Unlock document.
This document is partially blurred.
Unlock all pages and 1 million more documents.
Get Access
Dynamics 2e 2109
Problem 10.25
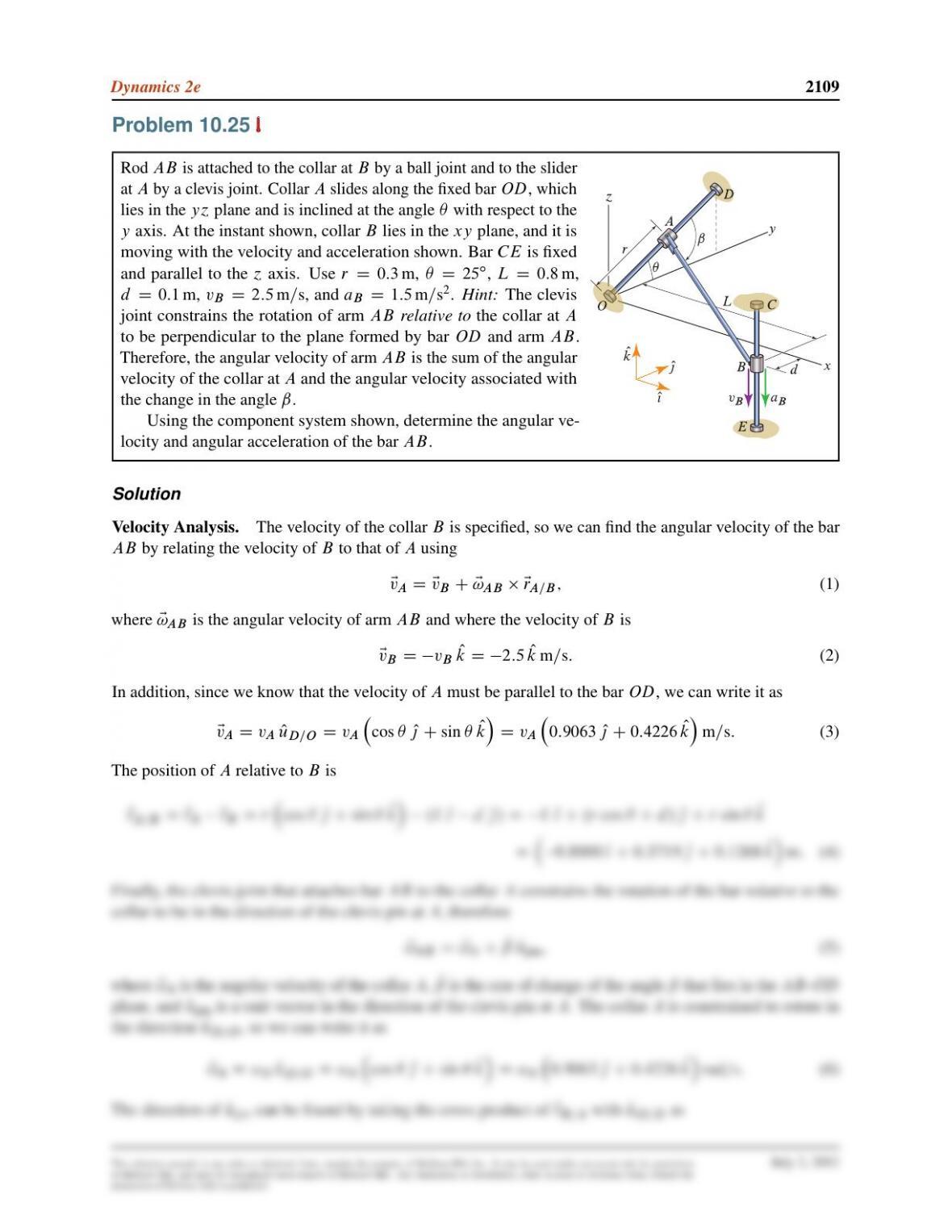
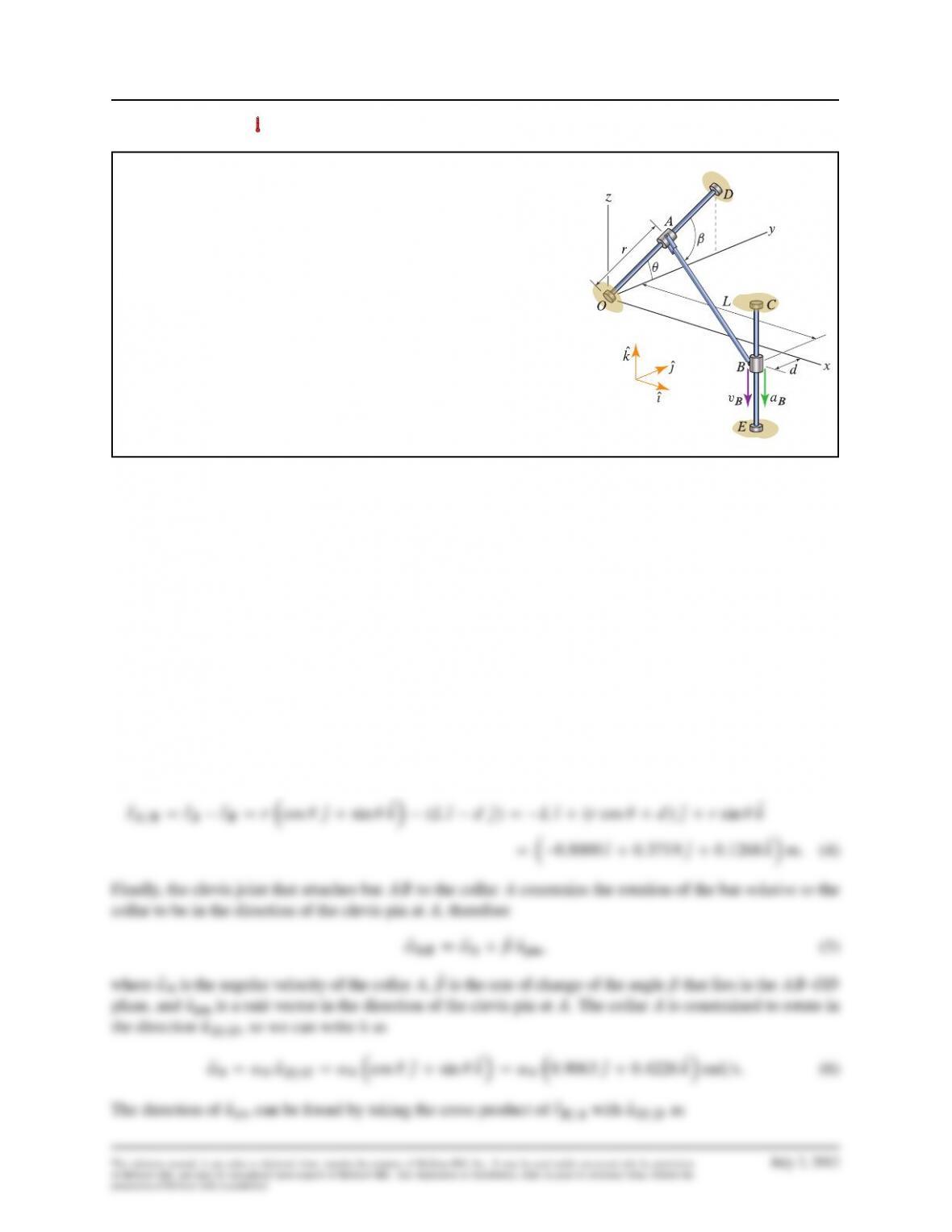
Rod
AB
is attached to the collar at
B
by a ball joint and to the slider
at
A
by a clevis joint. Collar
A
slides along the fixed bar
OD
, which
lies in the
y´
plane and is inclined at the angle
✓
with respect to the
y
axis. At the instant shown, collar
B
lies in the
xy
plane, and it is
moving with the velocity and acceleration shown. Bar
CE
is fixed
and parallel to the
´
axis. Use
rD0:3
m,
✓D25ı
,
LD0:8
m,
dD0:1
m,
vBD2:5 m=s
, and
aBD1:5 m=s2
.Hint: The clevis
joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the plane formed by bar
OD
and arm
AB
.
