
Dynamics 2e 2079
D⇣R
``P
✓2⌘⇣cos ✓O{Csin ✓O
k⌘C⇣`R
✓C2P
`P
✓⌘⇣sin ✓O{Ccos ✓O
k⌘
Dh⇣R
``P
✓2⌘cos ✓C⇣`R
✓C2P
`P
✓⌘sin ✓iO{
Ch⇣R
``P
✓2⌘sin ✓C⇣`R
✓C2P
`P
✓⌘cos ✓iO
k;
Substituting everything into the expression for EaB, we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2080 Solutions Manual
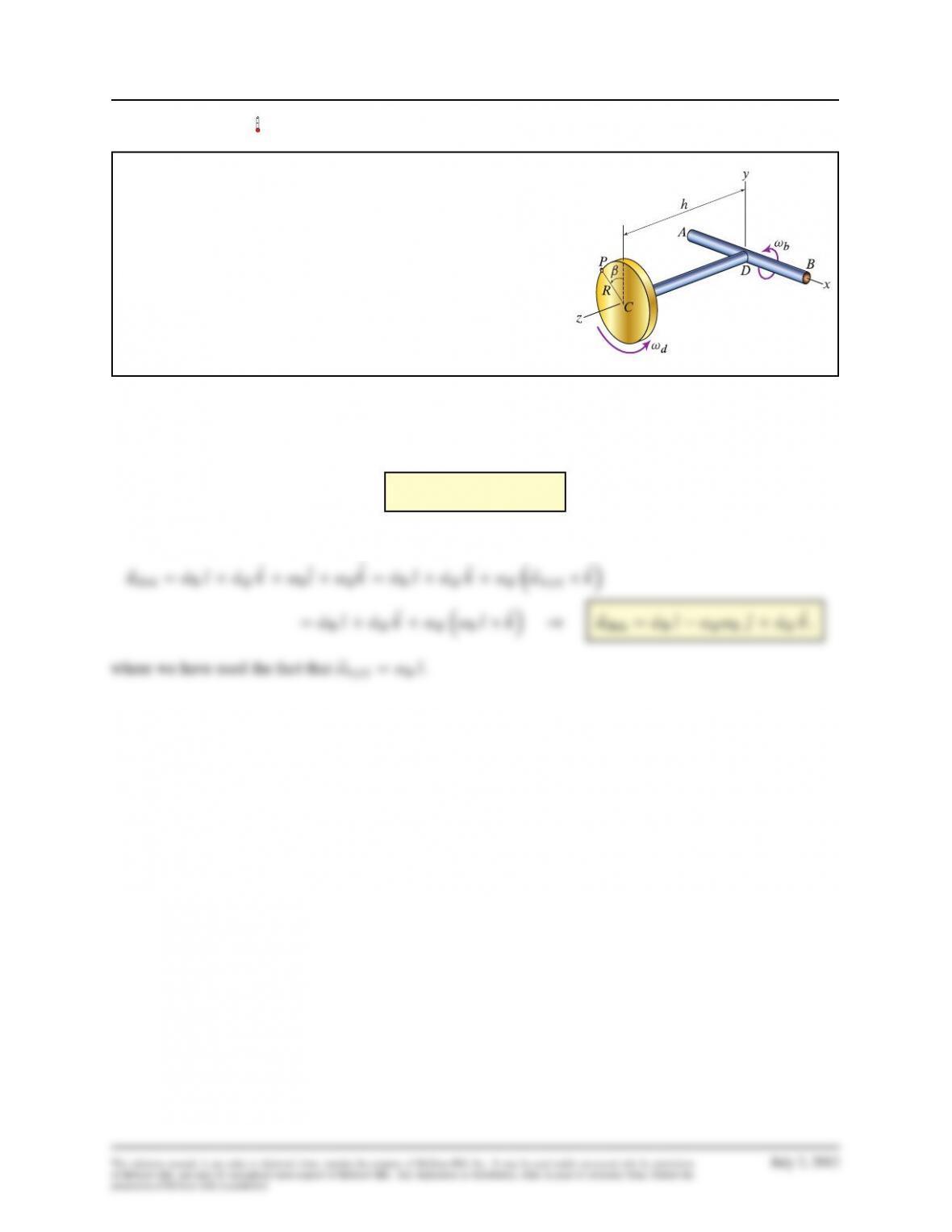
Problem 10.12
The bar
AB
rotates at the rate
!b
about the fixed
x
axis as shown.
The bar
CD
is attached perpendicularly to
AB
to form a T-bar.
