
Dynamics 2e 2099
positive direction defined by a positive rotation of the angle
ˇ
. The collar
A
is constrained to rotate in the
direction OuD=C , so we can write it as
E!AD!AOuD=C D!A⇣cos ✓O|Csin ✓O
k⌘D0:9063!AO|C0:4226!AO
k: (6)
The direction of Oupin can be found by taking the cross product of ErB=A with OuC=D as
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2100 Solutions Manual
Problem 10.22
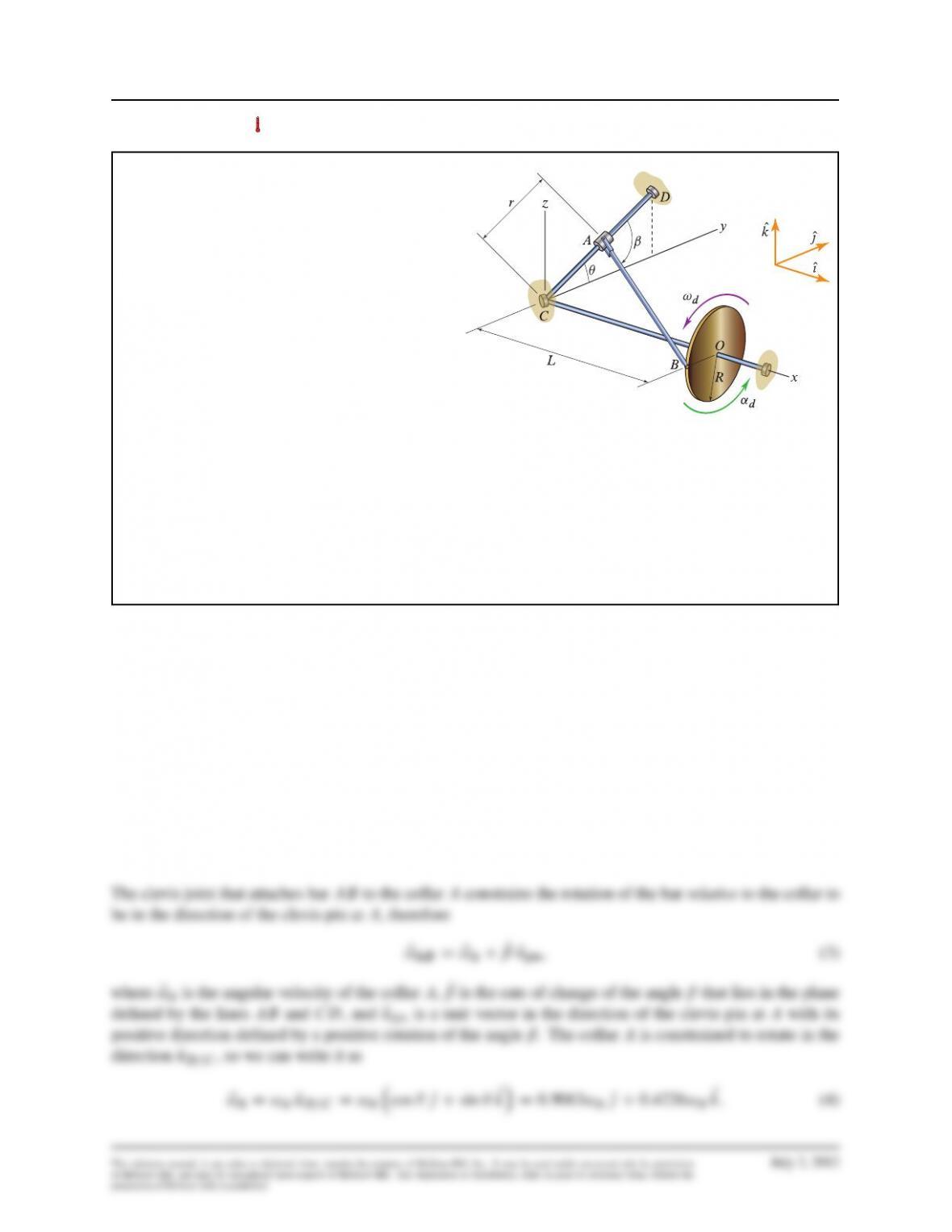
The mechanism consists of a disk of radius
R
that rotates with angular speed
!d
and angular
acceleration ˛dabout the xaxis in the directions
shown. Attached by a ball joint to the disk at
B
is the bar
AB
. End
A
of bar
AB
is attached by a
clevis joint to a collar that slides along the bar
CD
.
