
180 Solutions Manual
Problem 2.124
Consider the four points whose positions are given by the vectors
ErAD
2O{C0O
km
,
ErBD2O{C1O
km
,
ErCD2O{C2O
km
, and
ErDD2O{C3O
km
.
Knowing that the magnitude of these vectors is constant and that the angular
velocity of these vectors at a given instant is
E!D5O
krad=s
, apply Eq. (2.48)
to find the velocities
EvA
,
EvB
,
EvC
, and
EvD
. Explain why all the velocity vectors
are the same even though the position vectors are not.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 181
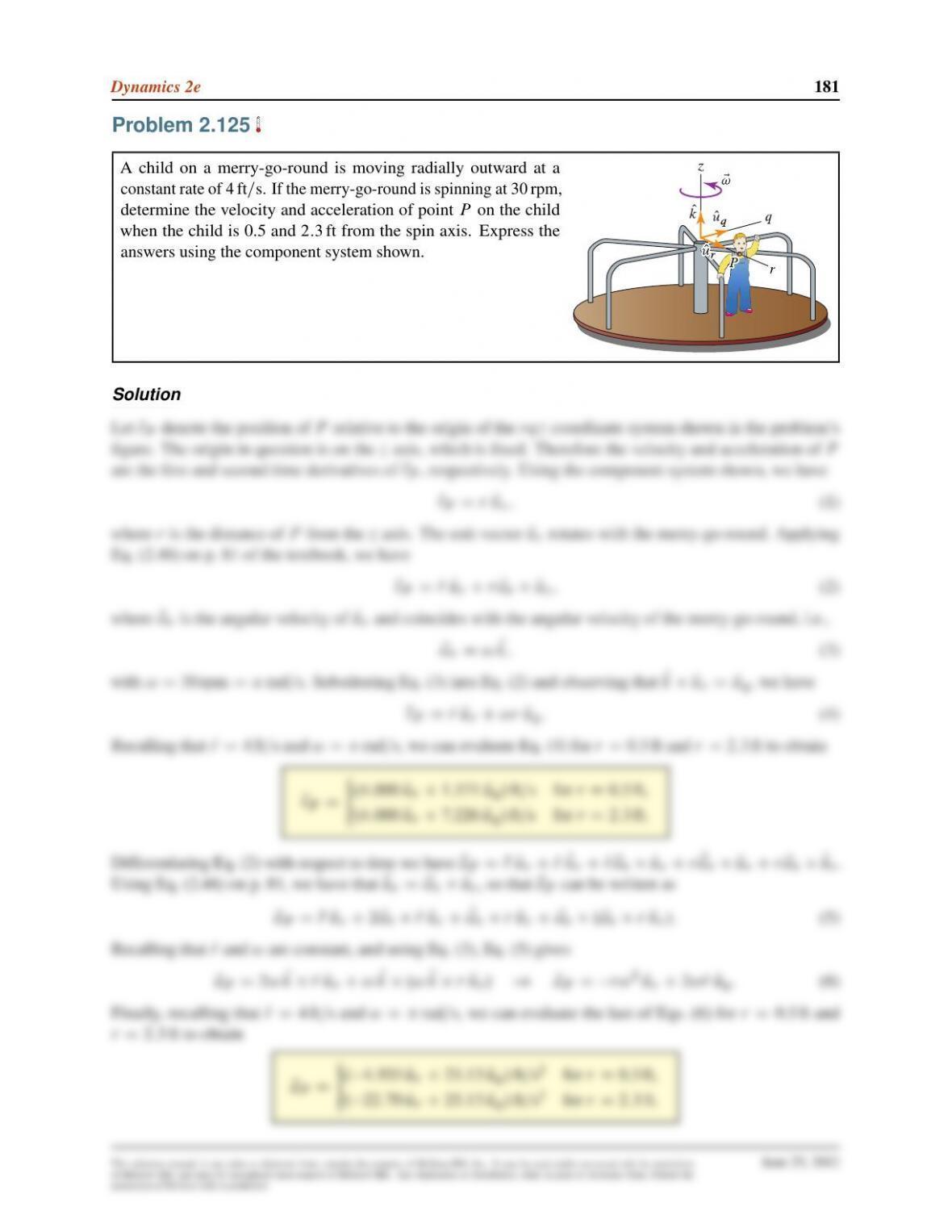
Problem 2.125
A child on a merry-go-round is moving radially outward at a
constant rate of
4ft=s
. If the merry-go-round is spinning at
30 rpm
,
determine the velocity and acceleration of point
P
on the child
when the child is 0.5 and
2:3 ft
from the spin axis. Express the
answers using the component system shown.
Solution
Let
ErP
denote the position of
P
relative to the origin of the
rq´
coordinate system shown in the problem’s
figure. The origin in question is on the
´
axis, which is fixed. Therefore the velocity and acceleration of
P