The disk of radius
R
centered at
C
rotates at the rate
!d
relative to
the arm
CD
in the direction shown. Assume that the
xy´
reference
frame is attached to the T-bar and that its origin is at
D
. In addition,
assume that the angular rates
!b
and
!d
are not constant. Treat
h
and Ras known.
Determine expressions for the angular velocity and angular
acceleration of the disk at C. Express your answer in the rotating
xy´ reference frame.
Solution
Since the angular speed
!d
is relative to the T-bar, we can immediately write the angular velocity of the disk
as
E!disk D!bO{C!dO
k:
For the angular acceleration, we simply differentiate the angular velocity to obtain
O
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2081
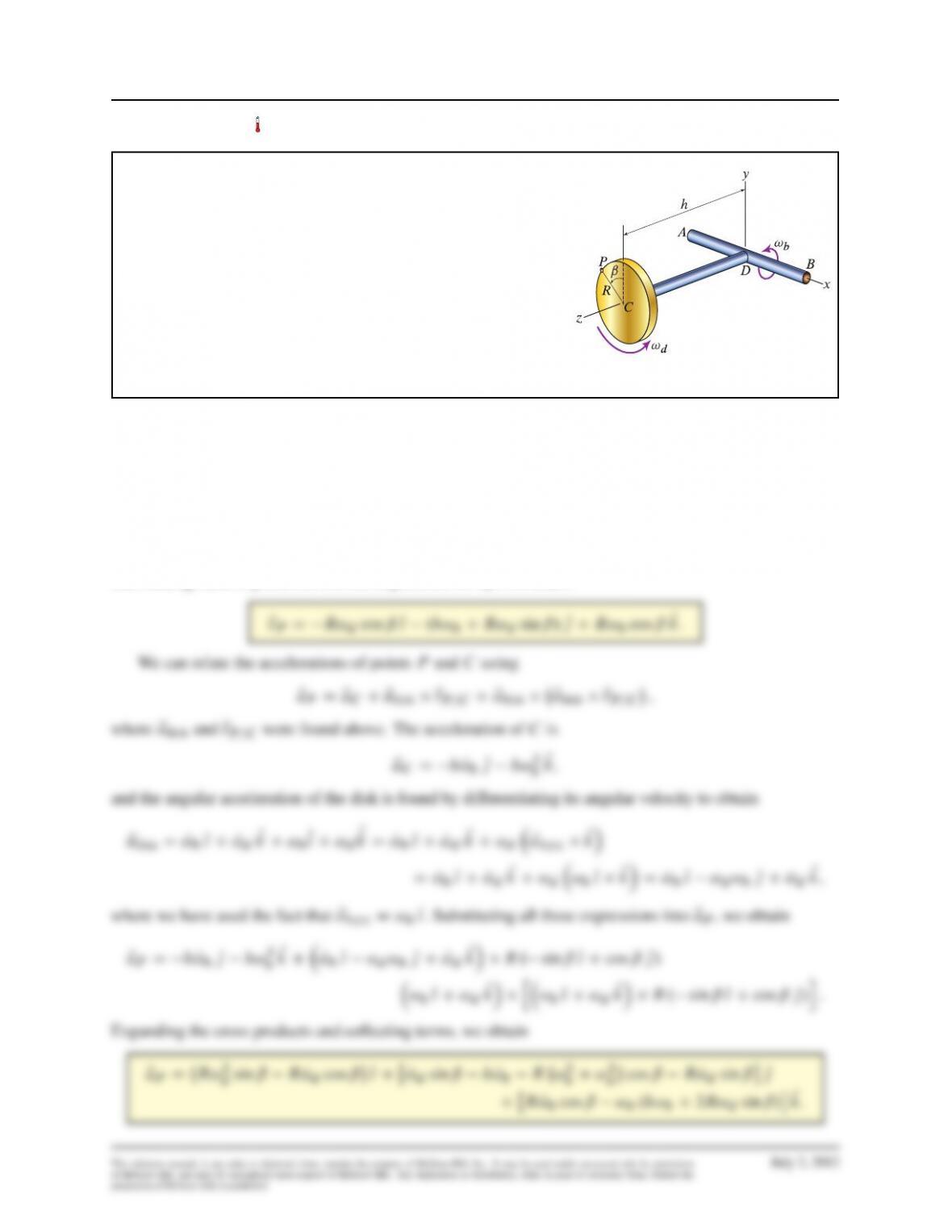
Problem 10.13
The bar
AB
rotates at the rate
!b
about the fixed
x
axis as shown.
The bar
CD
is attached perpendicularly to
AB
to form a T-bar.
The disk of radius
R
centered at
C
rotates at the rate
!d
relative to
the arm
CD
in the direction shown. Assume that the
xy´
reference
frame is attached to the T-bar and that its origin is at
D
. In addition,
assume that the angular rates
!b
and
!d
are not constant. Treat
h
and Ras known.
