330 Solutions Manual
Problem 2.252
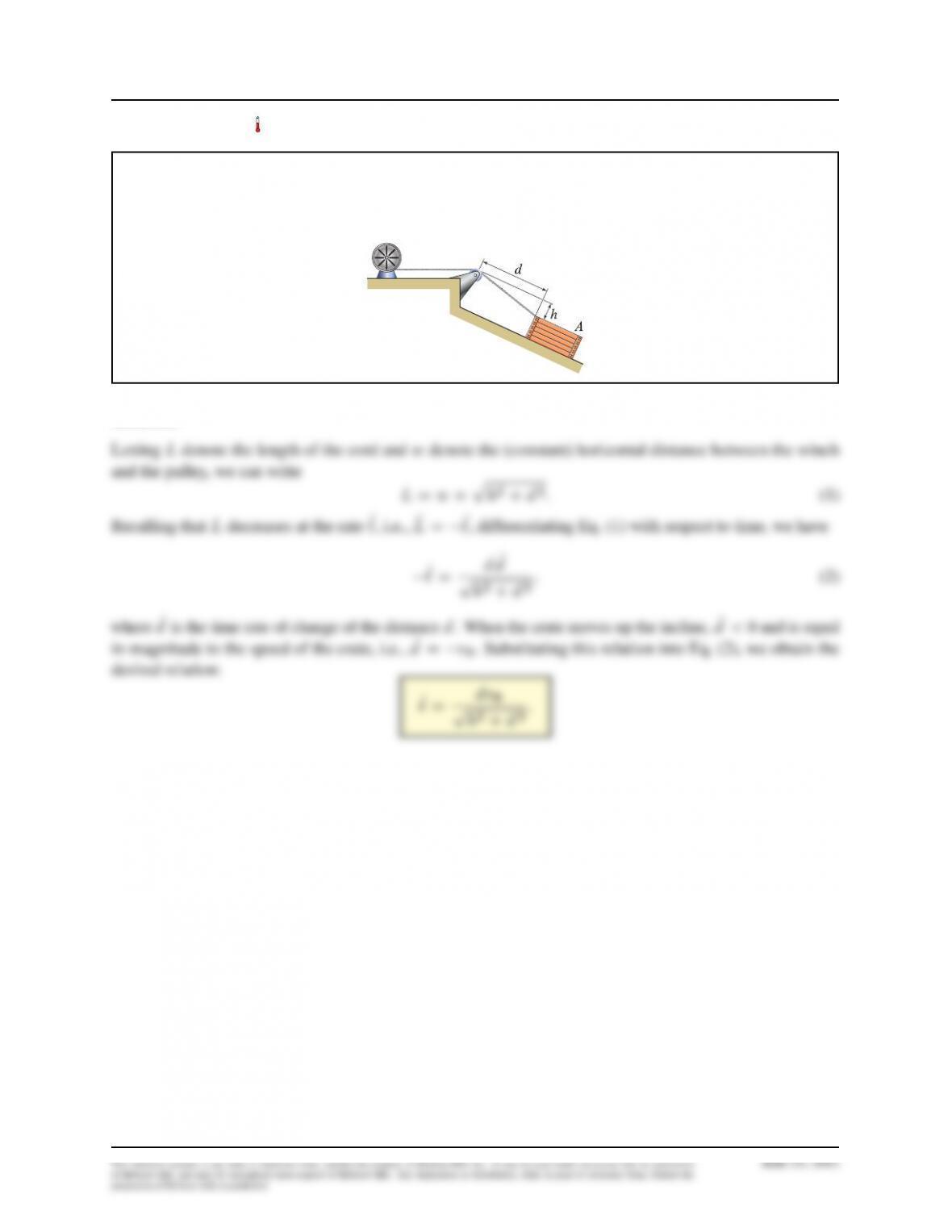
A crate
A
is being pulled up an inclined ramp by a winch. The rate of winding of the cord is controlled so
as to hoist the crate up the incline with a constant speed
v0
. Letting
P
`
denote the length of cord retracted
by the winch per unit time, determine an expression for P
`in terms of v0,h, and d.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 331
Problem 2.253
The piston head at
C
is constrained to move along the
y
axis. Let the crank
AB
be
rotating counterclockwise at a constant angular speed
P
✓D2000 rpm
,
RD3:5 in:
,
and LD5:3 in:Determine the velocity of Cwhen ✓D35ı.
