Unlock document.
This document is partially blurred.
Unlock all pages and 1 million more documents.
Get Access

Solving these two equations gives
Position 2.
Referring to the figure at the right, the
X Y Z
frame is
fixed and the rotating
xy´
reference frame is attached to the slotted
arm
CD
. Both frames have their origin at
C
. For the position of
interest,
O{DO
I
,
O|DO
J
, and
O
kDO
K
. Relating the velocity of point
B
to that of A, which is fixed, we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1381
Part (a) For !AB D120 rpm D120
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 6.156
The wheel
D
rotates with a constant angular velocity
!DD14 rad=s
about
the fixed point
O
, which is assumed to be stationary relative to an inertial
frame of reference. The
xy´
frame rotates with the wheel. Collar
C
slides
along the bar
AB
with a constant velocity
vCD4ft=s
relative to the
xy´
frame. Letting
`D0:25 ft
, determine the inertial velocity and acceleration
of Cwhen D25ı. Express the result with respect to the xy´ frame.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1383
Problem 6.157
The wheel
D
rotates without slipping over a flat surface. The
X Y Z
frame shown is inertial, whereas the
xy´
frame is attached to
D
at
O
and rotates with it at a constant angular velocity
!DD14 rad=s
.
Collar
C
slides along the bar
AB
with a constant velocity
vCD4ft=s
relative to the
xy´
frame. Letting
`D0:25 ft
and
RD1ft
, determine
the inertial velocity and acceleration of
C
when
D25ı
and the
xy´
frame is parallel to the
X Y Z
frame as shown. Express your result in
both the xy´ and X Y Z frames.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

where we have used the facts that
vC
and
!D
are constant in computing
EaCrel
and
P
E
˝
, respectively. Substituting
Eqs. (3)–(5) and (7)–(9) into Eq. (6), we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 1385
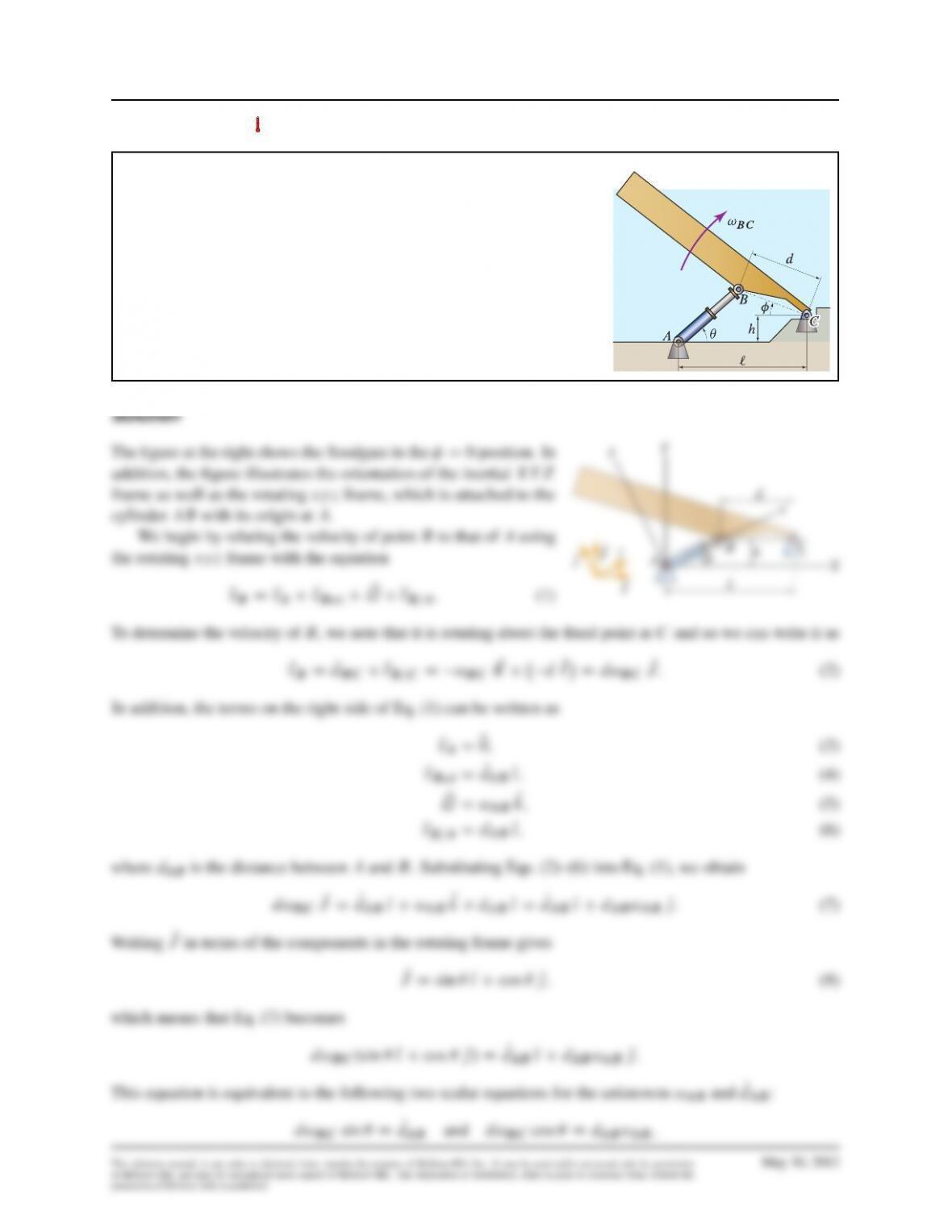
Problem 6.158
A floodgate is controlled by the motion of the hydraulic cylinder
AB
.
If the gate
BC
is to be lifted with a constant angular velocity
!BC D
0:5 rad=s
, determine
P
dAB
and
R
dAB
, where
dAB
is the distance between
points Aand Bwhen D0. Let `D10 ft, hD2:5 ft, and dD5ft.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