Therefore, the angular velocity of arm
AB
is the sum of the angular
velocity of the collar at
A
and the angular velocity associated with
the change in the angle ˇ.
Using the component system shown, determine the angular ve-
locity and angular acceleration of the bar AB.
Solution
Velocity Analysis.
The velocity of the collar
B
is specified, so we can find the angular velocity of the bar
AB by relating the velocity of Bto that of Ausing
EvADEvBCE!AB ⇥ErA=B ;(1)
where E!AB is the angular velocity of arm AB and where the velocity of Bis
EvBDvBO
kD2:5 O
km=s:(2)
In addition, since we know that the velocity of Amust be parallel to the bar OD, we can write it as
EvADvAOuD=O DvA⇣cos ✓O|Csin ✓O
k⌘DvA⇣0:9063 O|C0:4226 O
k⌘m=s:(3)
The position of Arelative to Bis
ErA=B DErAErBDr⇣cos ✓O|Csin ✓O
k⌘.LO{dO|/DLO{C.r cos ✓Cd/ O|Crsin ✓O
k

2110 Solutions Manual
Oupin DOuD=O ⇥ErB=A
ˇˇOuD=O ⇥ErB=AˇˇD1
pL2Cd2sin2✓⇣dsin ✓O{CLsin ✓O|Lcos ✓O
k⌘
D⇣0:05275 O{C0:4220 O|0:9050 O
k⌘;(7)
where
ErB=A DErA=B
, which is given in Eq. (
??
). Substituting Eqs. (
??
) and (
??
) into Eq. (
??
) and then
substituting Eqs. (??)–(??) into Eq. (??), we obtain
0:9063vAO|C0:4226vAO
kD⇣0:3901 P
ˇ0:04226!A⌘O{C⇣0:7173 P
ˇ0:3381!A⌘O|
C⇣2:500 C0:3572 P
ˇC0:7250!A⌘O
k;
which is equivalent to the following three scalar equations
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2111
from Eq. (
??
), we substituted in
OuD=O
,
Oupin
,
E!A
,
P
ˇ
, and
!A
using the expressions found above. Substituting
Eqs. (??), (??), (??), (??), and (??) into Eq. (??) we obtain
0:9063aAO|C0:4226aAO
kD⇣6:492 C0:3901 R
ˇ0:04226 P!A⌘O{
C⇣0:1077 C0:7173 R
ˇ0:3381 P!A⌘O|
C⇣1:817 C0:3572 R
ˇC0:7250 P!A⌘O
k;
which is equivalent to the following three scalar equations
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2112 Solutions Manual
Problem 10.26
Rod
AB
is attached to the collar at
B
by a ball joint and to the slider
at
A
by a clevis joint. Collar
A
slides along the fixed bar
OD
, which
lies in the
y´
plane and is inclined at the angle
✓
with respect to the
y
axis. At the instant shown, collar
B
lies in the
xy
plane, and it is
moving with the velocity and acceleration shown. Bar
CE
is fixed
and parallel to the
´
axis. Use
rD0:3
m,
✓D25ı
,
LD0:8
m,
dD0:1
m,
vBD2:5 m=s
, and
aBD1:5 m=s2
.Hint: The clevis
joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the plane formed by bar
OD
and arm
AB
.
Therefore, the angular velocity of arm
AB
is the sum of the angular
velocity of the collar at
A
and the angular velocity associated with
the change in the angle ˇ.
Using the component system shown, determine the velocity and
acceleration of the collar at A.
Solution
Velocity Analysis.
The velocity of the collar
B
is specified, so we can find the angular velocity of the bar
AB by relating the velocity of Bto that of Ausing
EvADEvBCE!AB ⇥ErA=B ;(1)
where E!AB is the angular velocity of arm AB and where the velocity of Bis
EvBDvBO
kD2:5 O
km=s:(2)
In addition, since we know that the velocity of Amust be parallel to the bar OD, we can write it as
EvADvAOuD=O DvA⇣cos ✓O|Csin ✓O
k⌘DvA⇣0:9063 O|C0:4226 O
k⌘m=s:(3)
The position of Arelative to Bis
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2113
Oupin DOuD=O ⇥ErB=A
ˇˇOuD=O ⇥ErB=AˇˇD1
pL2Cd2sin2✓⇣dsin ✓O{CLsin ✓O|Lcos ✓O
k⌘
D⇣0:05275 O{C0:4220 O|0:9050 O
k⌘;(7)
where
ErB=A DErA=B
, which is given in Eq. (
??
