
Dynamics 2e 2089
0:9063vAD0:5917!ABx 3:000!AB´;(8)
0:4226vAD2:269!ABx C3:000!ABy 20:00: (9)
These three equations contain four unknowns, that is
!ABx
,
!ABy
,
!AB´
, and
vA
. Fortunately, there is one
thing that we have not taken into account—any rotation of the bar
AB
about its own axis does not affect the
motion of either point
A
or point
B
, so that component of angular velocity is arbitrary as far as Eq. (
??
) is
concerned. Therefore, we can arbitrarily set that component to zero to obtain the fourth equation
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2090 Solutions Manual
0:4226aAD13:86 C2:269˛ABx C3:000˛ABy :(21)
Similarly to the velocity analysis, these are three equations containing four unknowns:
aA
,
˛ABx
,
˛ABy
, and
˛AB´. As we saw in the velocity analysis, any component of E˛in the direction OuA=B does not play a role in
Eq. (
??
), which is the equation we are using to analyze the acceleration. Again, we can arbitrarily set that
component to zero to obtain the fourth equation
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2091
Problem 10.18
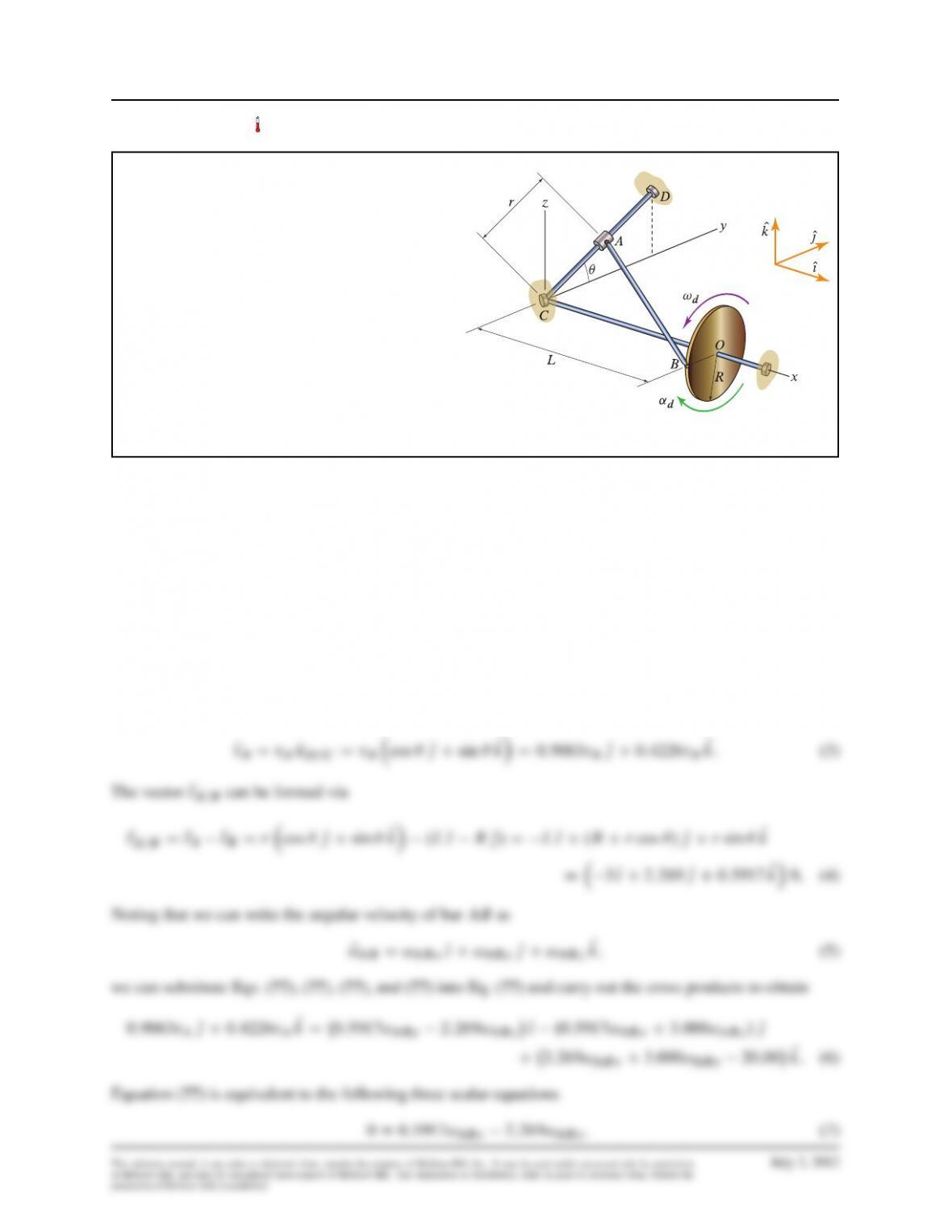
The mechanism consists of a disk of radius
R
that rotates with angular speed
!d
and angular
acceleration ˛dabout the xaxis in the directions
shown. Attached by a ball joint to the disk at
B
is the bar
AB
. End
A
of bar
AB
is attached by
a ball joint to a collar that slides along the bar
CD
. Bar
CD
lies in the
y´
plane and is inclined
at the angle
✓
with respect to the
y
axis. At the
instant shown, the point
B
lies in the
xy
plane.
