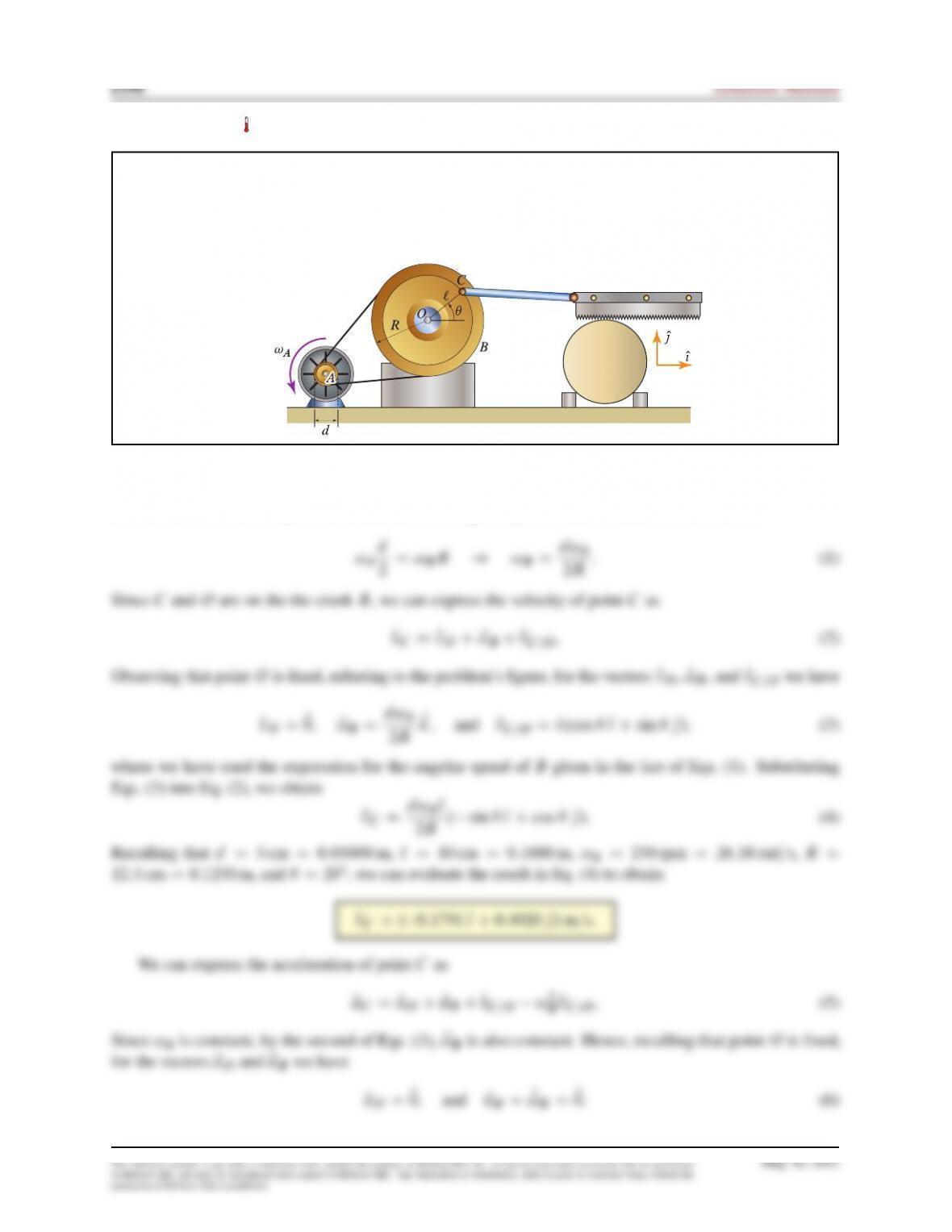
Problem 6.28
The wheel
A
, with diameter
dD5cm
, is mounted on the shaft of the motor shown and is rotating with
a constant angular speed
!AD250 rpm
. The wheel
B
, with center at the fixed point
O
, is connected to
A
with a belt, which does not slip relative to
A
or
B
. The radius of
B
is
RD12:5 cm
. At point
C
the
wheel
B
is connected to a saw. If point
C
is at distance
`D10 cm
from
O
, determine the velocity and
acceleration of Cwhen D20ı. Express your answers using the component system shown.