). Substituting Eqs. (
??
) and (
??
) into Eq. (
??
) and then
substituting Eqs. (??)–(??) into Eq. (??), we obtain
0:9063vAO|C0:4226vAO
kD⇣0:3901 P
ˇ0:04226!A⌘O{C⇣0:7173 P
ˇ0:3381!A⌘O|
C⇣2:500 C0:3572 P
ˇC0:7250!A⌘O
k;
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2114 Solutions Manual
from Eq. (
??
), we substituted in
OuD=O
,
Oupin
,
E!A
,
P
ˇ
, and
!A
using the expressions found above. Substituting
Eqs. (??), (??), (??), (??), and (??) into Eq. (??) we obtain
0:9063aAO|C0:4226aAO
kD⇣6:492 C0:3901 R
ˇ0:04226 P!A⌘O{
C⇣0:1077 C0:7173 R
ˇ0:3381 P!A⌘O|
C⇣1:817 C0:3572 R
ˇC0:7250 P!A⌘O
k;
which is equivalent to the following three scalar equations
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2115
Problem 10.27
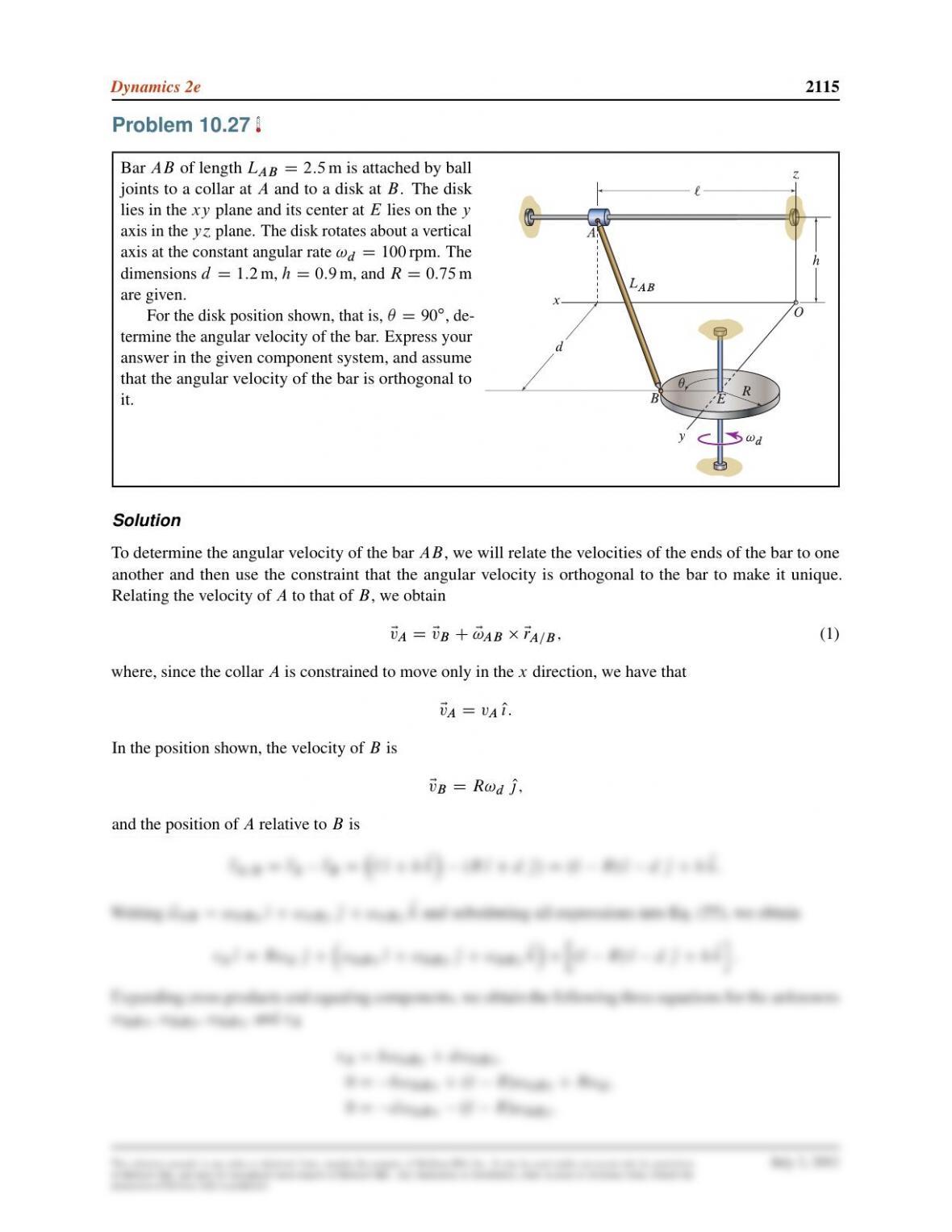
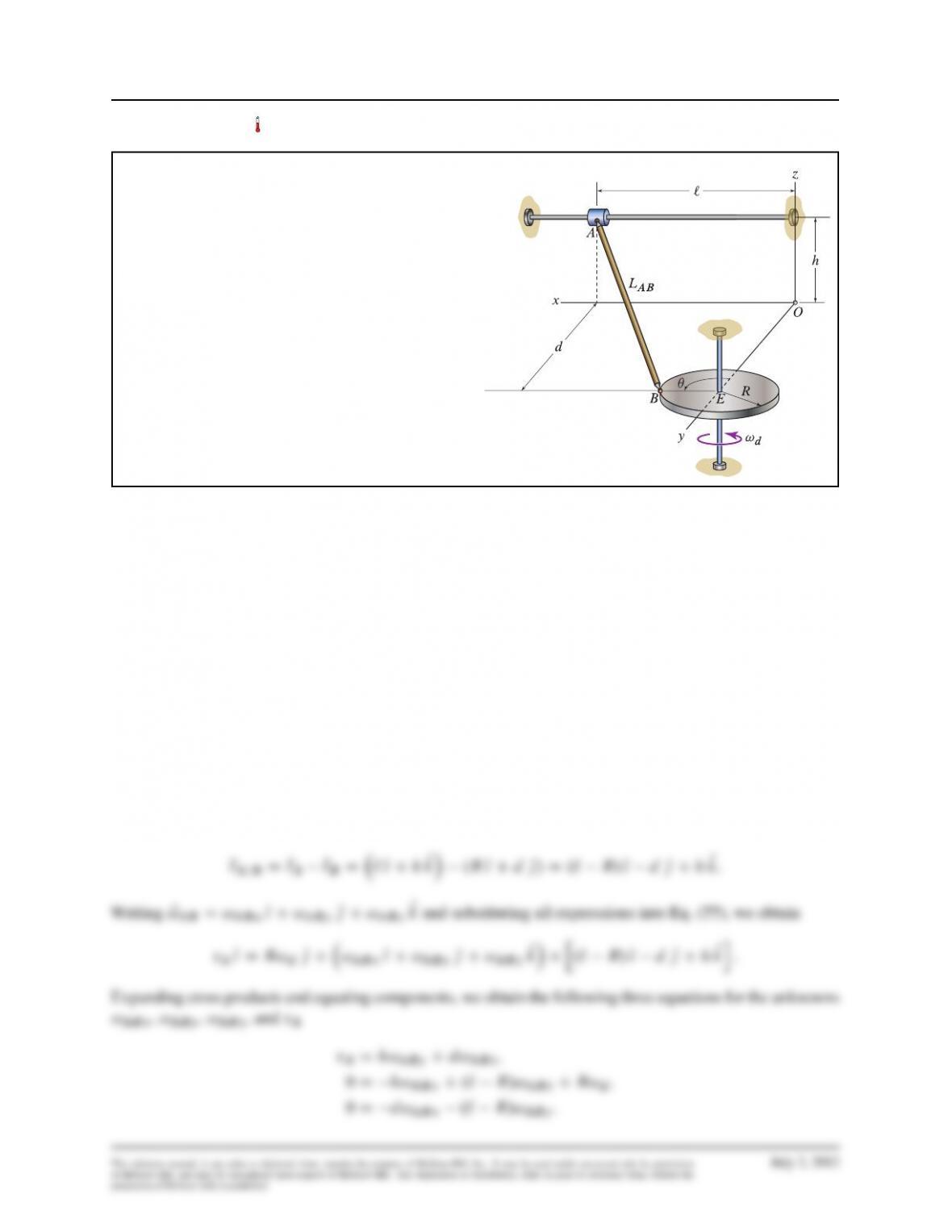
Bar
AB
of length
LAB D2:5
m is attached by ball
joints to a collar at
A
and to a disk at
B
. The disk
lies in the
xy
plane and its center at
E
lies on the
y
axis in the
y´
plane. The disk rotates about a vertical
axis at the constant angular rate
!dD100 rpm
. The
dimensions
dD1:2
m,
hD0:9
m, and
RD0:75
m
are given.
For the disk position shown, that is,
✓D90ı
, de-
termine the angular velocity of the bar. Express your
answer in the given component system, and assume