which can be solved to obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 1387
Problem 6.159
The wheel
D
rotates without slipping over a flat surface. The
X Y Z
frame shown is inertial, whereas the
xy´
frame is attached to
D
and
rotates with it at a constant angular velocity
!D
. Collar
C
slides along
the bar
AB
with a velocity
vC
relative to the
xy´
frame. Suppose
that
`
,
, and
R
are given and that we want to determine the inertial
acceleration of
C
when the
xy´
frame is parallel to the
X Y Z
frame
as shown. Would the expression of the inertial acceleration of the
collar in the two frames be different or the same?
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Problem 6.160
The Pioneer 3 spacecraft was a spin-stabilized spacecraft launched
on December 6, 1958, by the U.S. Army Ballistic Missile agency
in conjunction with NASA. It was designed with a despin mech-
anism consisting of two equal masses
A
and
B
that could be
spooled out to the end of two wires of variable length
`.t/
when
triggered by a hydraulic timer. As a prelude to Probs. 7.95, 7.96,
and 8.114, we will find the velocity and acceleration of each of
the two masses. To do this, assume that masses
A
and
B
are
initially at positions
A0
and
B0
, respectively. After the masses are
released, they begin to unwind symmetrically, and the length of
the cord attaching each mass to the spacecraft of radius
R
is
`.t/
.
Given that the angular velocity of the spacecraft at each instant is
!s.t/
, determine the velocity and acceleration of mass
A
in com-
ponents expressed in the rotating reference frame whose origin is
at
Q
, as well as
R
,
`.t/
, and
!s.t/
. Note that the rotating frame is
always aligned with the unwinding cord, and
Q
is the point on the
cord that is about to unwind at time
t
.Hint: The point
Q
moves
around the periphery of the spacecraft with angular speed
P
and
angular acceleration R
. It is not fixed to the spacecraft.
Photo credit: NASA
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.








