
Dynamics 2e 2129
0D.R `/ ˛AB´ C!ABx!ABy Ch˛ABx C!ABy !AB´Cd!2
ABx C!2
AB´;
0Dh⇣!2
ABx C!2
ABy ⌘C.R `/ ˛ABy !ABx !AB´d˛ABx C!ABy !AB´:
We obtain the fourth equation by writing that the angular acceleration of bar
AB
must be orthogonal to the
bar, that is
E˛AB ErA=B D0).` R/˛ABx d˛
ABy Ch˛AB´ D0:
Solving these four equations, substituting the solutions for the components of
E!AB
, as well as the expression
for `found above, and simplifying we obtain
dcos ✓
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2130 Solutions Manual
and we find the acceleration of the collar Ato be
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2131
Problem 10.33
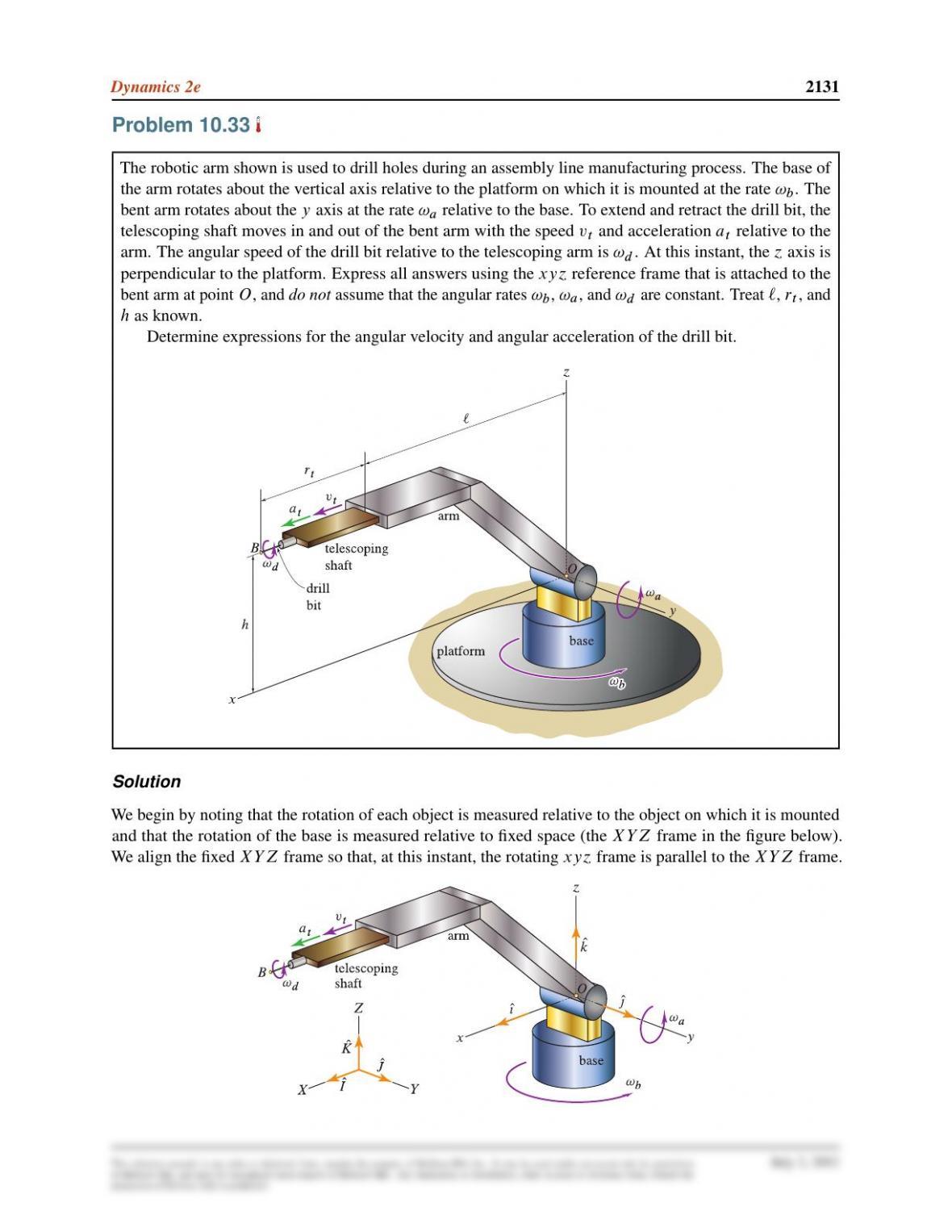
The robotic arm shown is used to drill holes during an assembly line manufacturing process. The base of
the arm rotates about the vertical axis relative to the platform on which it is mounted at the rate
!b
. The
bent arm rotates about the yaxis at the rate !arelative to the base. To extend and retract the drill bit, the
telescoping shaft moves in and out of the bent arm with the speed
vt
and acceleration
at
relative to the
arm. The angular speed of the drill bit relative to the telescoping arm is
!d
. At this instant, the
´
axis is
perpendicular to the platform. Express all answers using the
xy´
reference frame that is attached to the
bent arm at point
O
, and do not assume that the angular rates
!b
,
!a
, and
!d
are constant. Treat
`
,
rt
, and
has known.