Bar
CD
lies in the
y´
plane and is inclined at the
angle
✓
with respect to the
y
axis. At the instant
shown, the point
B
lies in the
xy
plane. Use
RD0:2
m,
LD0:5
m,
rD0:3
m,
✓D25ı
, and
!dD30 rad=s
.Hint: The clevis joint constrains
the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the plane formed by bar
CD
and arm
AB
. Therefore, the angular velocity
of arm
AB
is the sum of the angular velocity of
the collar at
A
and the angular velocity associated
with the change in the angle ˇ.
Assuming that
˛dD15 rad=s2
at this instant,
determine the angular velocity and angular accel-
eration of the arm
AB
. Use the component system
shown.
Solution
Angular Velocity of AB.
We can find the angular velocity of the bar
AB
by relating the velocity of collar
Ato the velocity of the ball joint at Busing
EvADEvBCE!AB ⇥ErA=B ;(1)
where E!AB is the angular velocity of bar AB and the position of Arelative to Bcan be seen to be
ErA=B DErAErBDr⇣cos ✓O|Csin ✓O
k⌘.L O{RO|/ DLO{C.R Crcos ✓/O|Crsin ✓O
k
D⇣0:5 O{C0:4719 O|C0:1268 O
k⌘m:(2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2101
The direction of Oupin can be found by taking the cross product of ErB=A with OuC=D as
Oupin DErB=A ⇥OuC=D
ˇˇErB=A ⇥ErC=DˇˇD0:1667 O{C0:4167 O|0:8936 O
k; (5)
where
ErB=A DErA=B
, which is given in Eq. (
??
), and
OuC=D DOuD=C Dcos ✓O|sin ✓O
k
. The velocity
of Bis easily computed to be
EvBDR!dO
kD6O
km=s:(6)
We also know that the collar
A
is constrained to move along the bar
CD
and so we can write the velocity of
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2102 Solutions Manual
The direction of the acceleration of Ais known, so we can write it as
EaADaAOuD=C DaA⇣cos ✓O|Csin ✓O
k⌘D0:9063aAO|C0:4226aAO
k: (16)