Solution
Using the figure in the problem statement and the law of cosines, we have

332 Solutions Manual
Problem 2.254
Let
E!BC
denote the angular velocity of the relative position vector
ErC=B
. As such,
E!BC
is also the angular velocity of the connecting rod
BC
. Using the concept of
time derivative of a vector given in Section 2.4 on p. 80, determine the component
of the relative velocity of
C
with respect to
B
along the direction of the connecting
rod BC.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 333
Problem 2.255
The piston head at
C
is constrained to move along the
y
axis. Let the crank
AB
be
rotating counterclockwise at a constant angular speed
P
✓D2000 rpm
,
RD3:5 in:
,
and
LD5:3 in:
Determine expressions for the velocity and acceleration of
C
as a
function of ✓and the given parameters.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
334 Solutions Manual
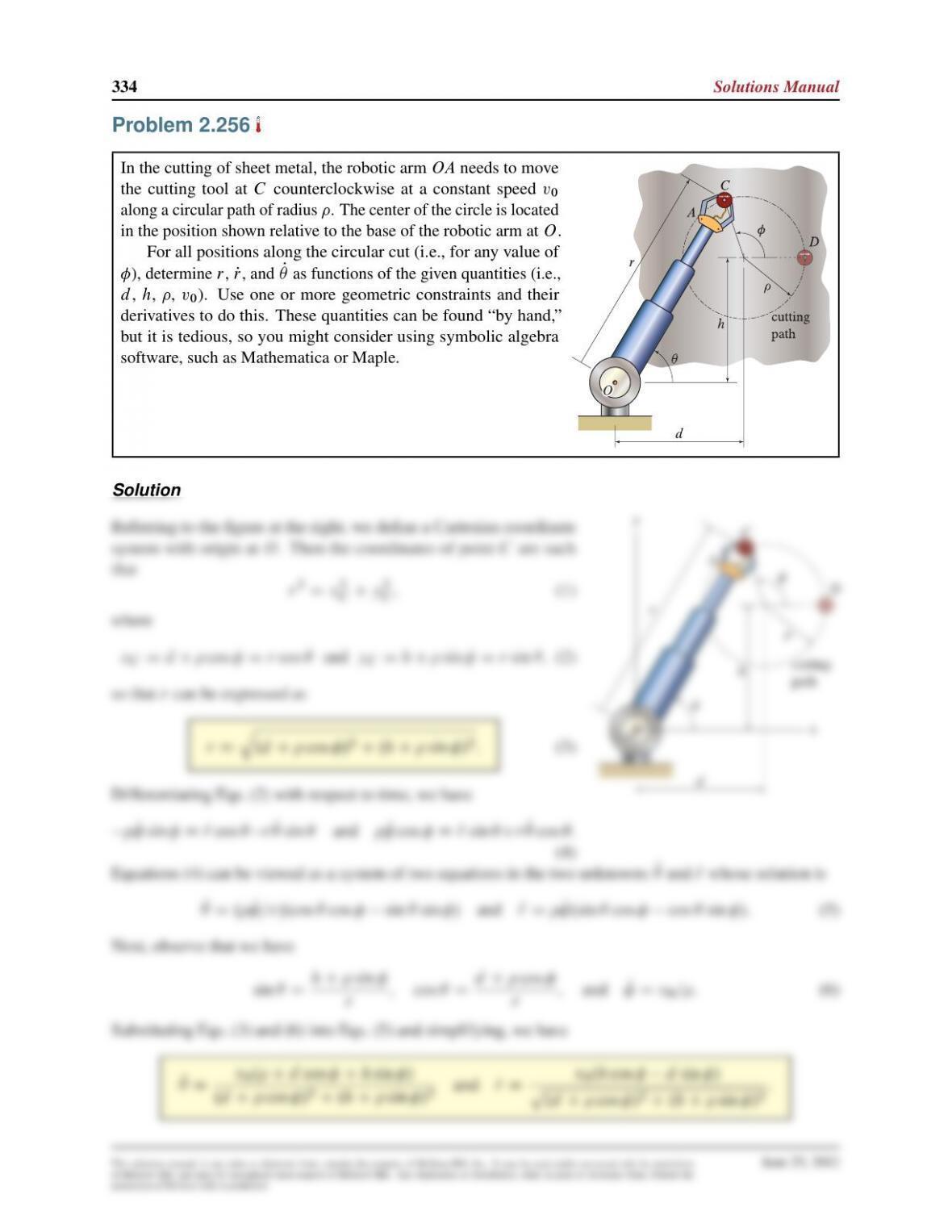
Problem 2.256
In the cutting of sheet metal, the robotic arm
OA
needs to move
the cutting tool at
C
counterclockwise at a constant speed
v0
along a circular path of radius
⇢
. The center of the circle is located
in the position shown relative to the base of the robotic arm at
O
.