Determine expressions for the angular velocity and angular acceleration of the drill bit.
Solution
We begin by noting that the rotation of each object is measured relative to the object on which it is mounted
and that the rotation of the base is measured relative to fixed space (the
XYZ
frame in the figure below).
We align the fixed
XYZ
frame so that, at this instant, the rotating
xy´
frame is parallel to the
XYZ
frame.
This solutions manual, in any print or electronic form, remains the property of McGraw-Hill, Inc. It may be used and/or possessed only by permission
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
July 2, 2012

2132 Solutions Manual
Therefore, the angular velocity of the drill bit is the vector sum of each individual angular velocity, that is,
E!bit D!bO
KC!aO|C!dO{) E!bit D!dO{C!aO|C!bO
k,
where we have used the fact that, at this instant,
O
KDO
k
. To find the angular acceleration of the drill bit, we
differentiate the angular velocity relation to obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2133
Problem 10.34
The robotic arm shown is used to drill holes during an assembly line manufacturing process. The base of
the arm rotates about the vertical axis relative to the platform on which it is mounted at the rate
!b
. The
bent arm rotates about the yaxis at the rate !arelative to the base. To extend and retract the drill bit, the
telescoping shaft moves in and out of the bent arm with the speed
vt
and acceleration
at
relative to the
arm. The angular speed of the drill bit relative to the telescoping arm is
!d
. At this instant, the
´
axis is