Since Bis moving in a circle centered at O, its acceleration is easily found to be
EaBDR!2
dO|R˛dO
kD⇣180:0 O|3:000 O
k⌘rad=s2:(17)
Substituting (??), (??), (??), (??), and (??) into Eq. (??), we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2103
Problem 10.23
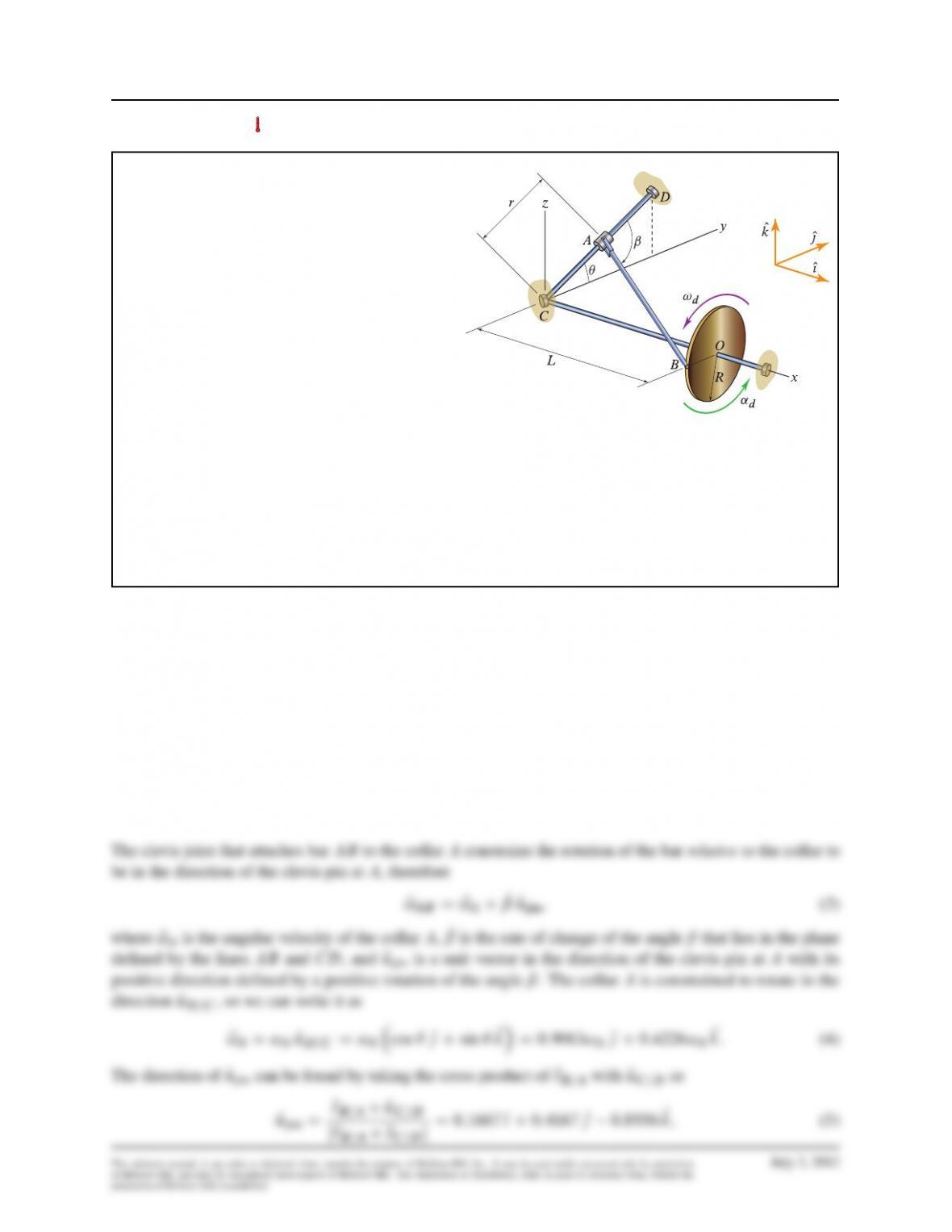
The mechanism consists of a disk of radius
R
that rotates with angular speed
!d
and angular
acceleration ˛dabout the xaxis in the directions
shown. Attached by a ball joint to the disk at
B
is the bar
AB
. End
A
of bar
AB
is attached by a
clevis joint to a collar that slides along the bar
CD
.
Bar
CD
lies in the
y´
plane and is inclined at the
angle
✓
with respect to the
y
axis. At the instant
shown, the point
B
lies in the
xy
plane. Use
RD0:2
m,
LD0:5
m,
rD0:3
m,
✓D25ı
, and
!dD30 rad=s
.Hint: The clevis joint constrains
the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the plane formed by bar
CD
and arm
AB
. Therefore, the angular velocity
of arm
AB
is the sum of the angular velocity of
the collar at
A
and the angular velocity associated
with the change in the angle ˇ.
Assuming that
˛dD0
at this instant, deter-
mine the acceleration of the collar at
A
. Use the
component system shown.
Solution
Velocity Analysis.
We can find the angular velocity of the bar
AB
, which we will need for the acceleration
analysis, by relating the velocity of collar Ato that of Busing
EvADEvBCE!AB ⇥ErA=B ;(1)
where E!AB is the angular velocity of bar AB and the position of Arelative to Bcan be seen to be
ErA=B DErAErBDr⇣cos ✓O|Csin ✓O
k⌘.L O{RO|/ DLO{C.R Crcos ✓/O|Crsin ✓O
k
D⇣0:5 O{C0:4719 O|C0:1268 O
k⌘m:(2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2104 Solutions Manual
where
ErB=A DErA=B
, which is given in Eq. (
??