For all positions along the circular cut (i.e., for any value of
), determine
r
,
Pr
, and
P
✓
as functions of the given quantities (i.e.,
d
,
h
,
⇢
,
v0
). Use one or more geometric constraints and their
derivatives to do this. These quantities can be found “by hand,”
but it is tedious, so you might consider using symbolic algebra
software, such as Mathematica or Maple.
Solution
Dynamics 2e 335
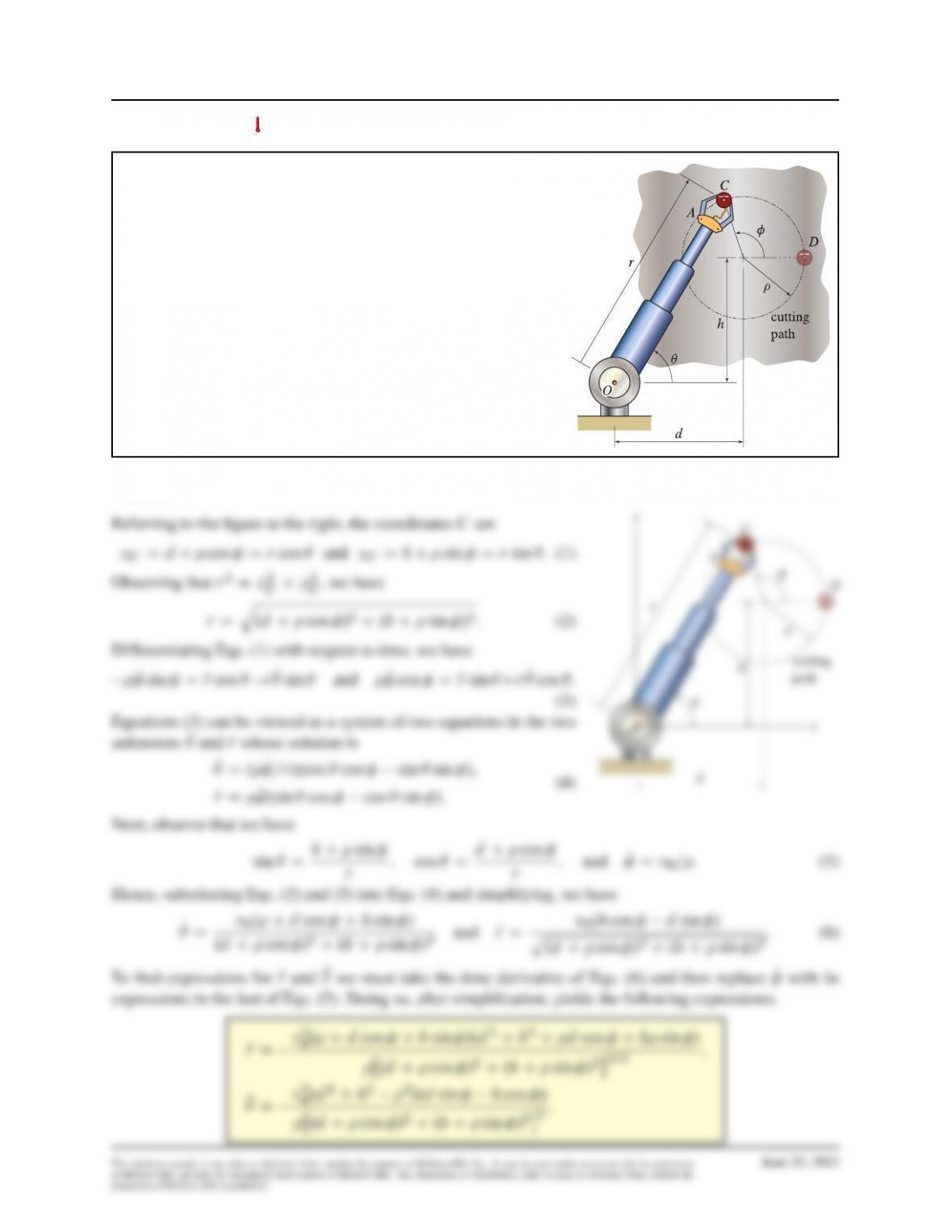
Problem 2.257
In the cutting of sheet metal, the robotic arm
OA
needs to move
the cutting tool at
C
counterclockwise at a constant speed
v0
along a circular path of radius
⇢
. The center of the circle is located
in the position shown relative to the base of the robotic arm at
O
.
