
270 Solutions Manual
P
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 271
Problem 2.204
The time derivative of the acceleration, i.e.,
P
Ea
, is usually referred to as the jerk. Starting from Eq. (2.70),
compute the jerk in polar coordinates.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

272 Solutions Manual
Problem 2.205
The reciprocating rectilinear motion mechanism shown consists of a disk
pinned at its center at
A
that rotates with a constant angular velocity
!AB
,
a slotted arm
CD
that is pinned at
C
, and a bar that can oscillate within
the guides at
E
and
F
. As the disk rotates, the peg at
B
moves within the
slotted arm, causing it to rock back and forth. As the arm rocks, it provides
a slow advance and a quick return to the reciprocating bar due to the
change in distance between
C
and
B
. Letting
✓D30ı
,
!AB D50 rpm
,
RD0:3 ft
, and
hD0:6 ft
, determine
P
and
R
, i.e., the angular velocity
and angular acceleration of the slotted arm CD, respectively.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 273
Problem 2.206
As a part of an assembly process, the end effector at
A
on the robotic arm needs
to move the gear at
B
along the vertical line shown with some known velocity
v0
and acceleration
a0
. Arm
OA
can vary its length by telescoping via internal
actuators, and a motor at Oallows it to pivot in the vertical plane.
When
✓D50ı
, it is required that
v0D8ft=s
(down) and that it be slowing
down at
a0D2ft=s2
. Using
hD4ft
, determine, at this instant, the values for
Rr(the extensional acceleration) and R
✓(the angular acceleration).
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

274 Solutions Manual
Problem 2.207
As a part of an assembly process, the end effector at
A
on the robotic arm needs
to move the gear at
B
along the vertical line shown with some known velocity
v0
and acceleration
a0
. Arm
OA
can vary its length by telescoping via internal
actuators, and a motor at Oallows it to pivot in the vertical plane.
Letting
v0
and
a0
be positive if the gear moves and accelerates upward,
determine expressions for r,Pr,Rr,P
✓, and R
✓that are valid for any value of ✓.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 275
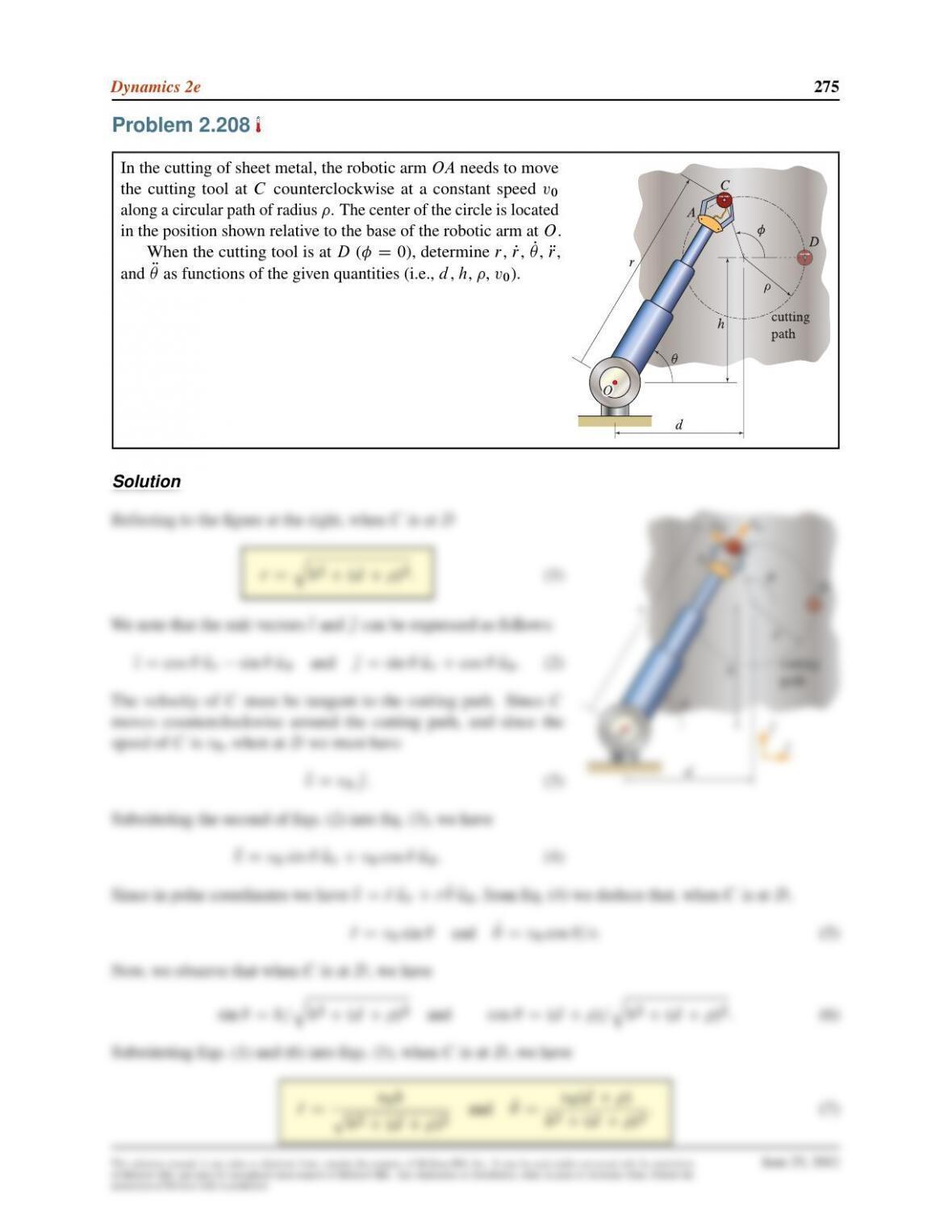
Problem 2.208
In the cutting of sheet metal, the robotic arm
OA
needs to move
the cutting tool at
C
counterclockwise at a constant speed
v0
along a circular path of radius
⇢
. The center of the circle is located
in the position shown relative to the base of the robotic arm at
O
.
When the cutting tool is at
D
(
D0
), determine
r
,
Pr
,
P
✓
,
Rr
,
and R
✓as functions of the given quantities (i.e., d,h,⇢,v0).
Solution

