Sin#Θ$(gΡCos#Φ#t$$(RΡCos#Φ#t$(Θ$&Φ‘#t$‘2()
%R2)Ρ2)kG
2)2RΡSin#Φ#t$(Θ$((Ρ&Φ‘#t$‘2Sin#Φ#t$(Θ$(;
Motion !NDSolve#*EOM,Φ#0$‘60.0 Degree, Φ‘#0$‘0+ ,.Parameters,Φ,*t, 0, 2.+$
Plot#NReaction ,.Parameters ,.Motion##1$$,*t, 0, 2+, PlotRange “All, AxesLabel “*“t“, “N“+$
TimeOfSeparation !FindRoot#&NReaction ,.Parameters ,.Motion##1$$‘ ‘0, *t, 1.6+$
0.5
1.0
1.5
2.0
t
5
10
15
20
25
30
35
N
Dynamics 2e 1655
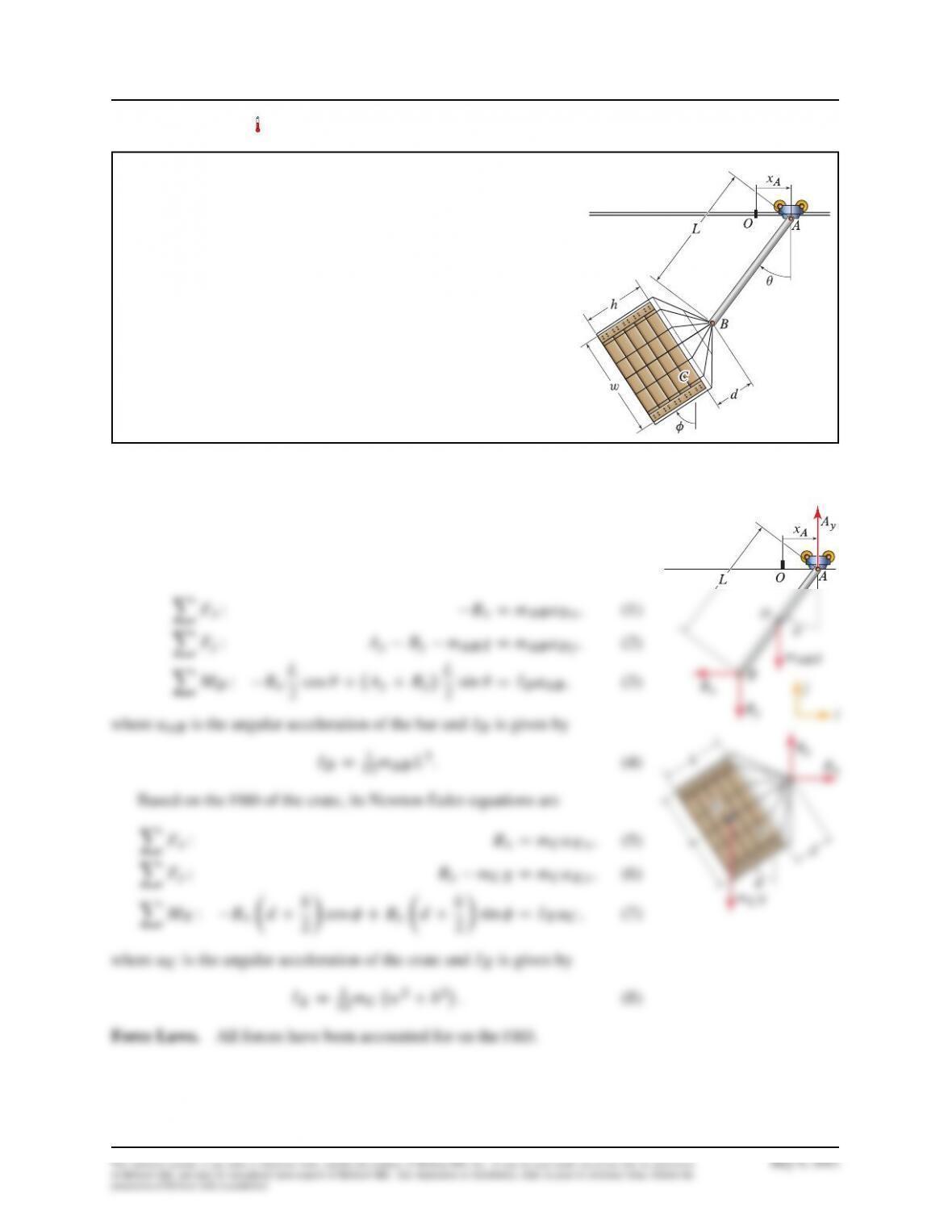
Problem 7.120
The uniform slender bar
AB
has mass
mAB
and length
L
. The
crate has a uniformly distributed mass
mC
and dimensions
h
and
w
. Bar
AB
is pin-connected to the trolley at
A
and to the crate at
B
. The trolley is constrained to move along the horizontal guide
shown. Point
O
on the trolley’s guide is a fixed reference point.
Neglect the mass of the trolley and friction.
Derive the equations of motion of the system and express them
in terms of the variables
xA
,
, and
along with their time deriva-
tives.
Solution
The FBDs of the arm and crate are shown on the right.
Balance Principles.
Based on the FBD of the bar, its Newton-Euler equations
are
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.