Dynamics 2e 2069
Problem 10.7
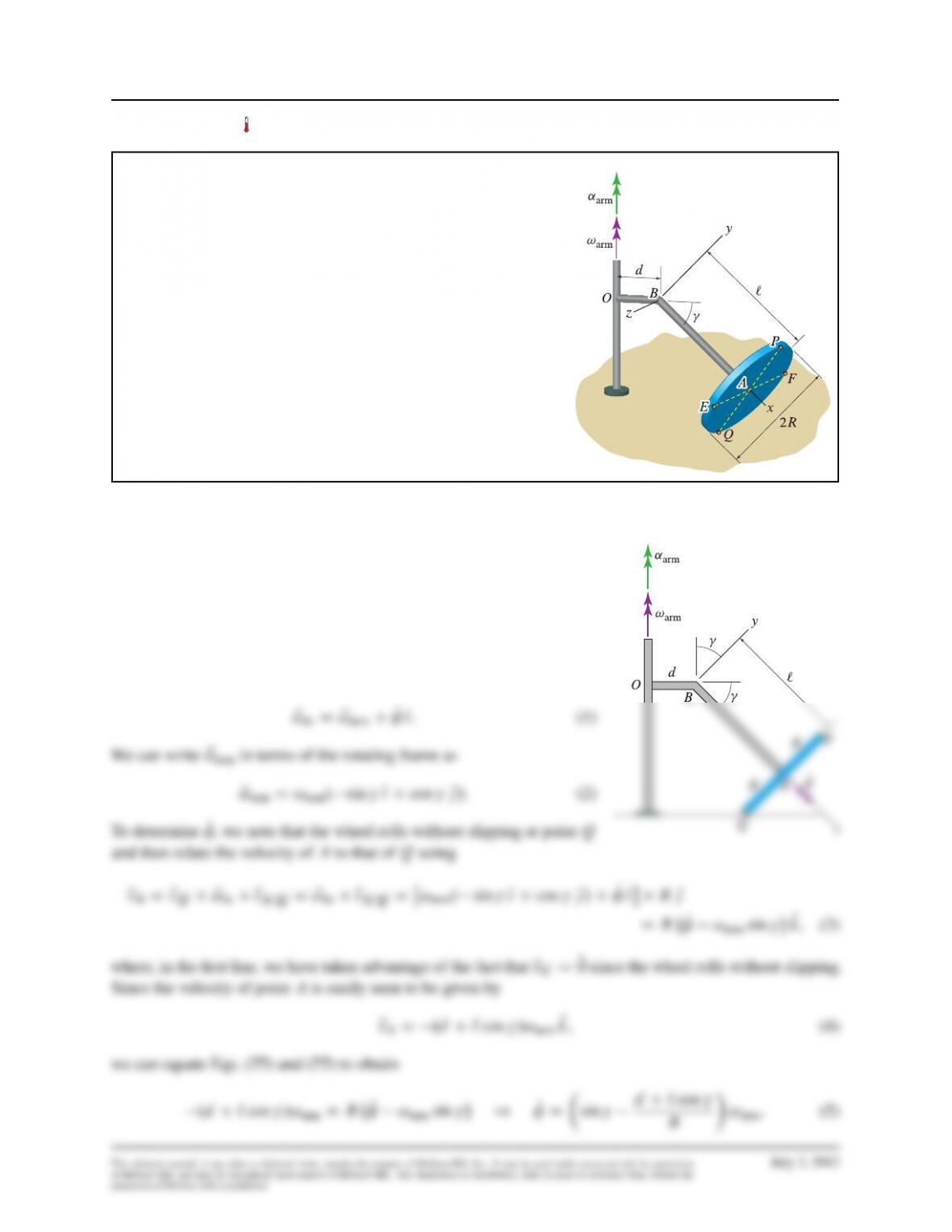
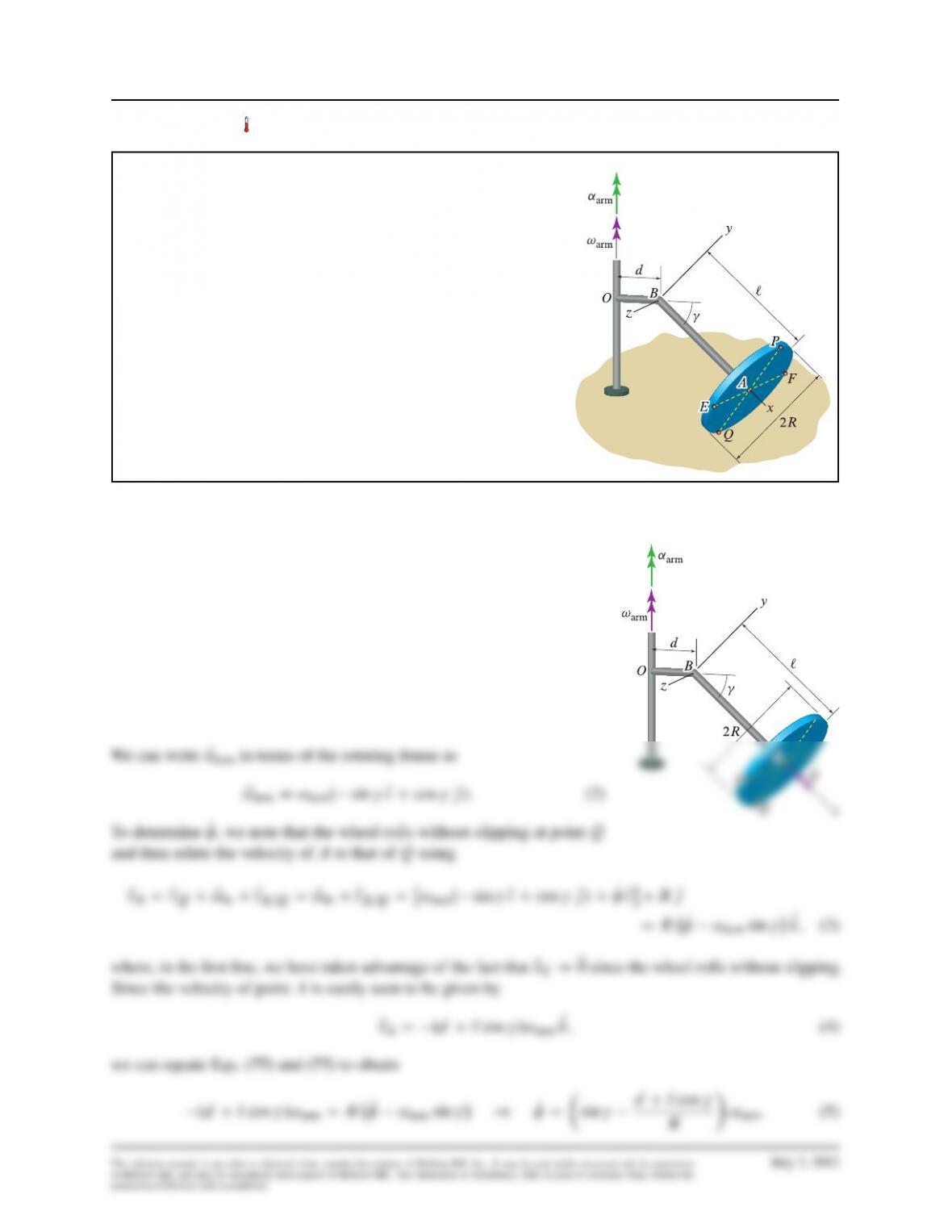
The bent arm rotates with angular speed
!arm
and angular accel-
eration
˛arm
in the directions shown. The wheel of radius
R
with
center at
A
rotates relative to the bent arm as it rolls without slip-
ping over the stationary horizontal surface. At the instant shown,
the line
PQ
is perpendicular to the line
EF
, which is parallel to
the horizontal surface (i.e., the line