182 Solutions Manual
Problem 2.126
When a wheel rolls without slipping on a stationary surface, the point
O
on the wheel that is in contact
with the rolling surface has zero velocity. With this in mind, consider a nondeformable wheel rolling
without slip on a flat stationary surface. The center of the wheel
P
is traveling to the right with a constant
speed
v0D23 m=s
. Letting
RD0:35
m, determine the angular velocity of the wheel, using the stationary
component system shown.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 183
Problem 2.127
The radar station at
O
is tracking the meteor
P
as it moves through the
atmosphere. At the instant shown, the station measures the following data
for the motion of the meteor:
rD21;000 ft
,
✓D40ı
,
PrD22;440 ft=s
,
and
P
✓D2:935 rad=s
. Use Eq. (2.48) to determine the magnitude and
direction (relative to the
xy
coordinate system shown) of the velocity
vector at this instant.
Solution
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

184 Solutions Manual
Problem 2.128
The radar station at
O
is tracking the meteor
P
as it moves through the
atmosphere. At the instant shown, the station measures the following data
for the motion of the meteor:
rD21;000 ft
,
✓D40ı
,
PrD22;440 ft=s
,
P
✓D2:935 rad=s
,
RrD187;500 ft=s2
, and
R
✓D5:409 rad=s2
. Use the
equation derived in Prob. 2.122 to determine the magnitude and direction
(relative to the
xy
coordinate system shown) of the acceleration vector at
this instant.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 185
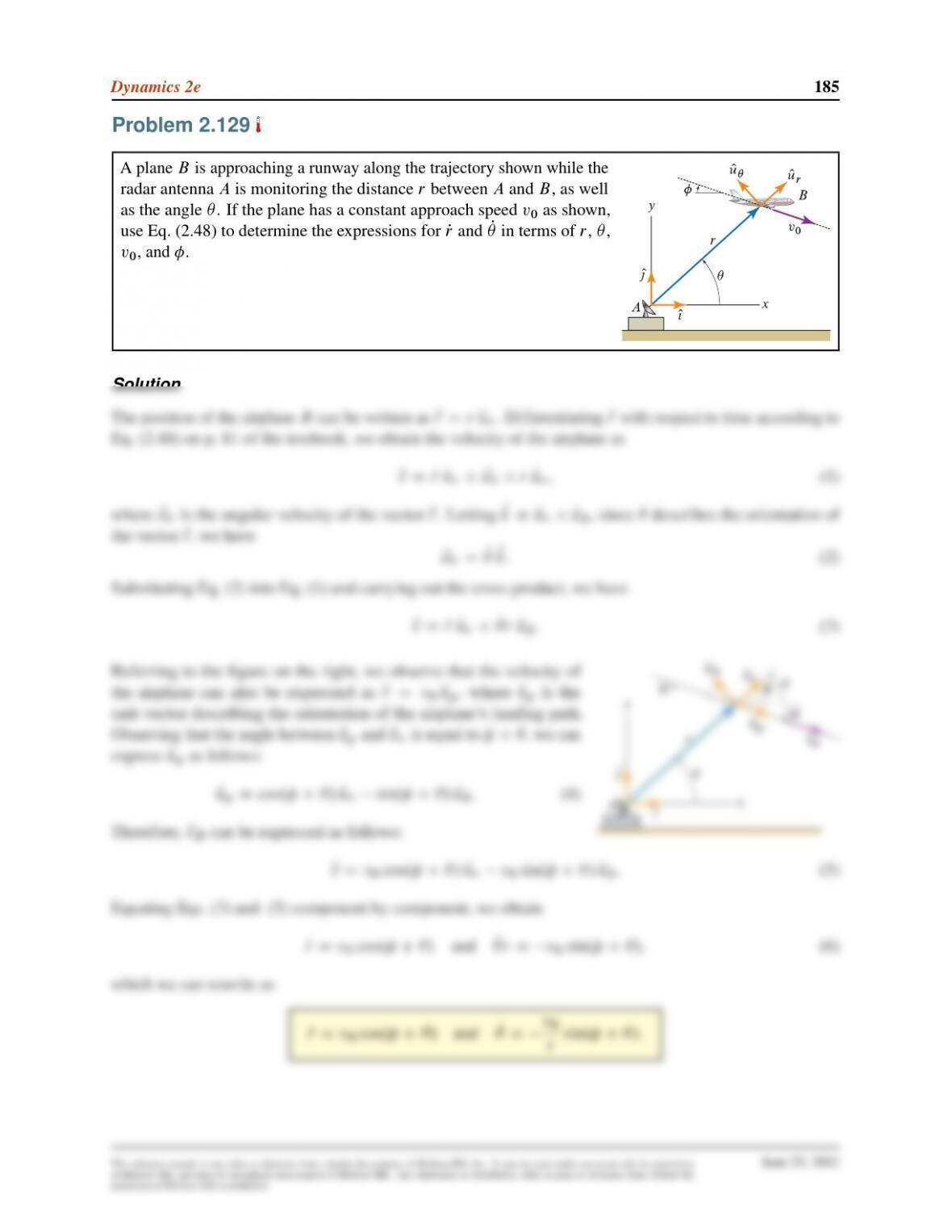
Problem 2.129
A plane
B
is approaching a runway along the trajectory shown while the
radar antenna
A
is monitoring the distance
r
between
A
and
B
, as well
as the angle
✓
. If the plane has a constant approach speed