Use
RD1ft
,
LD3ft
,
rD1:4 ft
,
✓D25ı
, and
!dD20 rad=s.
Assuming that
˛dD35 rad=s2
at this instant,
determine the angular acceleration of the bar
AB
,
as well as the acceleration of the slider A.
Solution
We begin with the velocity analysis to find the angular velocity of the bar
AB
, which will be needed for the
acceleration analysis. At this instant, in terms of the given component system, the velocity of point
B
can be
written as
EvBDR!dO
kD20 O
krad=s:(1)
Applying Eq. (10.1) to points Aand B, we obtain
EvADEvBCE!AB ⇥ErA=B ;(2)
where
E!AB
is the angular velocity of the bar
AB
. Since point
A
is constrained by the collar to move along
bar CD, we can write EvAas
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2092 Solutions Manual
0:9063vAD0:5917!ABx 3:000!AB´;(8)
0:4226vAD2:269!ABx C3:000!ABy 20:00: (9)
These three equations have four unknowns, that is
!ABx
,
!ABy
,
!AB´
, and
vA
. Fortunately, there is one
thing that we have not taken into account—any rotation of the bar
AB
about its own axis does not affect the
motion of either point
A
or point
B
, so that component of angular velocity is really arbitrary as far as Eq. (
??
)
is concerned. Therefore, we can arbitrarily set that component to zero to obtain the fourth equation
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2093