Determine expressions for the velocity and acceleration of the
point
P
, which lies at the edge of the disk at an arbitrary angle
ˇ
with respect to the
y
axis. Express your answer in the rotating
xy´ reference frame.
Solution
Points Pand Care both on the disk, so we can relate the velocities using
EvPDEvCCE!disk ⇥ErP=C;
where
EvCDh!bO|; E!disk D!bO{C!dO
k; and ErP=C DR.sin ˇO{Ccos ˇO|/:
Substituting these expressions into the expression for EvP, we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2082 Solutions Manual
Problem 10.14
The cone rolls without slipping over the
x´
plane and around the
y
axis with angular speed
!0
and angular acceleration
˛0
in the
directions shown. At the instant shown, the line
BC
is parallel to
the surface on which the cone is rolling and the line
AD
lies on
the base of the cone and is perpendicular to the line
BC
. Treat
L
and ˇas known.
Using the component system shown, determine expressions
for the angular velocity
E!c
and angular acceleration
E˛c
of the
cone.
Solution
Referring to the figure at the right, point
E
is at the center
of the circular base of the cone. The
xy´
reference frame

Dynamics 2e 2083
To find the angular acceleration of the cone, we apply Eq. (10.6) to obtain‡
P
E!cDE˛cDP!cx O{CP!cy O|CP!c´ O
kCE
˝⇥E!c;(2)
where
E
˝
is the angular velocity of the rotating reference frame. First finding the time derivatives of the
components, we obtain
cos ˇ
cos ˇ
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2084 Solutions Manual
Problem 10.15
The cone rolls without slipping over the
x´
plane and around the
y
axis with angular speed
!0
and angular acceleration
˛0
in the
directions shown. At the instant shown, the line
BC
is parallel to
the surface on which the cone is rolling and the line
AD
lies on
the base of the cone and is perpendicular to the line
BC
. Treat
L
and ˇas known.
Using the component system shown, determine expressions
for the velocity and acceleration of point Aat this instant.
Solution
Referring to the figure at the right, point
E
is at the center
of the circular base of the cone. The
xy´
reference frame
rotates with angular velocity
!0
and angular acceleration
˛0
in the directions indicated and the cone rotates relative to the
xy´
frame at
P
. Once we determine the angular velocity and
angular acceleration of the cone, we can easily determine
the velocity and acceleration of point A.
We begin by noting that the point
O
must have zero
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2085
To find the angular acceleration of the cone, we apply Eq. (10.6) to obtain§
P
E!cDE˛cDP!cx O{CP!cy O|CP!c´ O
kCE
˝⇥E!c;(4)
where
E
˝
is the angular velocity of the rotating reference frame. First finding the time derivatives of the
components, we obtain
cos ˇ
cos ˇ
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2086 Solutions Manual
Problem 10.16
The cone rolls without slipping over the
x´
plane and around the
y
axis with angular speed
!0
and angular acceleration
˛0
in the
directions shown. At the instant shown, the line
BC
is parallel to
the surface on which the cone is rolling and the line
AD
lies on
the base of the cone and is perpendicular to the line
BC
. Treat
L
and ˇas known.
Using the component system shown, determine expressions
for the velocity and acceleration of point Bat this instant.
Solution
Referring to the figure at the right, point
E
is at the center
of the circular base of the cone. The
xy´
reference frame
rotates with angular velocity
!0
and angular acceleration
˛0
in the directions indicated and the cone rotates relative to the
xy´
frame at
P
. Once we determine the angular velocity and
angular acceleration of the cone, we can easily determine
the velocity and acceleration of point B.