perpendicular to the platform. Express all answers using the
xy´
reference frame that is attached to the
bent arm at point
O
, and do not assume that the angular rates
!b
,
!a
, and
!d
are constant. Treat
`
,
rt
, and
has known.
Determine expressions for the velocity of point Bat the end of the drill bit.
Solution
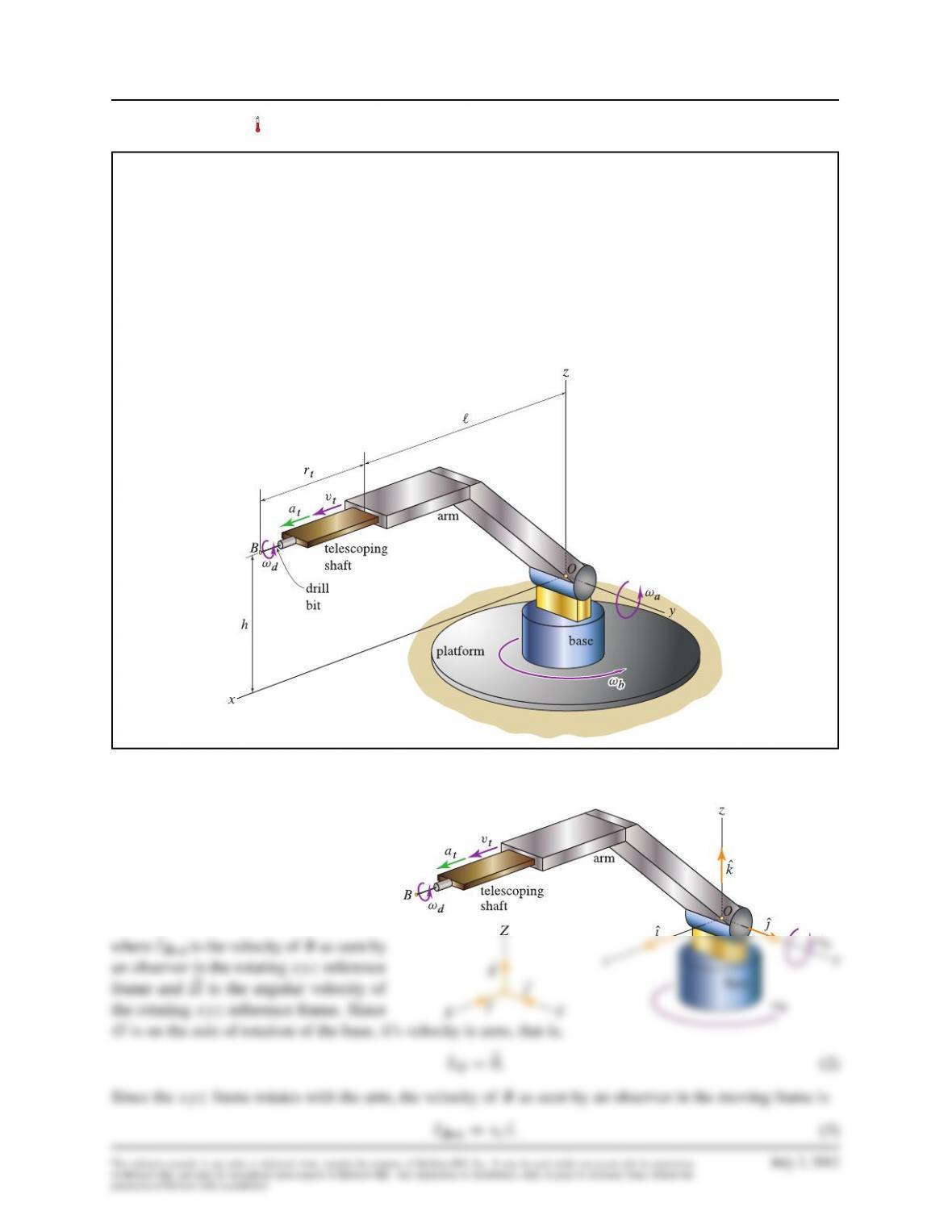
Referring to the figure on the right, to de-
termine the velocity of the tip of the drill
bit at
B
, we can relate it to the velocity
of point Ousing
EvBDEvOCEvBrel CE
˝⇥ErB=O;(1)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2134 Solutions Manual
The angular velocity of the rotating frame is
E
˝D!aO|C!bO
KD!aO|C!bO
k; (4)
where we have used the fact that, at this instant, O
KDO
k. Finally, the position of Brelative to Ois
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2135
Problem 10.35
The robotic arm shown is used to drill holes during an assembly line manufacturing process. The base of
the arm rotates about the vertical axis relative to the platform on which it is mounted at the rate
!b
. The
bent arm rotates about the yaxis at the rate !arelative to the base. To extend and retract the drill bit, the
telescoping shaft moves in and out of the bent arm with the speed
vt
and acceleration
at
relative to the
arm. The angular speed of the drill bit relative to the telescoping arm is
!d
. At this instant, the
´
axis is
perpendicular to the platform. Express all answers using the
xy´
reference frame that is attached to the
bent arm at point
O
, and do not assume that the angular rates
!b
,
!a
, and
!d
are constant. Treat
`
,
rt
, and
has known.