0:4226aAD21:14 C2:269˛ABx C3:000˛ABy :(21)
Similarly to the velocity analysis, these are three equations in four unknowns:
aA
,
˛ABx
,
˛ABy
, and
˛AB´
.
As we saw in the velocity analysis, any component of
E˛
in the direction
OuA=B
does not play a role in Eq. (
??
),
which is the equation we are using to analyze the acceleration. Again, we can arbitrarily set that component
to zero to obtain the fourth equation
E˛AB OuA=B D0)⇣˛ABx O{C˛ABy O|C˛AB´ O
k⌘ErAErB
jErAErBjD0; (22)
or, substituting in for ErAErBfrom Eq. (??), we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2094 Solutions Manual
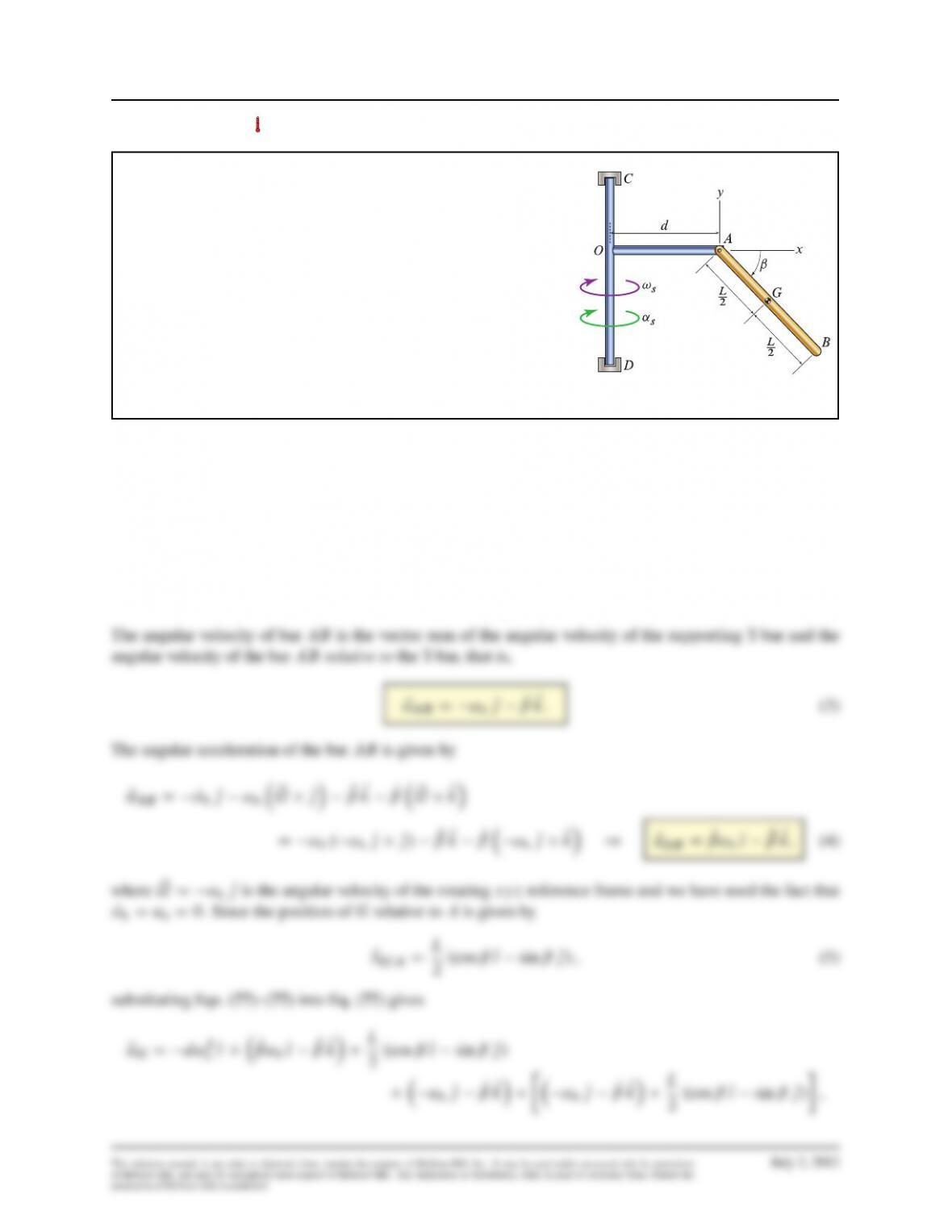
Problem 10.19
The T-bar support structure is mounted in bearings at
C
and
D
and spins with angular velocity
E!s
and angular acceleration
E˛s
in the directions shown. Bar
AB
of length
L
is pinned at
A
to
the T-bar support, and its position in the vertical plane is defined
by the variable angle
ˇ
. As we will see in the next section, the
Newton-Euler equations for the bar will require that we know the
acceleration of
G
, the angular velocity of the bar
AB
, and the
angular acceleration of the bar
AB
relative to the primary frame
XYZ
, which is assumed to be inertial. Express your answers in
the
xy´