PQ
lies in the
xy
plane). Ex-
press your answers using the
xy´
reference frame that is attached
to the arm OBA. Treat d,`,R, and as known.
Assuming that
˛arm ¤0
at the instant shown, determine ex-
pressions for the velocity and acceleration of point P.
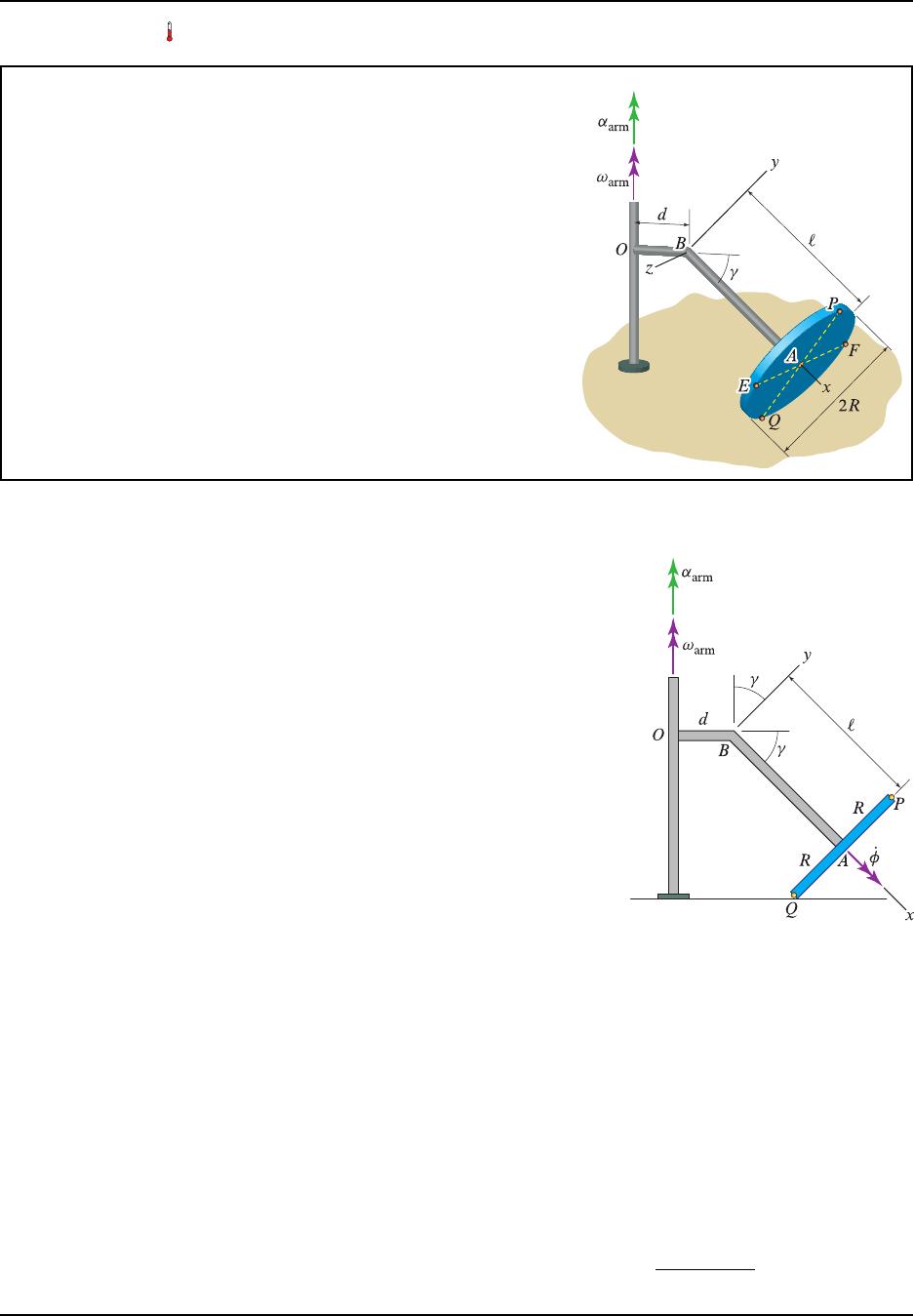
Solution
To find the motion of point
P
, we will first need to determine the angular
velocity and angular acceleration of the wheel in terms of given quantities.