Solution
Since the belt does not slip relative to Aor B, the angular speeds of Aand Bmust be such that
d
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1191
Substituting Eqs. (6) into Eq. (5), and using the second of Eqs. (1) as well as the last of Eqs. (3), we obtain
A
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
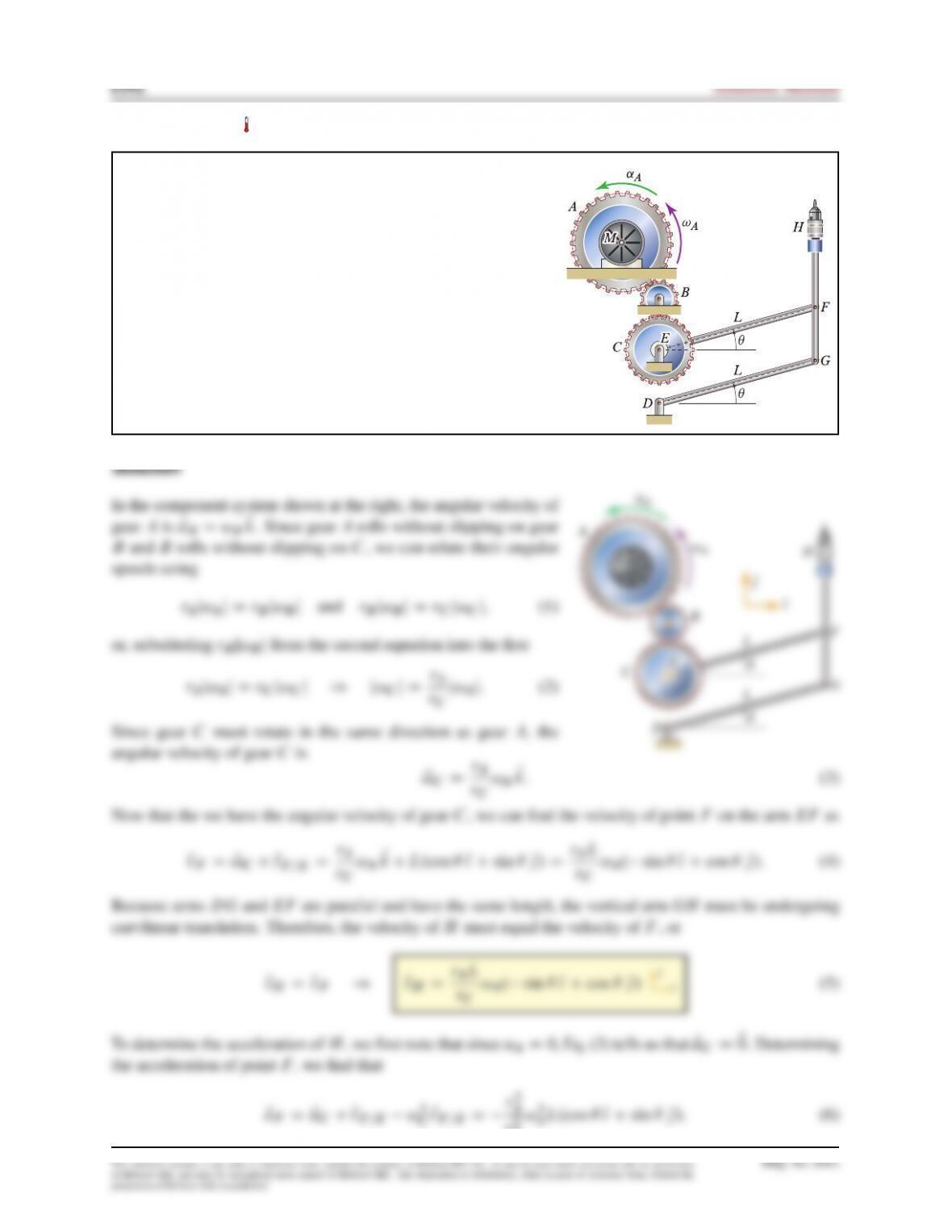
Problem 6.29
The mechanism shown is designed to move the tool at
H
while
keeping it oriented vertically. To do so, the rotor in the motor
M
is attached to the gear
A
, which drives the gear
B
. In turn,
gear
B
drives the gear
C
, which is rigidly attached to the arm
EF
. Arms
EF
and
DG
both have length
L
and are parallel to
one another. The radii of gears
A
,
B
, and
C
are
rA
,
rB
, and
rC
,
respectively.