frame shown, which is attached to the T-bar support at
A
.
Treat dand Las known.
Find expressions for
EaG
,
E!AB
, and
E˛AB
assuming that
˛sD0
.
Solution
The acceleration of Gcan be found by relating it to the acceleration of Ausing
EaGDEaACE˛AB ⇥ErG=A CE!AB ⇥E!AB ⇥ErG=A;(1)
where
E!AB
is the angular velocity of the bar
AB
and
E˛AB
is its angular acceleration. Since
˛sD0
, the
acceleration of Ais readily seen to be
EaADd!2
sO{: (2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2096 Solutions Manual
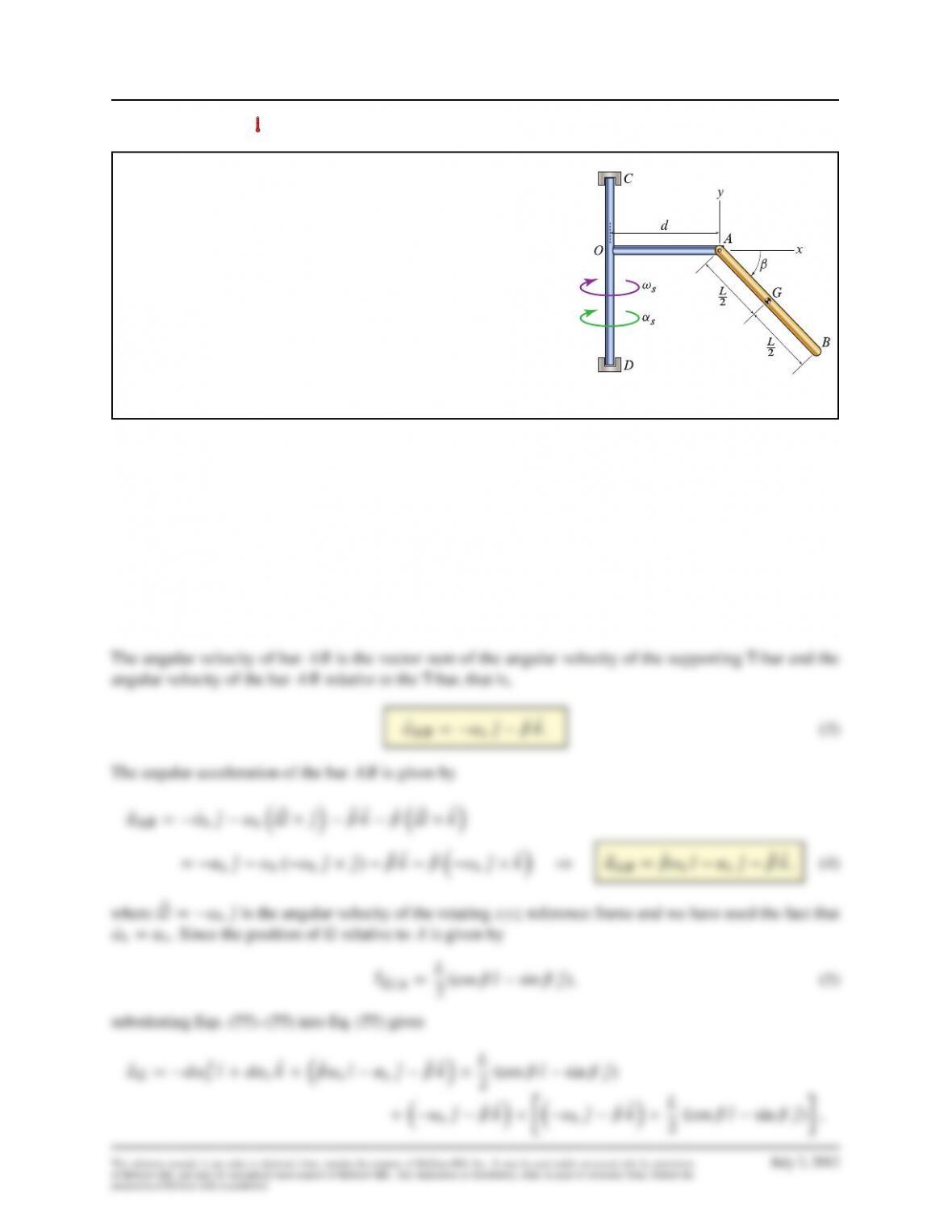
Problem 10.20
The T-bar support structure is mounted in bearings at
C
and
D
and spins with angular velocity
E!s
and angular acceleration
E˛s
in the directions shown. Bar
AB
of length
L
is pinned at
A
to
the T-bar support, and its position in the vertical plane is defined
by the variable angle
ˇ
. As we will see in the next section, the
Newton-Euler equations for the bar will require that we know the
acceleration of
G
, the angular velocity of the bar
AB
, and the
angular acceleration of the bar
AB
relative to the primary frame
XYZ
, which is assumed to be inertial. Express your answers in
the
xy´
frame shown, which is attached to the T-bar support at
A
.
Treat dand Las known.
Find expressions for
EaG
,
E!AB
, and
E˛AB
assuming that
˛s¤0
.