), and
OuC=D DOuD=C Dcos ✓O|sin ✓O
k
. The velocity
of Bis easily computed to be
EvBDR!dO
kD6O
km=s:(6)
We also know that the collar
A
is constrained to move along the bar
CD
and so we can write the velocity of
Aas
EvADvAOuD=C DvA⇣cos ✓O|Csin ✓O
k⌘D0:9063vAO|C0:4226vAO
k: (7)
Substituting Eqs. (
??
) and (
??
) into Eq. (
??
) and then substituting Eqs. (
??
), (
??
), (
??
), and (
??
) into Eq. (
??
),
we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2105
from Eq. (
??
), we substituted in expressions found above for
OuD=C
,
Oupin
,
E!A
,
P
ˇ
, and
!A
. Substituting (
??
),
(??), (??), (??), and (??) into Eq. (??), we obtain
⇣0:9063 O|C0:4226 O
k⌘aAD⇣60:87 C0:4745 R
ˇ0:08452 P!A⌘O{
C⇣182:3 C0:4257 R
ˇ0:2113 P!A⌘O|C⇣9:014 C0:2870 R
ˇC0:4532 P!A⌘O
k; (18)
which is equivalent to the following three scalar equations
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2106 Solutions Manual
Problem 10.24
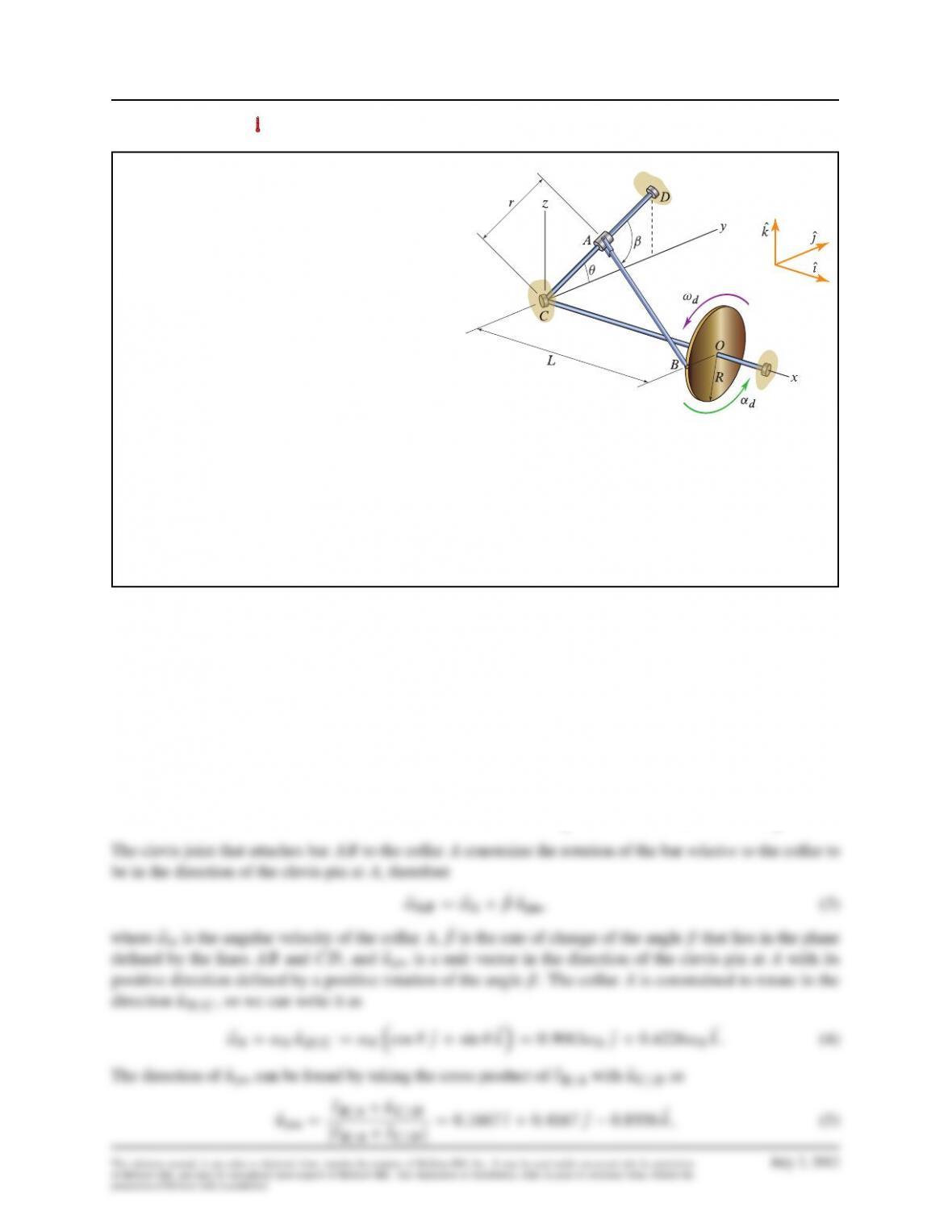
The mechanism consists of a disk of radius
R
that rotates with angular speed
!d
and angular
acceleration ˛dabout the xaxis in the directions
shown. Attached by a ball joint to the disk at
B
is the bar
AB
. End
A
of bar
AB
is attached by a
clevis joint to a collar that slides along the bar
CD
.
Bar
CD
lies in the
y´
plane and is inclined at the
angle
✓
with respect to the
y
axis. At the instant
shown, the point
B
lies in the
xy
plane. Use
RD0:2
m,
LD0:5
m,
rD0:3
m,
✓D25ı
, and
!dD30 rad=s
.Hint: The clevis joint constrains
the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the plane formed by bar
CD
and arm
AB
. Therefore, the angular velocity
of arm
AB
is the sum of the angular velocity of
the collar at
A
and the angular velocity associated
with the change in the angle ˇ.
Assuming that