that the angular velocity of the bar is orthogonal to
it.
Solution
To determine the angular velocity of the bar
AB
, we will relate the velocities of the ends of the bar to one
another and then use the constraint that the angular velocity is orthogonal to the bar to make it unique.
Relating the velocity of Ato that of B, we obtain
EvADEvBCE!AB ⇥ErA=B ;(1)
where, since the collar Ais constrained to move only in the xdirection, we have that
EvADvAO{:
In the position shown, the velocity of Bis
EvBDR!dO|;
and the position of Arelative to Bis
ErA=B DErAErBD⇣`O{ChO
k⌘.RO{CdO|/D.` R/ O{dO|ChO
k:

2116 Solutions Manual
Writing that the angular velocity of bar AB must be orthogonal to the bar, we obtain the fourth equation as
E!AB ErA=B D0).` R/!ABx d!
ABy Ch!AB´ D0:
Solving these four equations for the four unknowns listed above, we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2117
Problem 10.28
Bar
AB
of length
LAB D2:5
m is attached by ball
joints to a collar at
A
and to a disk at
B
. The disk
lies in the
xy
plane and its center at
E
lies on the
y
axis in the
y´
plane. The disk rotates about a vertical
axis at the constant angular rate
!dD100 rpm
. The
dimensions
dD1:2
m,
hD0:9
m, and
RD0:75
m
are given.
For the disk position shown, that is,