Solution
The acceleration of Gcan be found by relating it to the acceleration of Ausing
EaGDEaACE˛AB ⇥ErG=A CE!AB ⇥E!AB ⇥ErG=A;(1)
where
E!AB
is the angular velocity of the bar
AB
and
E˛AB
is its angular acceleration. Since
˛s¤0
, the
acceleration of Ais readily seen to be
EaADd!2
sO{Cd˛sO
k: (2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2098 Solutions Manual
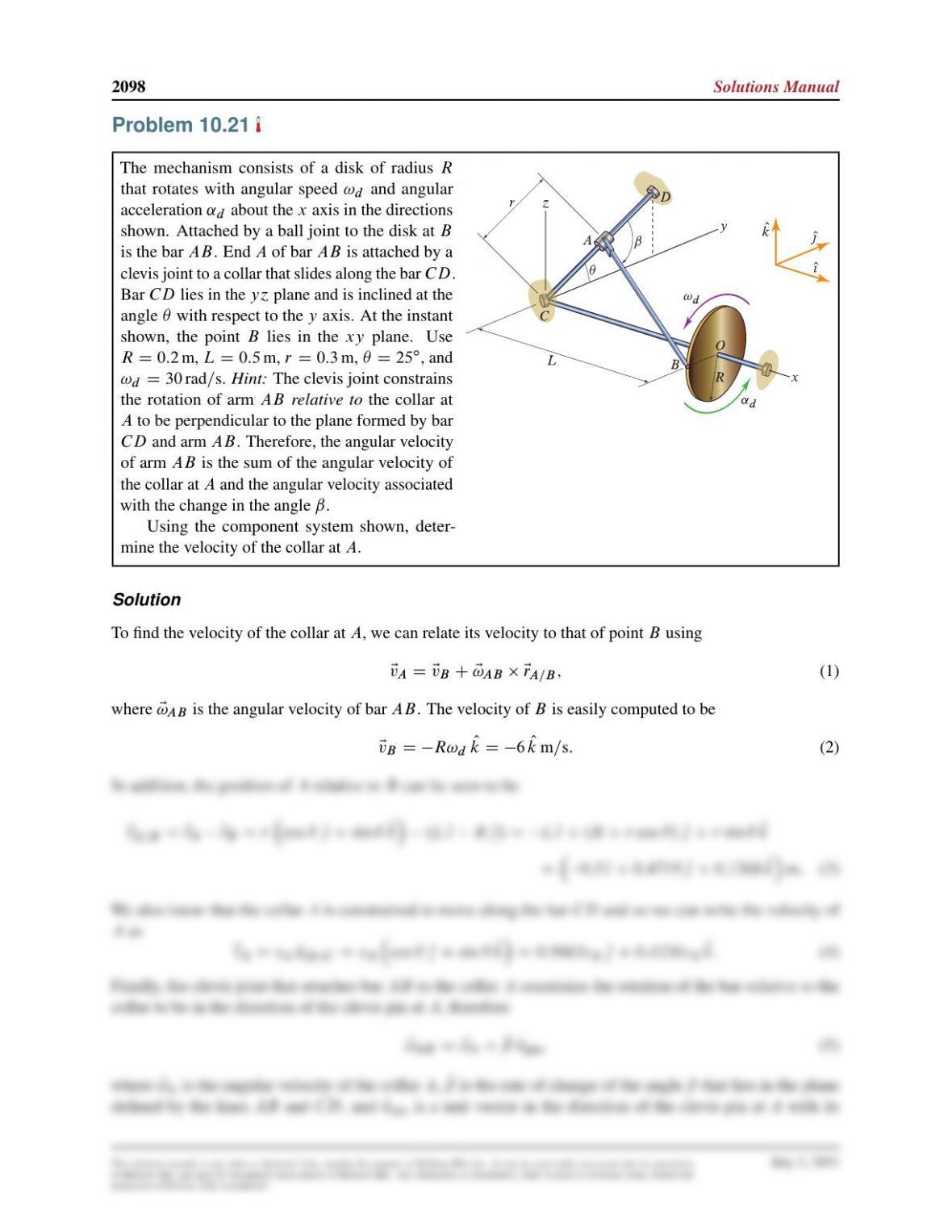
Problem 10.21
The mechanism consists of a disk of radius
R
that rotates with angular speed
!d
and angular
acceleration ˛dabout the xaxis in the directions
shown. Attached by a ball joint to the disk at
B
is the bar
AB
. End
A
of bar
AB
is attached by a
clevis joint to a collar that slides along the bar
CD
.
Bar
CD
lies in the
y´
plane and is inclined at the
angle
✓
with respect to the
y
axis. At the instant
shown, the point
B
lies in the
xy
plane. Use
RD0:2
m,
LD0:5
m,
rD0:3
m,
✓D25ı
, and
!dD30 rad=s
.Hint: The clevis joint constrains
the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the plane formed by bar
CD
and arm
AB
. Therefore, the angular velocity
of arm
AB
is the sum of the angular velocity of
the collar at
A
and the angular velocity associated
with the change in the angle ˇ.
Using the component system shown, deter–
mine the velocity of the collar at A.
Solution
To find the velocity of the collar at A, we can relate its velocity to that of point Busing
EvADEvBCE!AB ⇥ErA=B ;(1)
where E!AB is the angular velocity of bar AB. The velocity of Bis easily computed to be
EvBDR!dO
kD6O
km=s:(2)
In addition, the position of Arelative to Bcan be seen to be