The key kinematic constraints in this problem are that: (i) point
A
moves
in a circle centered on the axis of rotation of
!arm
with constant angular
velocity !arm and (ii) the wheel rolls without slipping at point Q.
If we let
P
be the angular speed of the wheel relative to the bent arm,
then the angular velocity of the wheel can be written as

2070 Solutions Manual
Substituting Eqs. (??) and (??) into Eq. (??), we obtain the angular velocity of the wheel as
E!wD!arm.sin O{Ccos O|/C✓sin dC`cos
R◆!arm O{D!arm ✓dC`cos
RO{Ccos O|◆:
We can now find the velocity of point
P
by relating it to the velocity of
A
, which we already have from
Eq. (??), that is

Dynamics 2e 2071
D!2
arm.d C`cos /.cos O{Csin O|/.d C`cos /˛arm O
k:
Finally, the acceleration of Pbecomes
2072 Solutions Manual
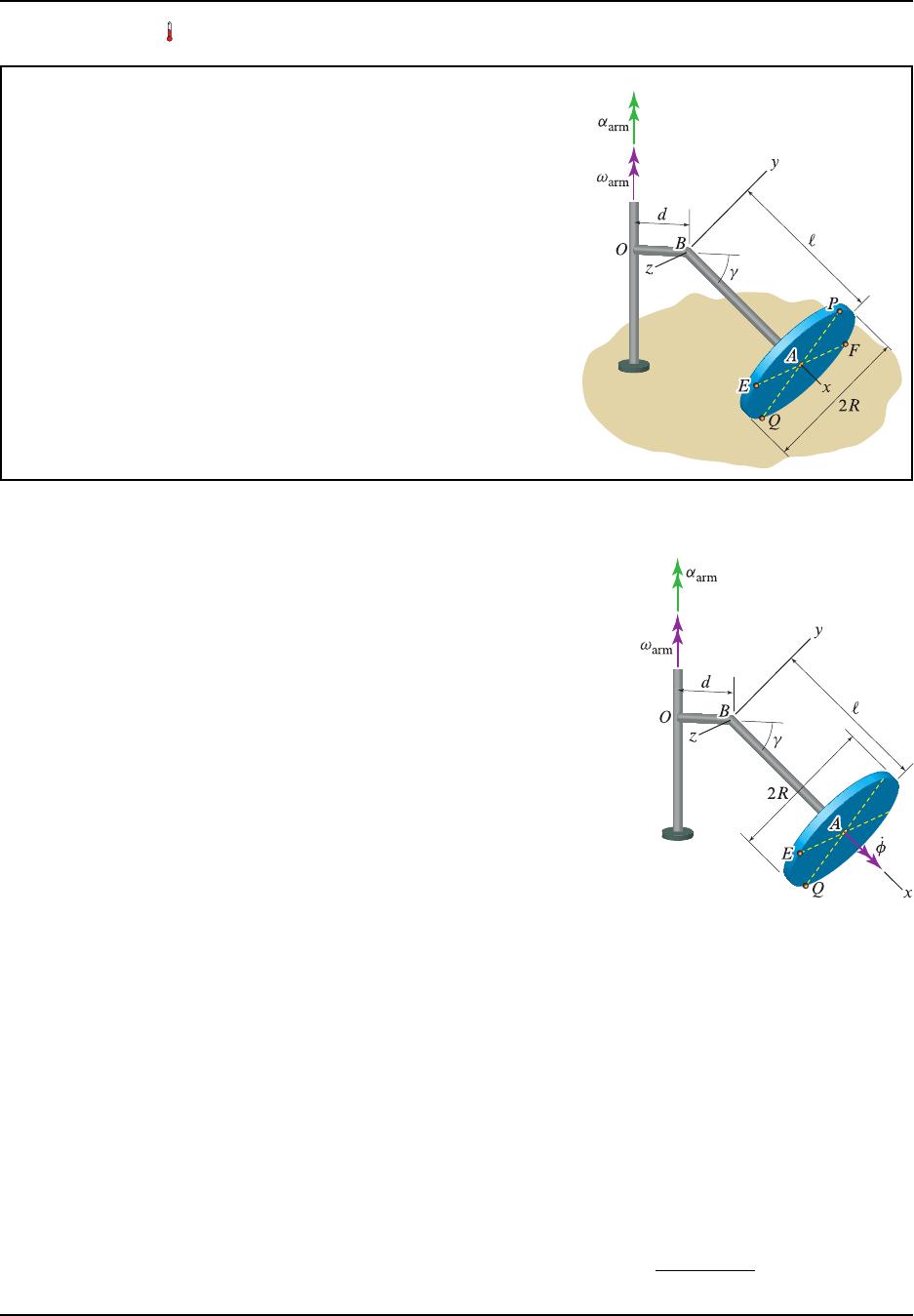
Problem 10.8
The bent arm rotates with angular speed
!arm
and angular accel-
eration
˛arm
in the directions shown. The wheel of radius
R
with
center at
A
rotates relative to the bent arm as it rolls without slip-
ping over the stationary horizontal surface. At the instant shown,
the line
PQ
is perpendicular to the line
EF
, which is parallel to
the horizontal surface (i.e., the line
PQ
lies in the
xy
plane). Ex-
press your answers using the
xy´
reference frame that is attached
to the arm OBA. Treat d,`,R, and as known.
