
2210 Solutions Manual
Substituting Eqs. (??) and (??) into Eq. (??), we obtain
vAO{DP
ˇpd2Ch2O{Cd.` R/
pd2Ch2P
ˇh!ACR!dO|h.` R/
pd2Ch2P
ˇCd!
AO
k:
Equating components and solving the resulting three scalar equations for vA,!A, and P
ˇ, we obtain
vADdR!d
`R;!
ADhR!d
d2Ch2;and P
ˇDdR!d
.` R/pd2Ch2:(6)
To find R
ˇand P!A, we relate the acceleration of Bto that of Ausing
EaADEaBCE˛AB ⇥ErA=B CE!AB ⇥E!AB ⇥ErA=B :(7)
Since !dis constant, the acceleration of Bis
EaBDR!2
dO{: (8)
Using the fact that the acceleration of
A
is constrained to the
x
direction and then substituting Eqs. (
??
), (
??
),
(??), (??), and (??) into Eq. (??), we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2211
Problem 10.71
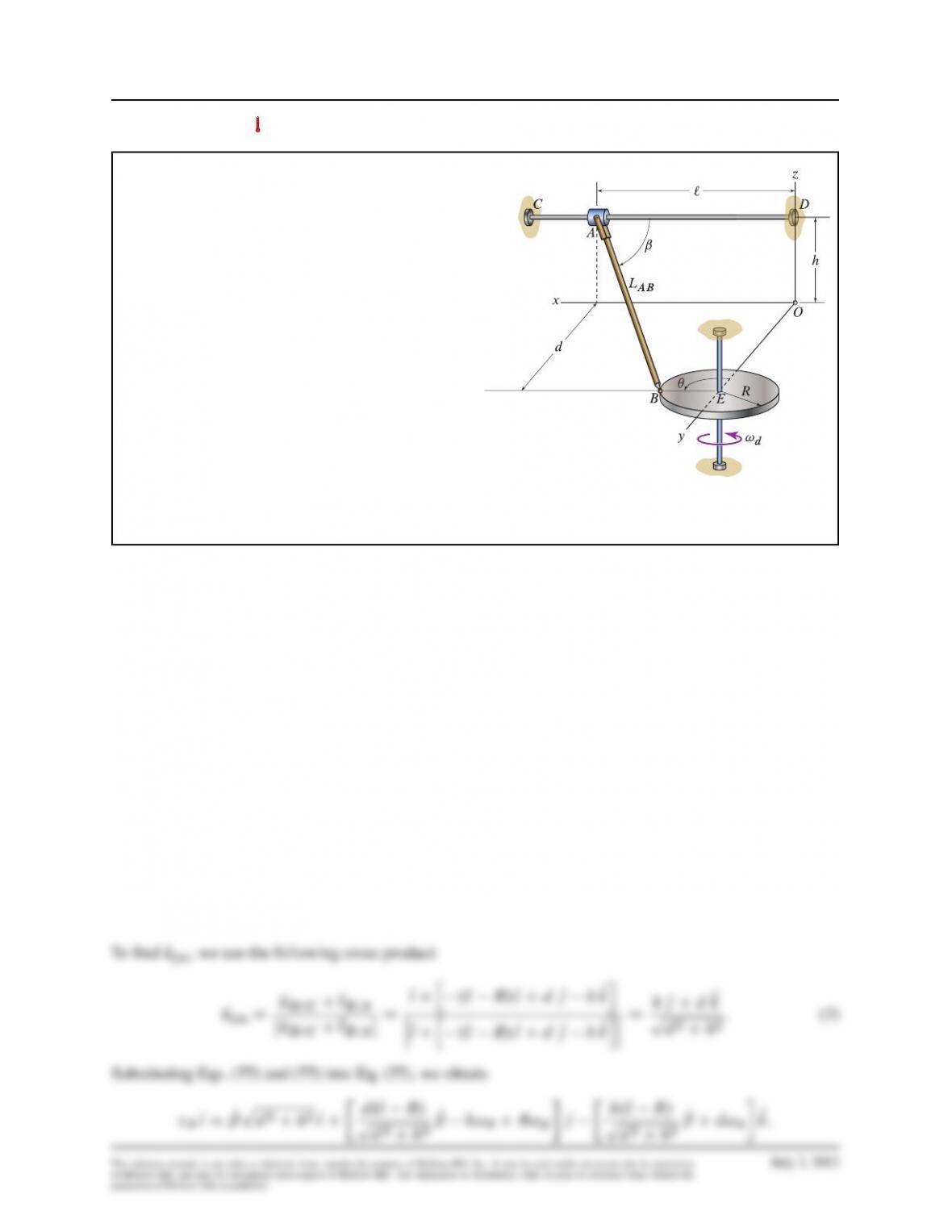
Bar
AB
of length
LAB D2:5
m is attached by a
fork and clevis joint to the collar at
A
and by a ball
joint to the disk at
B
. The disk lies in the
xy
plane,
and its center at
E
lies on the
y
axis in the
y´
plane.