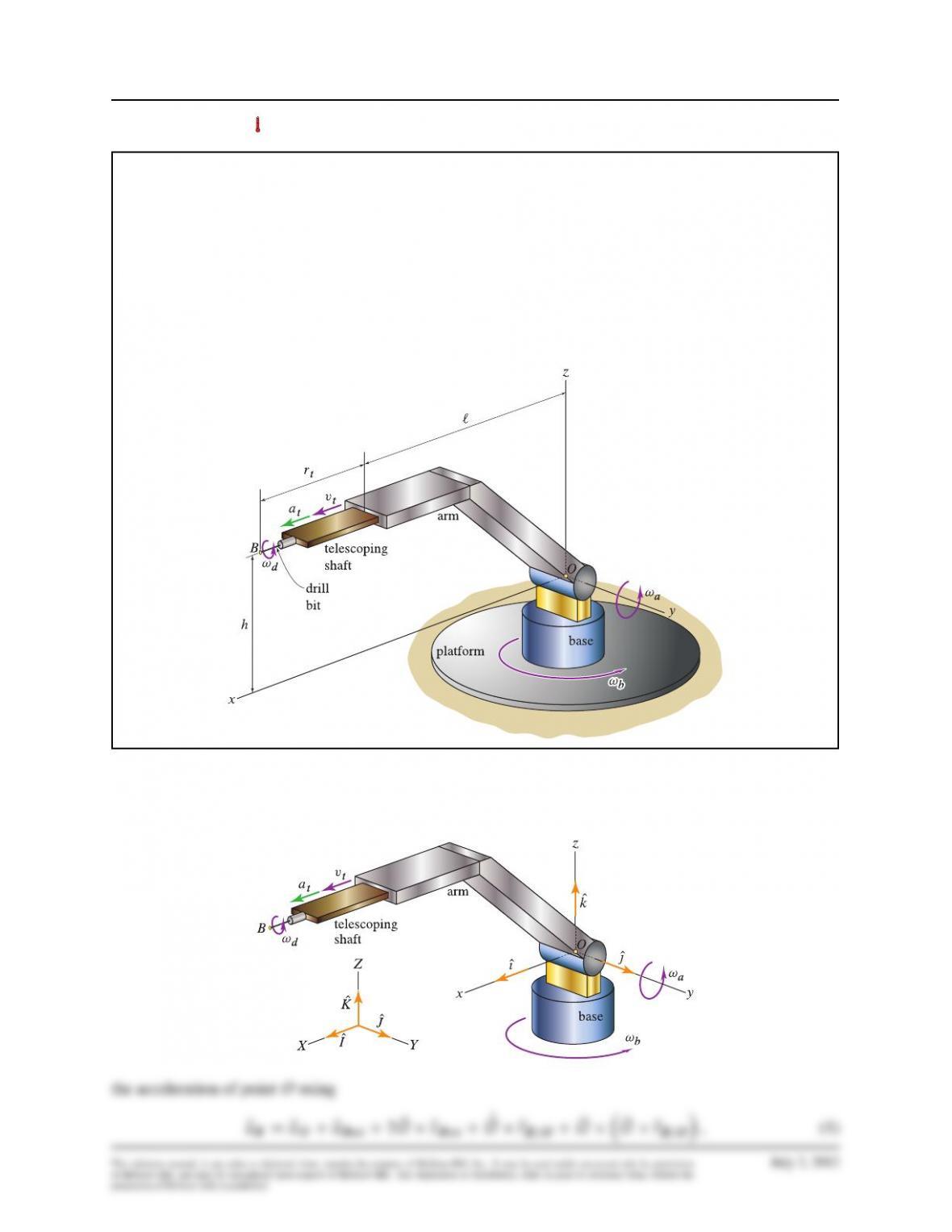
Determine expressions for the acceleration of point Bat the end of the drill bit.
Solution
Referring to the figure on the below, to determine the acceleration of the tip of the drill bit, we can relate it to
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2136 Solutions Manual
where
EaBrel
is the acceleration of
B
as seen by an observer in the rotating
xy´
reference frame,
EvBrel
is the
velocity of
B
as seen by an observer in the rotating
xy´
reference frame,
P
E
˝
is the angular acceleration of the
rotating
xy´
reference frame, and
E
˝
is the angular velocity of the rotating
xy´
reference frame. Since
O
is
on the axis of rotation of the base, it’s acceleration is zero, that is,
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2137
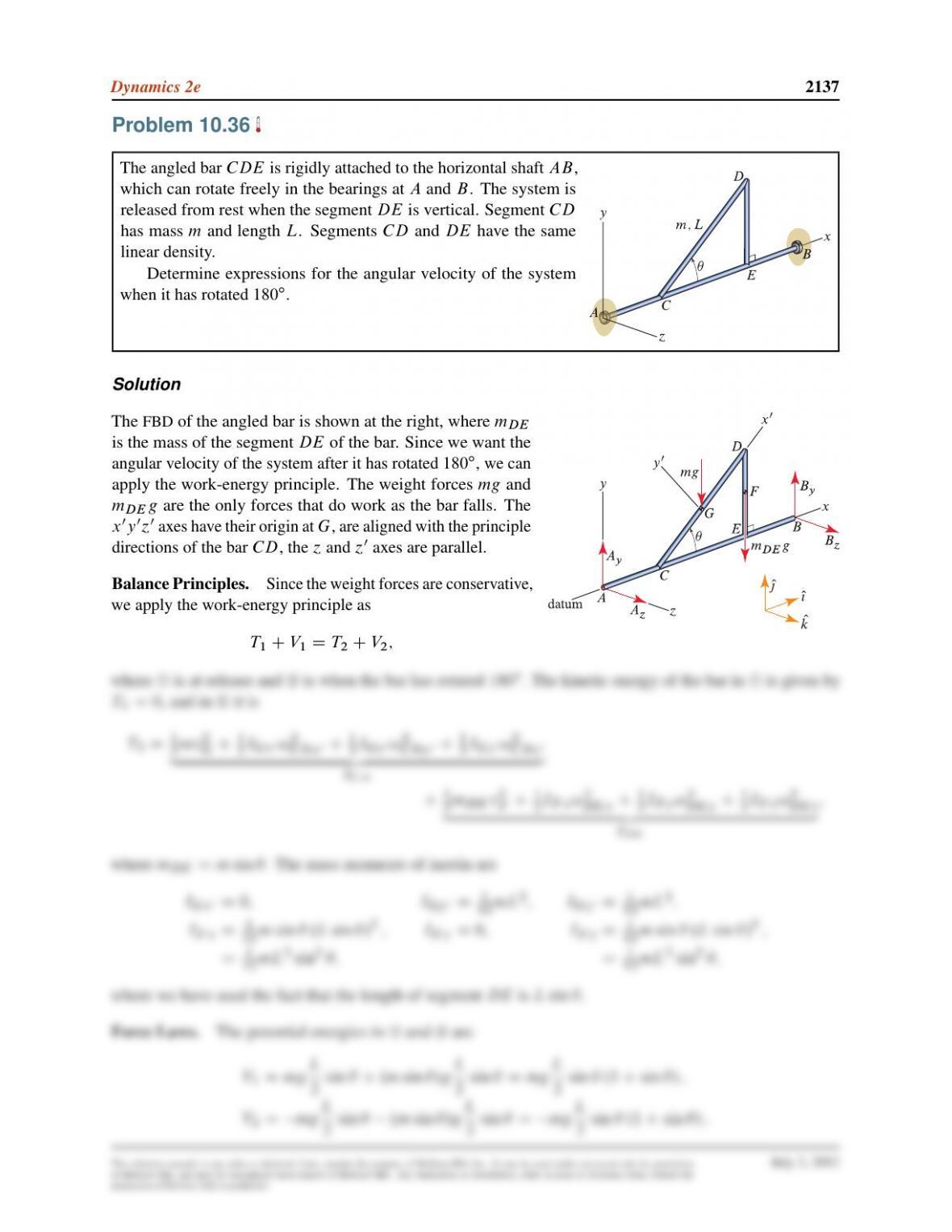
Problem 10.36
The angled bar
CDE
is rigidly attached to the horizontal shaft
AB
,
which can rotate freely in the bearings at
A
and
B
. The system is
released from rest when the segment
DE
is vertical. Segment
CD
has mass
m
and length
L
. Segments
CD
and
DE
have the same
linear density.
Determine expressions for the angular velocity of the system
when it has rotated 180ı.
Solution
The FBD of the angled bar is shown at the right, where
mDE
is the mass of the segment
DE
of the bar. Since we want the
angular velocity of the system after it has rotated
180ı
, we can
apply the work-energy principle. The weight forces
mg
and
mDE g
are the only forces that do work as the bar falls. The
x0y0´0
axes have their origin at
G
, are aligned with the principle
directions of the bar CD, the ´and ´0axes are parallel.
Balance Principles.
Since the weight forces are conservative,
we apply the work-energy principle as
T1CV1DT2CV2;
where
¿
is at release and
¡
is when the bar has rotated
180ı
. The kinetic energy of the bar in
¿
is given by
T1D0, and in ¡it is

2138 Solutions Manual
Kinematic Equations. The components of the angular velocity of the bar in the xy´ frame are
!DE x D!bar;!
DE y D0; and !DE ´ D0;
and the components of the angular velocity in the x0y0´0frame are
!CDx0D!bar cos ✓; !CDy0D!bar sin ✓;and !CD´0D0:
The speed of points Gand Fin terms of !bar are
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.