Assuming that
˛arm ¤0
at the instant shown, determine ex-
pressions for the velocity and acceleration of point E.
Solution
To find the motion of point
E
, we will first need to determine the angular
velocity and angular acceleration of the wheel in terms of given quantities.
The key kinematic constraints in this problem are that: (i) point
A
moves
in a circle centered on the axis of rotation of
!arm
with constant angular
velocity !arm and (ii) the wheel rolls without slipping at point Q.
If we let
P
be the angular speed of the wheel relative to the bent arm,
then the angular velocity of the wheel can be written as
E!wDE!arm CP
O{: (1)

Dynamics 2e 2073
Substituting Eqs. (??) and (??) into Eq. (??), we obtain the angular velocity of the wheel as
E!wD!arm.sin O{Ccos O|/C✓sin dC`cos
R◆!arm O{D!arm ✓dC`cos
RO{Ccos O|◆:
We can now find the velocity of point
E
by relating it to the velocity of
A
, which we already have from
Eq. (??), that is

2074 Solutions Manual
C!arm.sin O{Ccos O|/⇥n!arm.sin O{Ccos O|/⇥⇥d.cos O{Csin O|/ C`O{⇤o
D!2
arm.d C`cos /.cos O{Csin O|/.d C`cos /˛arm O
k:
Dynamics 2e 2075
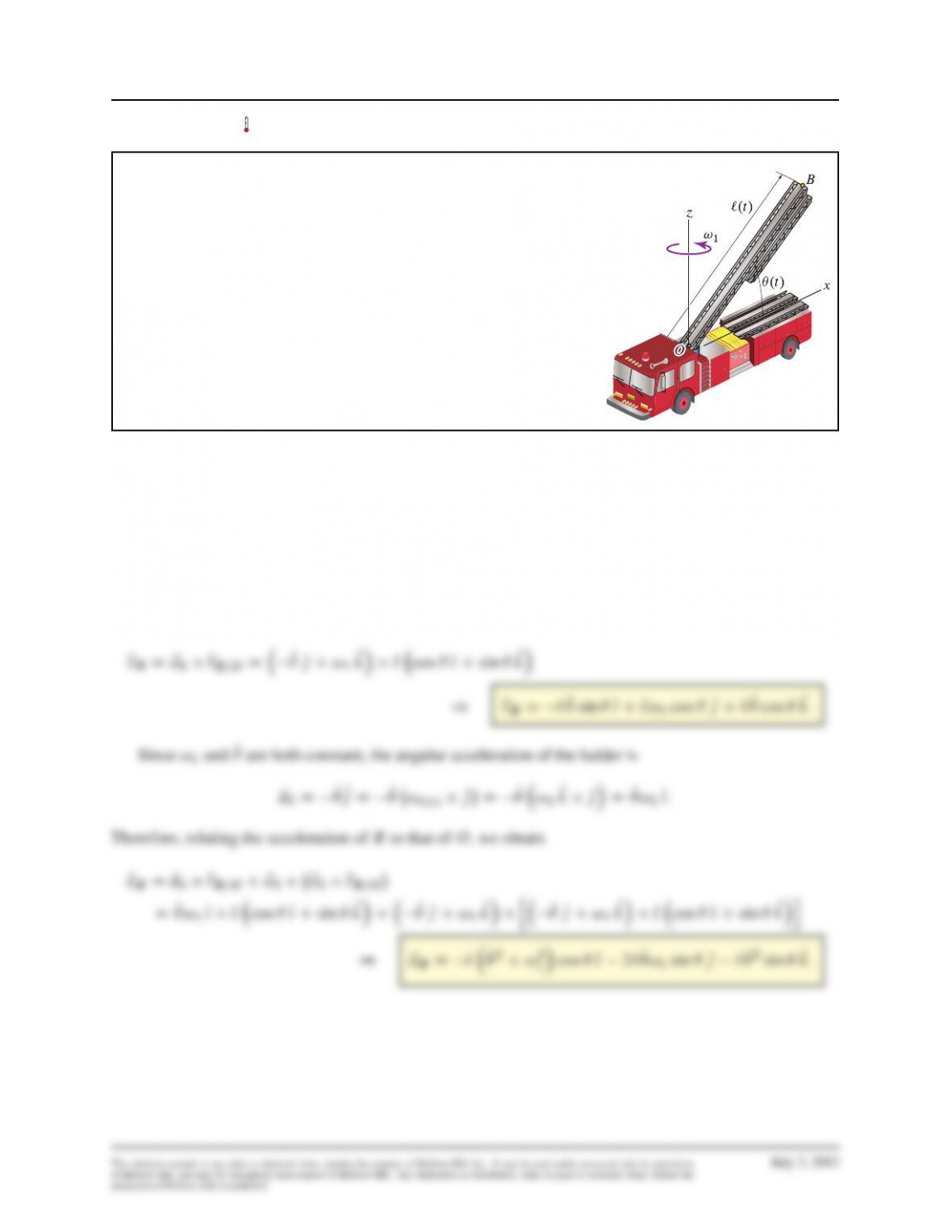
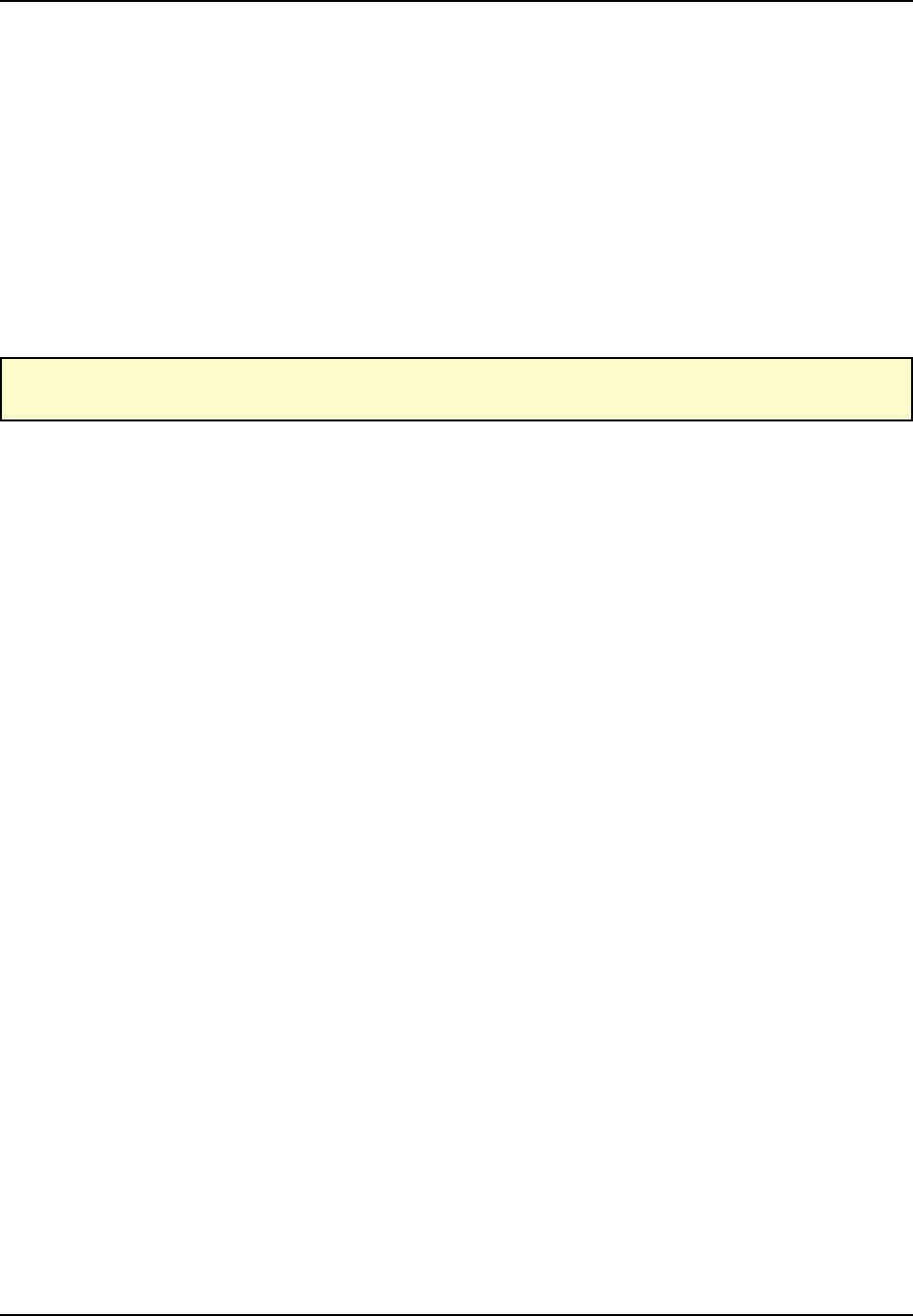
Problem 10.9
The fire truck ladder can rotate about the vertical
´
axis at known
rate
!1.t/
, elevate about the horizontal
x
axis at known rate
P
✓.t/
, and
the ladder can change its length (moving the bucket at
B
outward or
inward) with known rate P
`.t/.
If
!1
and
P
✓
are constant and
P
`D0
, determine expressions for the
velocity and acceleration of the bucket at
B
as functions of the elevation
angle ✓. Express your answer in the given rotating xy´ frame.