The disk rotates about a vertical axis at the constant
angular rate
!dD100 rpm
. The dimensions
dD
1:2
m,
hD0:9
m, and
RD0:75
m are given. Hint:
The clevis joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the
plane formed by bar
CD
and arm
AB
. Therefore,
the angular velocity of arm
AB
is the sum of the
angular velocity of the collar at
A
and the angular
velocity associated with the change in the angle
ˇ
,
which lies in the plane formed by bars CD and AB.
For the disk position
✓D0ı
, determine the ve-
locity of the collar at
A
. Express your answer in
the given component system, and assume that the
angular velocity of the bar is orthogonal to it.
Solution
NOTE:
Given that one end of the bar is a fork and clevis joint, the angular velocity of the bar is not necessarily
orthogonal to the bar.
For the disk position shown, the velocity of Bis easily seen to be
EvBDR!dO|:
We can relate the velocity of Aand Busing
EvADEvBCE!AB ⇥ErA=B )vAO{DR!dO|C⇣!AO{CP
ˇOupin⌘⇥ErA=B ;(1)
where we have used the fact that the velocity of
A
is constrained to the
x
direction, we have expressed the
angular velocity of the bar
AB
as the sum of the angular velocity of the collar
A
and the angular velocity of
the bar
AB
relative to the collar
A
, and
Oupin
is perpendicular to the plane defined by bar
CD
and bar
AB
,
with the positive direction defined by ˇ. The position of Arelative to Bis given by
ErA=B D.`R/O{dO|ChO
k: (2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2212 Solutions Manual
Equating components and solving the resulting three scalar equations for vA,!A, and P
ˇ, we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2213
Problem 10.72
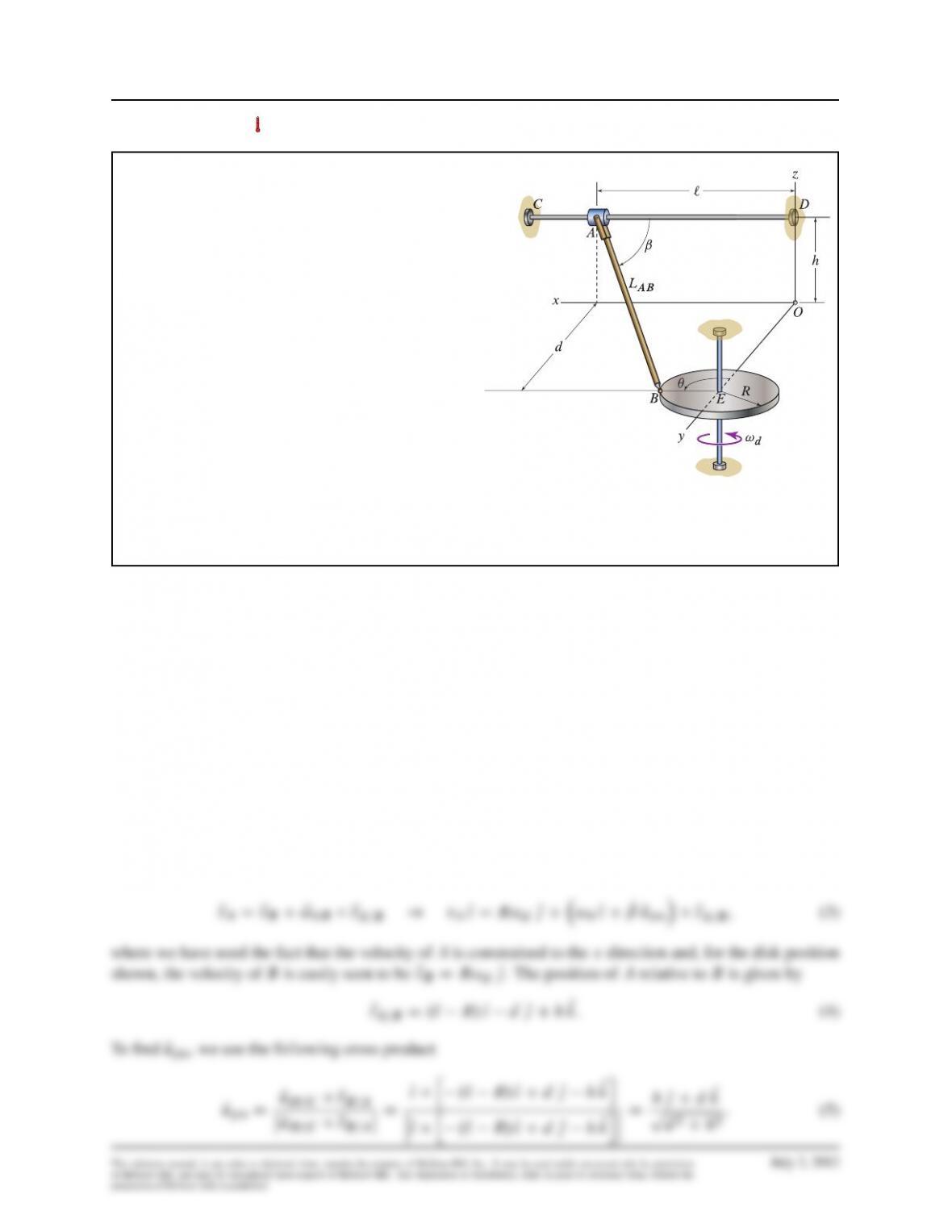
Bar
AB
of length
LAB D2:5
m is attached by a
fork and clevis joint to the collar at
A
and by a ball
joint to the disk at
B
. The disk lies in the
xy
plane,
and its center at
E
lies on the
y
axis in the
y´