276 Solutions Manual
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 277
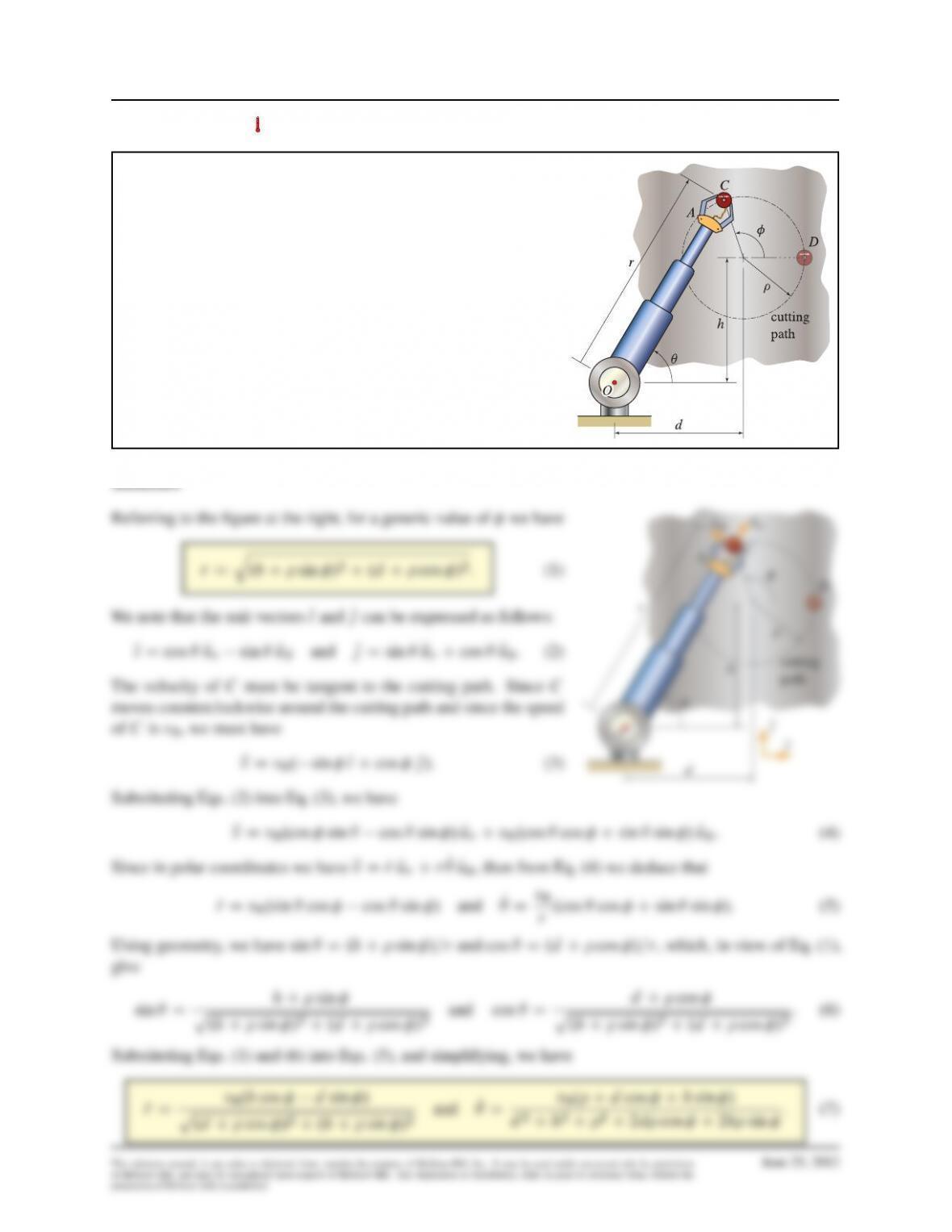
Problem 2.209
In the cutting of sheet metal, the robotic arm
OA
needs to move
the cutting tool at
C
counterclockwise at a constant speed
v0
along a circular path of radius
⇢
. The center of the circle is located
in the position shown relative to the base of the robotic arm at
O
.
For all positions along the circular cut (i.e., for any value of
), determine
r
,
Pr
,
P
✓
,
Rr
, and
R
✓
as functions of the given quantities
(i.e.,
d
,
h
,
⇢
,
v0
). These quantities can be found “by hand,” but it
is tedious, so you might consider using symbolic algebra software,
such as Mathematica or Maple.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

278 Solutions Manual
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 279
Problem 2.210
The cam is mounted on a shaft that rotates about
O
with constant angu-
lar velocity
!cam
. The profile of the cam is described by the function
`./DR0.1 C0:25 cos3/
, where the angle
is measured relative to
the segment
OA
, which rotates with the cam. Letting
!cam D3000 rpm
and
R0D3cm
, determine the velocity and acceleration of the follower
when
✓D33ı
. Express the acceleration of the follower in terms of
g
,
the acceleration due to gravity.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.