Solution
If
P
`D0
, then points
O
and
B
are two points on a rigid body that is the ladder. Using the given component
system, we can then write the angular velocity of the ladder as
E!`DP
✓O|C!1O
k;
where the
xy´
frame rotates with
!1
. We can then find the velocity of
B
by relating it to the velocity of
O
,
which is zero, using
2076 Solutions Manual
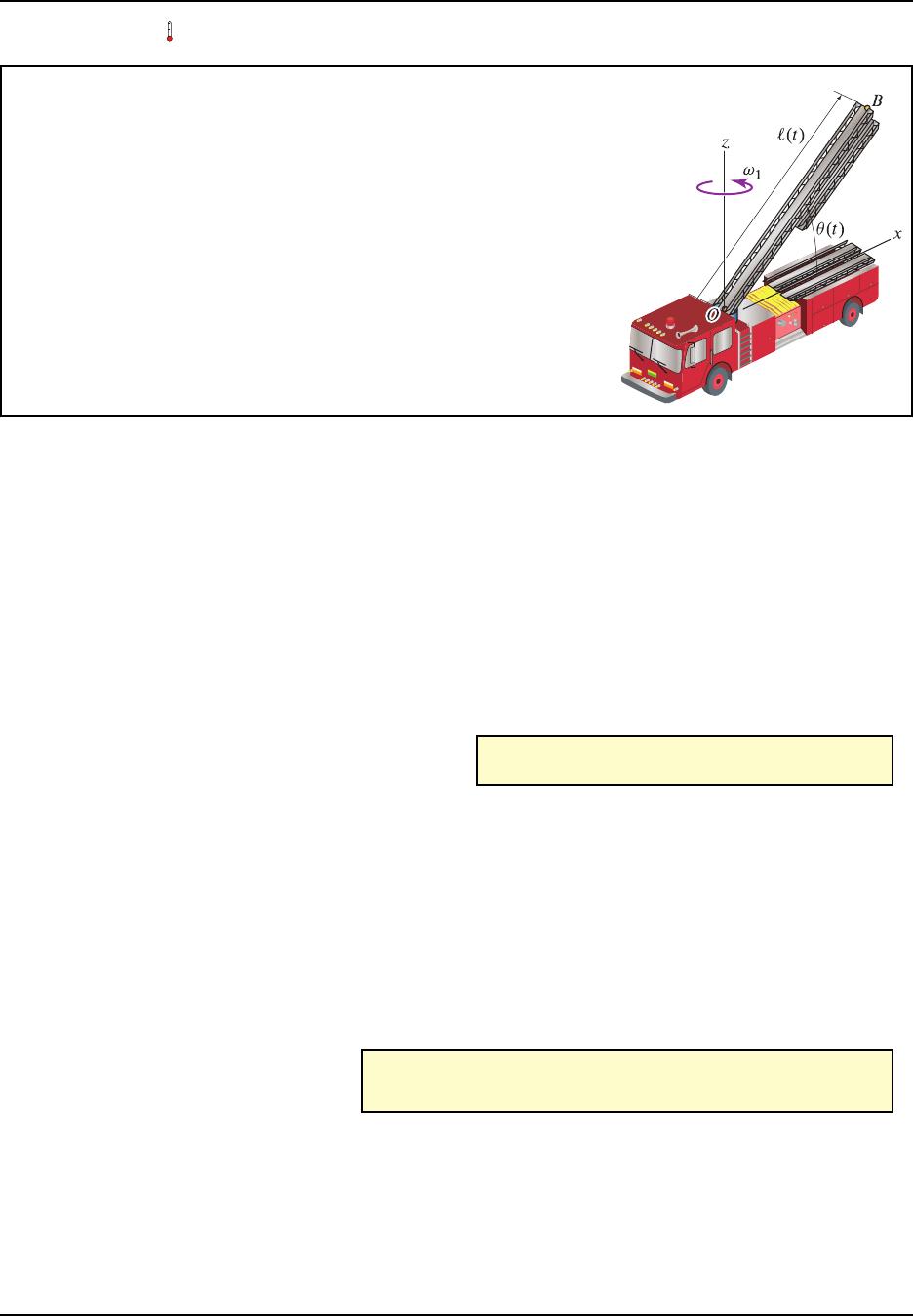
Problem 10.10
The fire truck ladder can rotate about the vertical
´
axis at known
rate
!1.t/
, elevate about the horizontal
x
axis at known rate
P
✓.t/
, and
the ladder can change its length (moving the bucket at
B
outward or
inward) with known rate P
`.t/.
If
!1
,
P
✓
, and
P
`
are each constant, determine expressions for the
velocity and acceleration of the bucket at
B
as functions of the elevation
angle ✓. Express your answer in the given rotating xy´ frame.
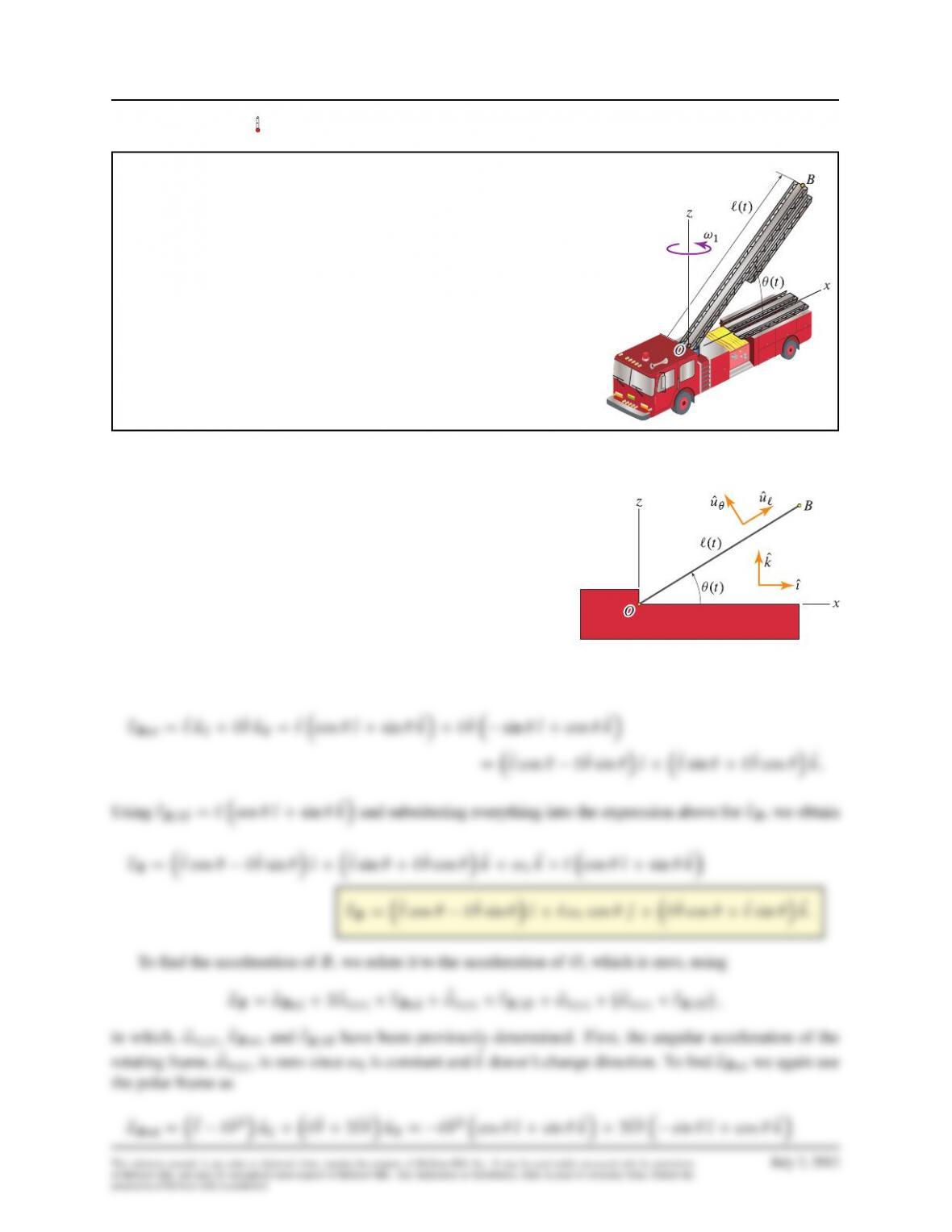
Solution
We can find the velocity of