✓D90ı
,
determine the angular acceleration of the bar. Ex-
press your answer in the given component system,
and assume that the angular velocity and angular
acceleration of the bar are orthogonal to it.
Solution
We need to first determine the angular velocity of the bar
AB
, which we can do by relating the velocities of
the ends of the bar to one another and then use the constraint that the angular velocity is orthogonal to the bar
to make it unique. Relating the velocity of Ato that of B, we obtain
EvADEvBCE!AB ⇥ErA=B ;(1)
where, since the collar Ais constrained to move only in the xdirection, we have that
EvADvAO{:
In the position shown, the velocity of Bis
EvBDR!dO|;
and the position of Arelative to Bis
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2118 Solutions Manual
Writing that the angular velocity of bar AB must be orthogonal to the bar, we obtain the fourth equation as
E!AB ErA=B D0).` R/!ABx d!
ABy Ch!AB´ D0:
Solving these four equations for the four unknowns listed above, we obtain
!ABx DhR!d
d2Ch2C.`R/2;!
ABy DdhR!d
hd2Ch2C.`R/2i.` R/
;
!AB´ D
Rhd2C.`R/2i!d
hd2Ch2C.`R/2i.` R/
;v
ADdR!d
`R:
Finally, since the length of bar AB is LAB D2:5 m, we can find the length `using
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.