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2087
To find the angular acceleration of the cone, we apply Eq. (10.6) to obtain¶
P
E!cDE˛cDP!cx O{CP!cy O|CP!c´ O
kCE
˝⇥E!c;(4)
where
E
˝
is the angular velocity of the rotating reference frame. First finding the time derivatives of the
components, we obtain
cos ˇ
cos ˇ
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2088 Solutions Manual
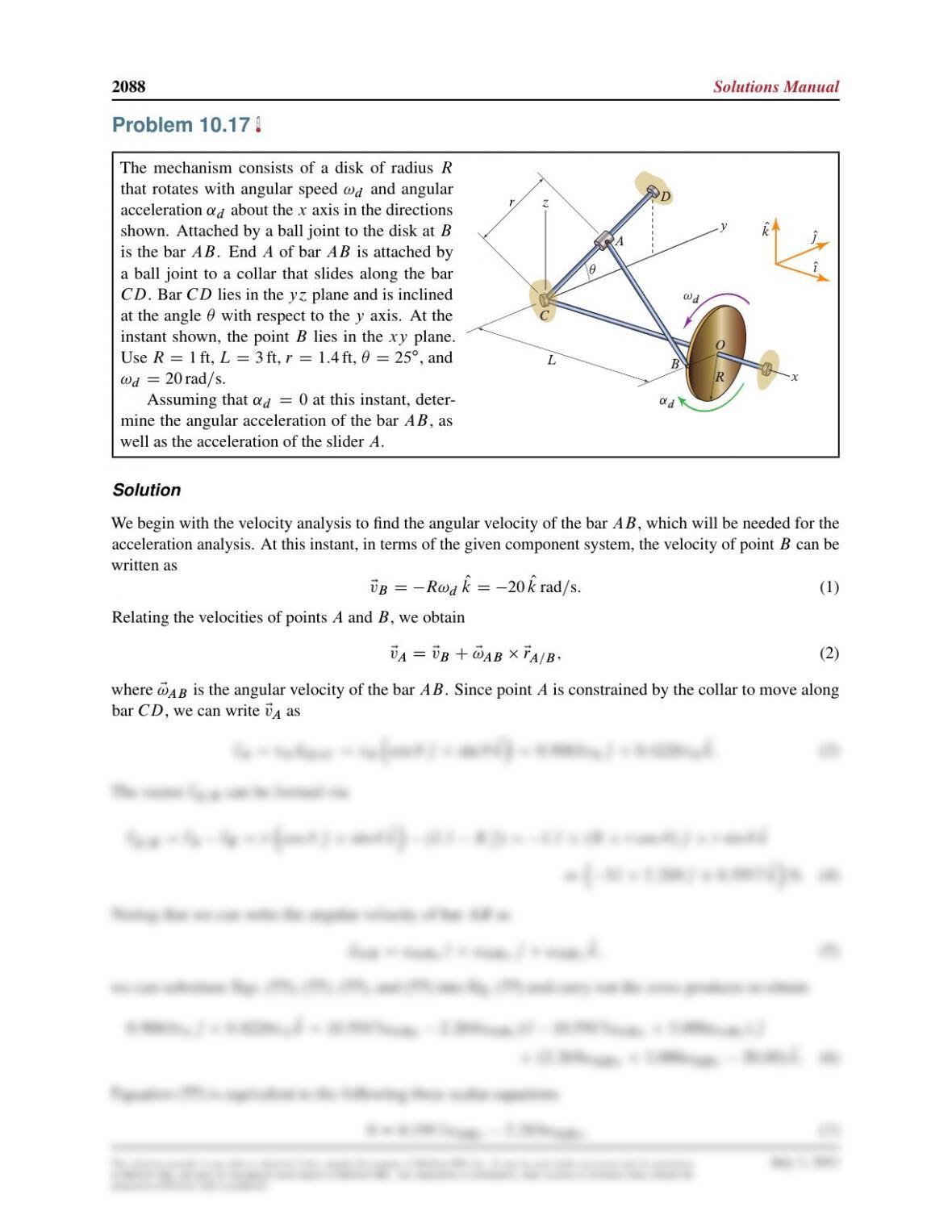
Problem 10.17
The mechanism consists of a disk of radius
R
that rotates with angular speed
!d
and angular
acceleration ˛dabout the xaxis in the directions
shown. Attached by a ball joint to the disk at
B
is the bar
AB
. End
A
of bar
AB
is attached by
a ball joint to a collar that slides along the bar
CD
. Bar
CD
lies in the
y´
plane and is inclined
at the angle
✓
with respect to the
y
axis. At the
instant shown, the point
B
lies in the
xy
plane.
Use
RD1ft
,
LD3ft
,
rD1:4 ft
,
✓D25ı
, and
!dD20 rad=s.
Assuming that
˛dD0
at this instant, deter–
mine the angular acceleration of the bar
AB
, as
well as the acceleration of the slider A.
Solution
We begin with the velocity analysis to find the angular velocity of the bar
AB
, which will be needed for the
acceleration analysis. At this instant, in terms of the given component system, the velocity of point
B
can be
written as
EvBDR!dO
kD20 O
krad=s:(1)
Relating the velocities of points Aand B, we obtain
EvADEvBCE!AB ⇥ErA=B ;(2)
where
E!AB
is the angular velocity of the bar
AB
. Since point
A
is constrained by the collar to move along
bar CD, we can write EvAas
EvADvAOuD=C DvA⇣cos ✓O|Csin ✓O
k⌘D0:9063vAO|C0:4226vAO
k: (3)