If the motor
A
rotates with a constant angular speed
!A
(i.e.,
˛AD0
) in the direction shown, determine the velocity and
acceleration of the tool Has functions of the angle .
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1193
where we have used Eq. (3). Because the vertical arm is in curvilinear translation, all points on it must have
the same acceleration, which means that EaHD EaF, or
A
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
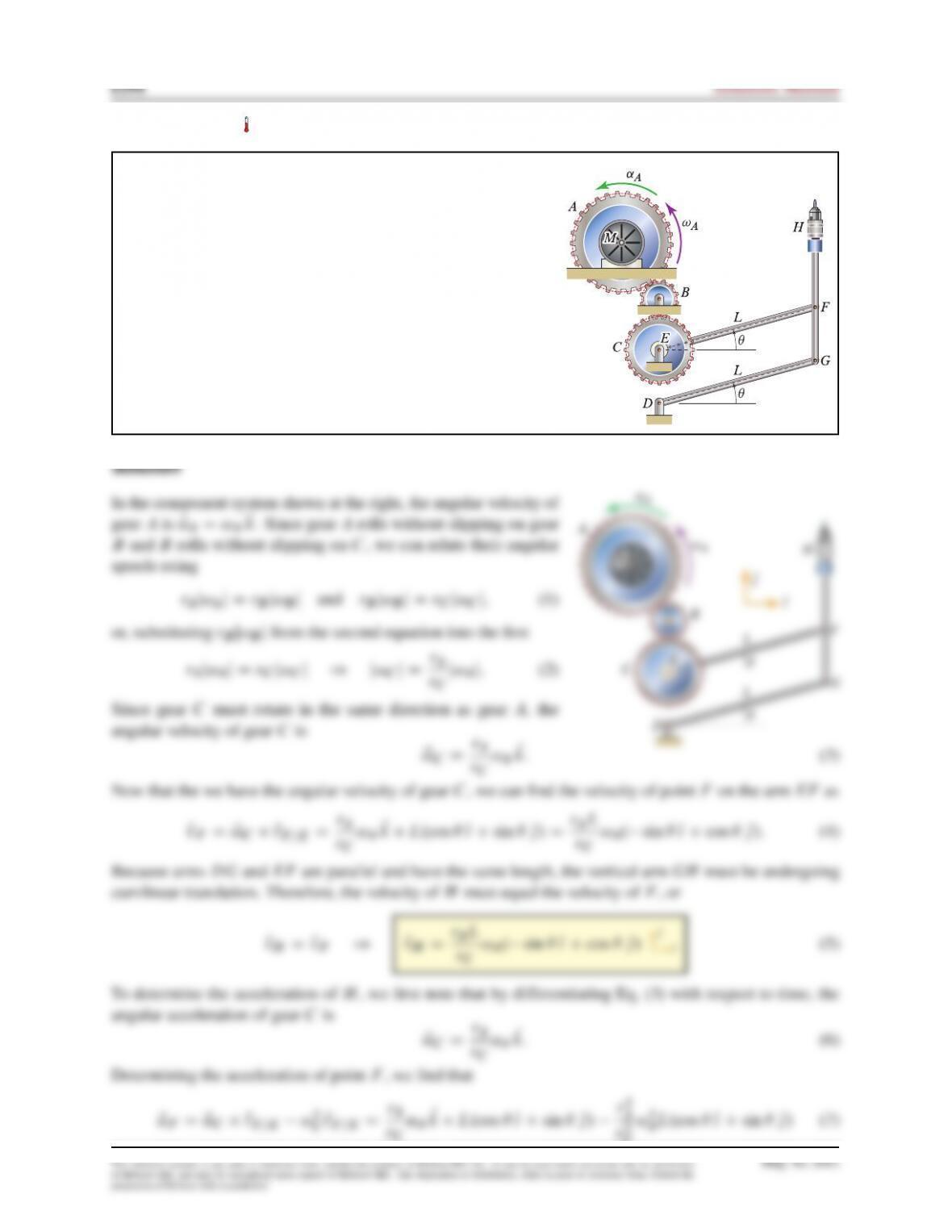
Problem 6.30
The mechanism shown is designed to move the tool at
H
while
keeping it oriented vertically. To do so, the rotor in the motor
M
is attached to the gear
A
, which drives the gear
B
. In turn,
gear
B
drives the gear
C
, which is rigidly attached to the arm
EF
. Arms
EF
and
DG
both have length
L
and are parallel to
one another. The radii of gears
A
,
B
, and
C
are
rA
,
rB
, and
rC
,
respectively.
If the motor
A
rotates with angular speed
!A
and angular
acceleration in the directions shown, determine the velocity and
acceleration of the tool Has functions of the angle .
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1195
A
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