˛dD15 rad=s2
at this instant,
determine the acceleration of the collar at
A
. Use
the component system shown.
Solution
Velocity Analysis.
We can find the angular velocity of the bar
AB
, which we will need for the acceleration
analysis, by relating the velocity of collar Ato that of Busing
EvADEvBCE!AB ⇥ErA=B ;(1)
where E!AB is the angular velocity of bar AB and the position of Arelative to Bcan be seen to be
ErA=B DErAErBDr⇣cos ✓O|Csin ✓O
k⌘.L O{RO|/ DLO{C.R Crcos ✓/O|Crsin ✓O
k
D⇣0:5 O{C0:4719 O|C0:1268 O
k⌘m:(2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2107
where
ErB=A DErA=B
, which is given in Eq. (
??
), and
OuC=D DOuD=C Dcos ✓O|sin ✓O
k
. The velocity
of Bis easily computed to be
EvBDR!dO
kD6O
km=s:(6)
We also know that the collar
A
is constrained to move along the bar
CD
and so we can write the velocity of
Aas
EvADvAOuD=C DvA⇣cos ✓O|Csin ✓O
k⌘D0:9063vAO|C0:4226vAO
k: (7)
Substituting Eqs. (
??
) and (
??
) into Eq. (
??
) and then substituting Eqs. (
??
), (
??
), (
??
), and (
??
) into Eq. (
??
),
we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2108 Solutions Manual
where, in Eq. (
??
), we have used the fact that
P
OuD=C DE
0
since its direction is constant and the fact that the
time derivative of
Oupin
is the angular velocity of
Oupin
crossed with
Oupin
, i.e.,
E!A⇥Oupin
. To obtain Eq. (
??
)
from Eq. (
??
), we substituted in expressions found above for
OuD=C
,
Oupin
,
E!A
,
P
ˇ
, and
!A
. Substituting (
??
),
(??), (??), (??), and (??) into Eq. (??), we obtain
⇣0:9063 O|C0:4226 O
k⌘aAD⇣60:87 C0:4745 R
ˇ0:08452 P!A⌘O{
C⇣182:3 C0:4257 R
ˇ0:2113 P!A⌘O|C⇣12:01 C0:2870 R
ˇC0:4532 P!A⌘O
k; (18)
which is equivalent to the following three scalar equations
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.