v0
as shown,
use Eq. (2.48) to determine the expressions for
Pr
and
P
✓
in terms of
r
,
✓
,
v0, and .
Solution
The position of the airplane
B
can be written as
ErDrOur
. Differentiating
Er
with respect to time according to

186 Solutions Manual
Problem 2.130
A plane
B
is approaching a runway along the trajectory shown with
D15ı
, while the radar antenna
A
is monitoring the distance
r
between
A
and
B
, as well as the angle
✓
. The plane has a constant approach
speed
v0
. In addition, when
✓D20ı
, it is known that
PrD216 ft=s
and
P
✓D0:022 rad=s
. Use Eq. (2.48) to determine the corresponding values
of v0and of the distance between the plane and the radar antenna.
Solution
The position of the airplane
B
can be written as
ErDrOur
. Differentiating
Er
with respect to time according to
Eq. (2.48) on p. 81 of the textbook, we obtain the velocity of the airplane as

Dynamics 2e 187
Problem 2.131
The end
B
of a robot arm is being extended with the constant rate
PrD4ft=s
.
Knowing that
P
✓D0:4 rad=s
and is constant, use Eq. (2.48) and the equation
derived in Prob. 2.122 to determine the velocity and acceleration of
B
when
rD2ft. Express your answer using the component system shown.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

188 Solutions Manual
Problem 2.132
The end
B
of a robot arm is moving vertically down with a constant speed
v0D2m=s
. Letting
dD1:5
m, apply Eq. (2.48) to determine the rate at which
rand ✓are changing when ✓D37ı.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 189
Problem 2.133
The end
B
of a robot arm is moving vertically down with a constant speed
v0D6ft=s
. Letting
dD4ft
, use Eq. (2.48) and the equation derived in
Prob. 2.122 to determine Pr,P
✓,Rr, and R
✓when ✓D0ı.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.