For all positions along the circular cut (i.e., for any value of
), determine
Rr
and
R
✓
as functions of the given quantities (i.e.,
d
,
h
,
⇢
,
v0
). These quantities can be found by hand, but it is very
tedious, so you might consider using symbolic algebra software,
such as Mathematica or Maple.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

336 Solutions Manual
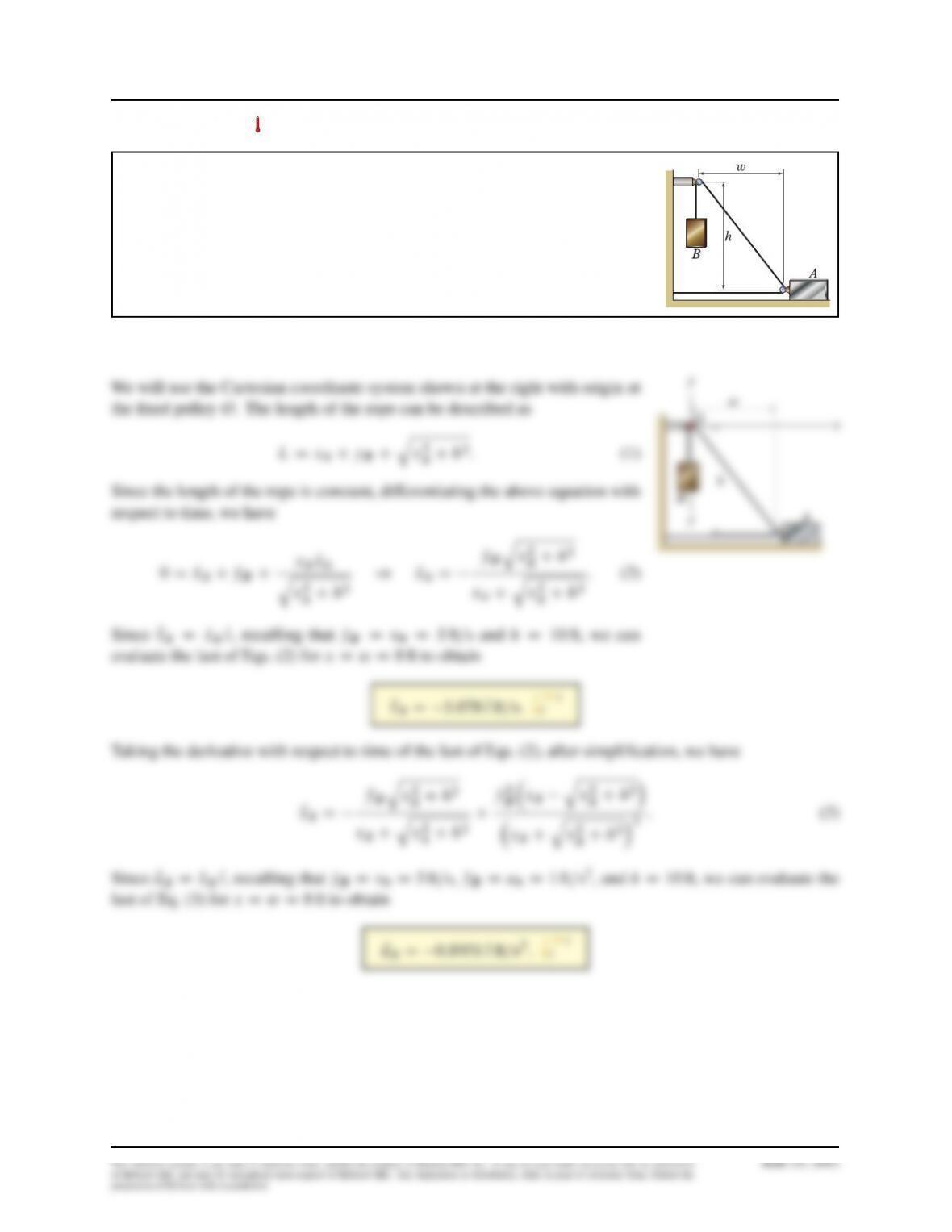
Problem 2.258
At the instant shown, block
A
is moving at a constant speed
v0D3m=s
to the
left and
wD2:3
m. Using
hD2:7
m, determine how much time is needed to
lower B 0:75 m from this position.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 337
Problem 2.259
At the instant shown,
hD10 ft
,
wD8ft
, and block
B
is moving with a speed
v0D5ft=s
and an acceleration
a0D1ft=s2
, both downward. Determine the
velocity and acceleration of block A.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
338 Solutions Manual
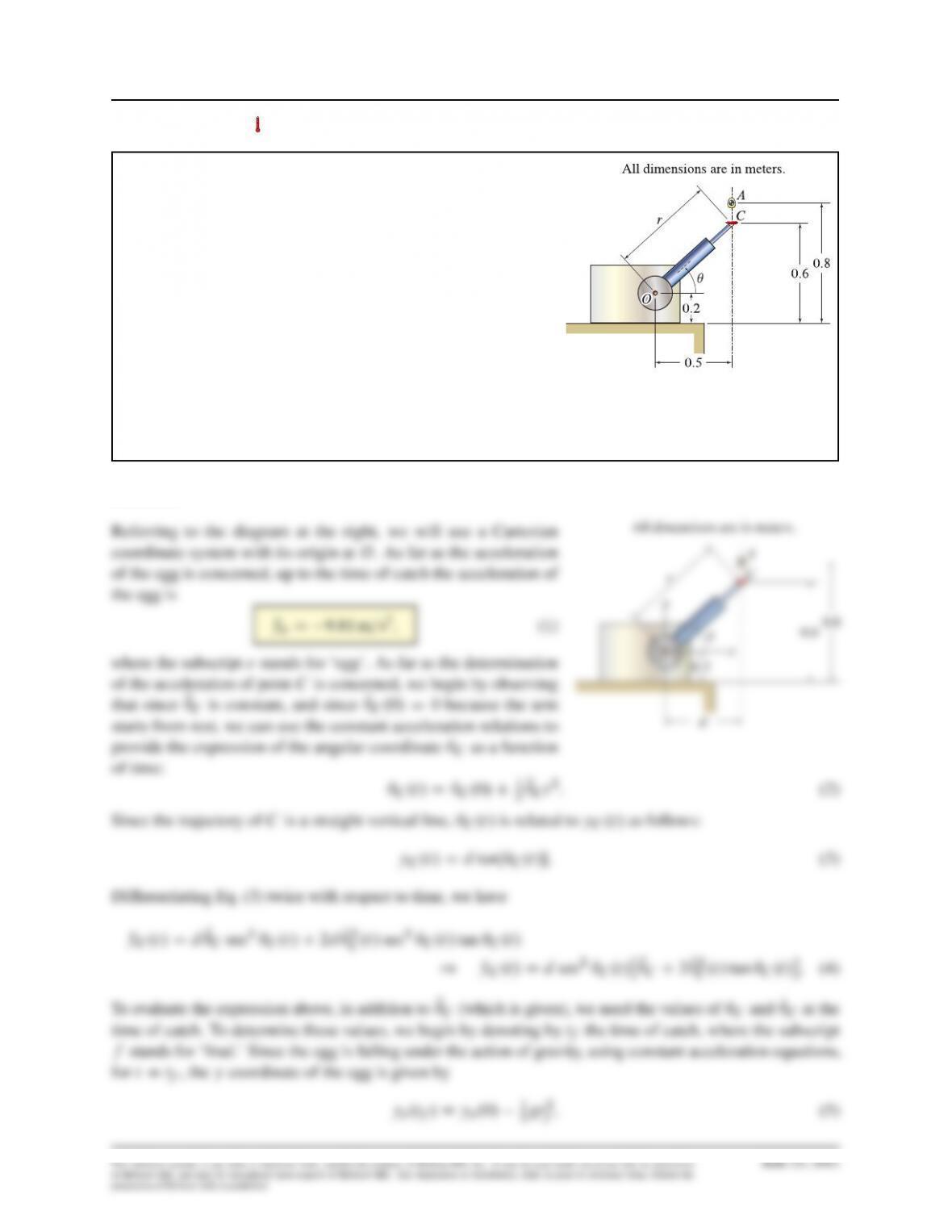
Problem 2.260
As a part of a robotics competition, a robotic arm with a rigid
open hand at
C
is to be designed so that the hand catches an
egg without breaking it. The egg is released from rest at
tD0
from point
A
. The arm, initially at rest in the position shown,
starts moving when the egg is released. The hand must catch
the egg without any impact with the egg. This can be done by
specifying that the hand and the egg must be at the same position
at the same time with identical velocities. A student proposes
to do this using a constant value of
R
✓
for which (after a fair bit
of work) it is found that the arm catches the egg at
tD0:4391
s
for
R
✓D13:27 rad=s2
. Using these values of
t
and
R
✓
, determine
the acceleration of both the hand and the egg at the time of catch.
Then, explain whether or not using a constant value of
R
✓
, as has
been proposed, is an acceptable strategy.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 339
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.