B
by relating it to the velocity of
O
,
which is zero, using
EvBDEvBrel CE!xy´ ⇥ErB=O;
where
E!xy´ D!1O
k
is the angular velocity of the rotating frame. To
find
EvBrel
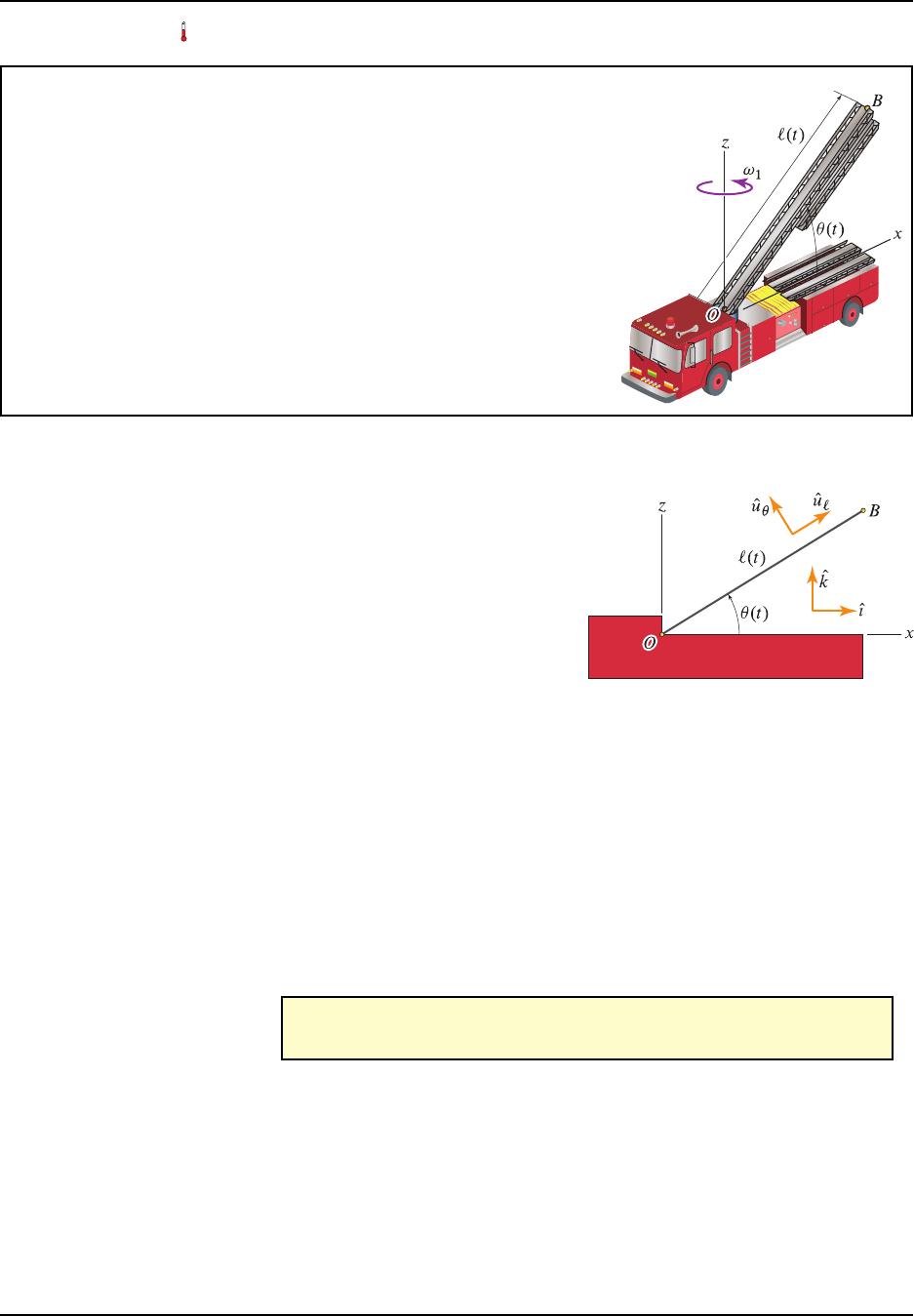
, we note that, as seen by an observer in the rotating frame,
B
is moving away from
O
and the angle
✓
is changing. Therefore,
referring to the figure on the right, we will use the polar frame
centered at Oto find EvBrel as

Dynamics 2e 2077
D⇣`P
✓2cos ✓2P
`P
✓sin ✓⌘O{C⇣`P
✓2sin ✓C2P
`P
✓cos ✓⌘O
k;
where we have used the fact that
P
`
and
P
✓
are both constant. Substituting everything into the expression for
EaB, we obtain

2078 Solutions Manual
Problem 10.11
The fire truck ladder can rotate about the vertical
´
axis at known
rate
!1.t/
, elevate about the horizontal
x
axis at known rate
P
✓.t/
, and
the ladder can change its length (moving the bucket at
B
outward or
inward) with known rate P
`.t/.