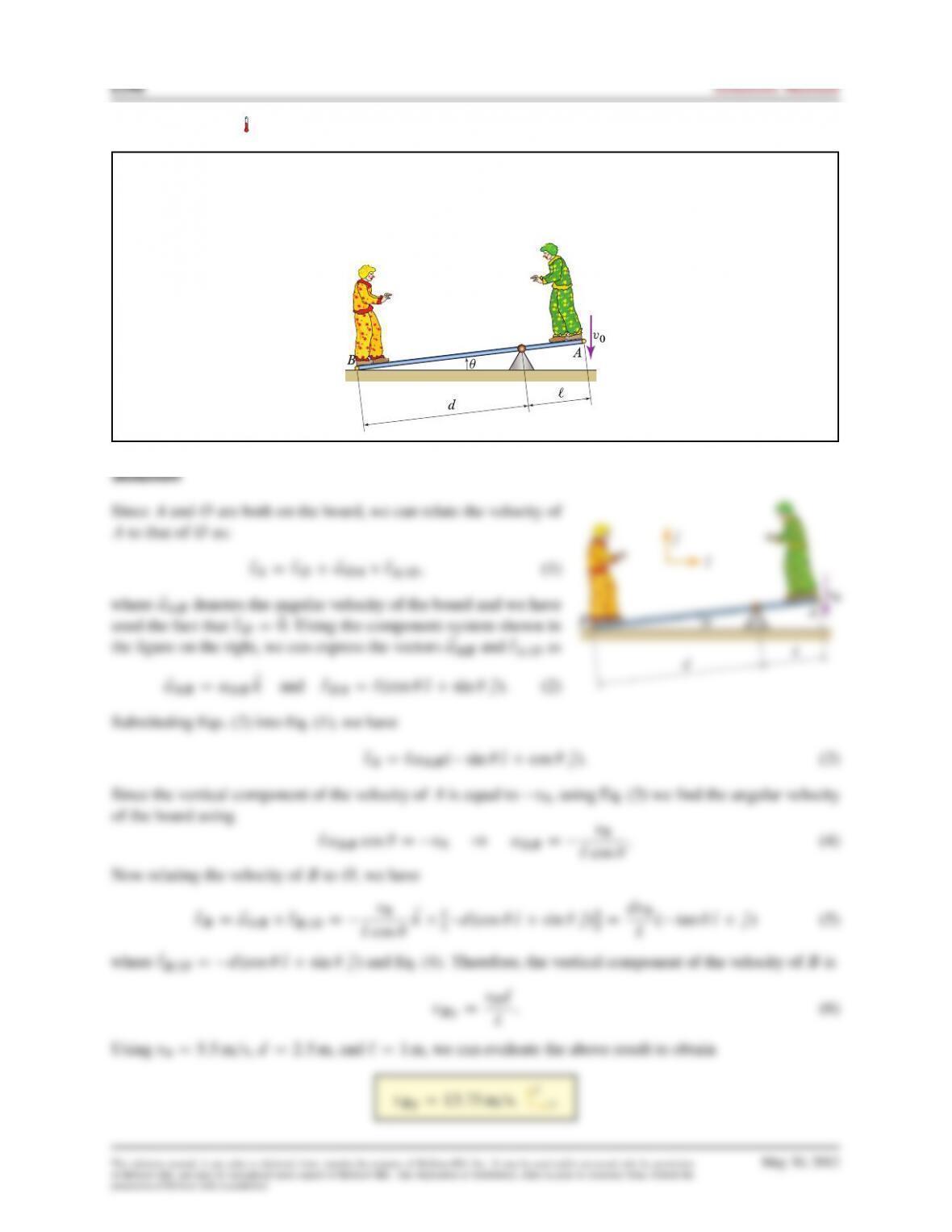
Problem 6.31
An acrobat lands at the end
A
of a board and, at the instant shown, point
A
has a downward vertical
component of velocity
v0D5:5 m=s
. Letting
D15ı
,
`D1
m, and
dD2:5
m, determine the vertical
component of velocity of point Bat this instant if the board is modeled as a rigid body.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1197
Problem 6.32
Ageosynchronous equatorial orbit is a circular orbit above the Earth’s
equator that has a period of
1
day (these are sometimes called geostationary
orbits). These geostationary orbits are of great importance for telecommu-
nications satellites because a satellite orbiting with the same angular rate
as the rotation rate of the Earth will appear to hover in the same point in
the sky as seen by a person standing on the surface of the Earth. Using
this information, modeling a geosynchronous satellite as a rigid body, and
noting that the satellite has been stabilized so that the same side always
faces the Earth, determine the angular speed !sof the satellite.
Solution
The motion of the satellite is a fixed-axis rotation about the center of the Earth where the axis is perpendicular
to the plane of the satellite’s orbit. For the satellite to be geosynchronous, the satellite’s angular velocity must
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 6.33
Wheels
A
and
C
are mounted on the same shaft and rotate together. Wheels
A
and
B
are connected by a belt, and so are wheels
C
and
D
. The axes
of rotation of all the wheels are fixed, and the belts do not slip relative
to the wheels they connect. If, at the instant shown, wheel
A
has an
angular velocity
!AD2rad=s
and an angular acceleration
˛AD0:5 rad=s2
,
determine the angular velocity and acceleration of wheels
B
and
D
. The
radii of the wheels are
RAD1ft
,
RBD0:25 ft
,
RCD0:6 ft
, and
RDD
0:75 ft.
RDD0:75 ft.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1199
Problem 6.34
At the instant shown,
A
is moving upward with a speed
v0D5ft=s
and acceleration
a0D0:65 ft=s2
. Assuming that the rope that connects the pulleys does not slip relative to
the pulleys, and letting
`D6in:
and
dD4in:
, determine the angular velocity and angular
acceleration of pulley C.
Solution
First doing the pulley kinematics, we can define the rope length using the
coordinates shown on the right as
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.