Given
!1.t/
,
P
✓.t/
, and
P
`.t/
as functions of time, determine expres-
sions for the velocity and acceleration of the bucket at
B
as functions
of the elevation angle
✓
. Express your answer in the given rotating
xy´
frame.
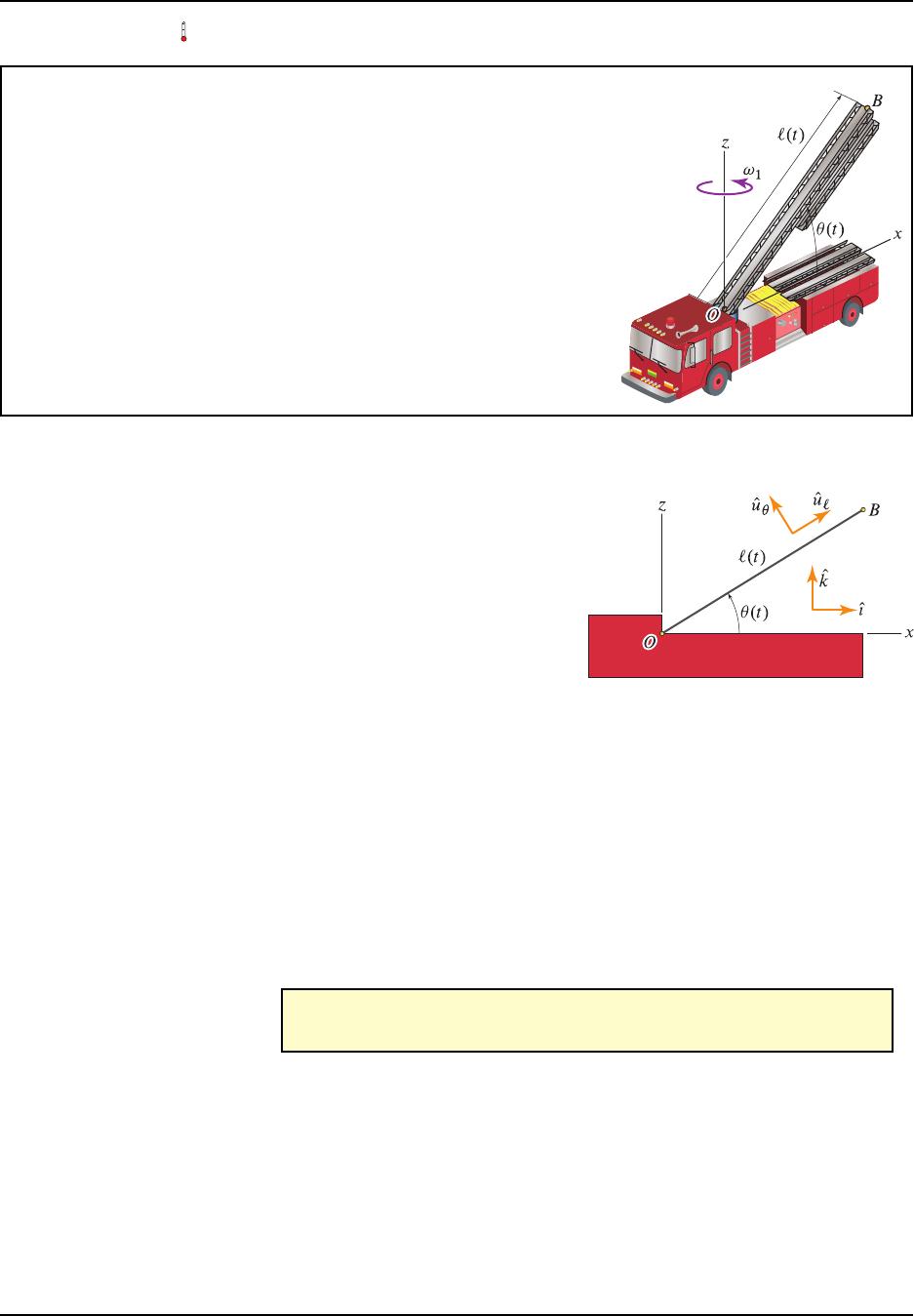
Solution
We can find the velocity of
B
by relating it to the velocity of
O
,
which is zero, using
EvBDEvBrel CE!xy´ ⇥ErB=O;
where
E!xy´ D!1O
k
is the angular velocity of the rotating frame. To
find
EvBrel
, we note that, as seen by an observer in the rotating frame,
B
is moving away from
O
and the angle
✓
is changing. Therefore,
referring to the figure on the right, we will use the polar frame
centered at Oto find EvBrel as
EvBrel DP
`Ou`C`P
✓Ou✓DP
`⇣cos ✓O{Csin ✓O
k⌘C`P
✓⇣sin ✓O{Ccos ✓O
k⌘
D⇣P
`cos ✓`P
✓sin ✓⌘O{C⇣P
`sin ✓C`P
✓cos ✓⌘O
k:
Using
ErB=O D`⇣cos ✓O{Csin ✓O
k⌘
and substituting everything into the expression above for
EvB
, we obtain