plane.
The disk rotates about a vertical axis at the constant
angular rate
!dD100 rpm
. The dimensions
dD
1:2
m,
hD0:9
m, and
RD0:75
m are given. Hint:
The clevis joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the
plane formed by bar
CD
and arm
AB
. Therefore,
the angular velocity of arm
AB
is the sum of the
angular velocity of the collar at
A
and the angular
velocity associated with the change in the angle
ˇ
,
which lies in the plane formed by bars CD and AB.
For the disk position
✓D0ı
, determine the ac-
celeration of the collar at
A
. Express your answer
in the given component system, and assume that the
angular velocity and angular acceleration of the bar
are orthogonal to it.
Solution
NOTE:
Given that one end of the bar is a fork and clevis joint, the angular velocity of the bar is not necessarily
orthogonal to the bar.
The angular velocity of bar
AB
can be expressed as the sum of the angular velocity of the collar
A
and
the angular velocity of the bar AB relative to the collar A, that is
E!AB D!AO{CP
ˇOupin (1)
where
Oupin
is perpendicular to the plane defined by bar
CD
and bar
AB
, with the positive direction defined
by ˇ. Differentiating E!AB , the angular acceleration of bar AB is
E˛AB DP!AO{CR
ˇOupin CP
ˇ!AO{⇥Oupin:(2)
To determine !Aand P
ˇ, we relate the velocity of Ato that of Busing
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2214 Solutions Manual
Substituting Eqs. (??) and (??) into Eq. (??), we obtain
vAO{DP
ˇpd2Ch2O{Cd.` R/
pd2Ch2P
ˇh!ACR!dO|h.` R/
pd2Ch2P
ˇCd!
AO
k:
Equating components and solving the resulting three scalar equations for vA,!A, and P
ˇ, we obtain
vADdR!d
`R;!
ADhR!d
d2Ch2;and P
ˇDdR!d
.` R/pd2Ch2:(6)
To find R
ˇand P!A, we relate the acceleration of Bto that of Ausing
EaADEaBCE˛AB ⇥ErA=B CE!AB ⇥E!AB ⇥ErA=B :(7)
Since !dis constant, the acceleration of Bis
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2215
Problem 10.73
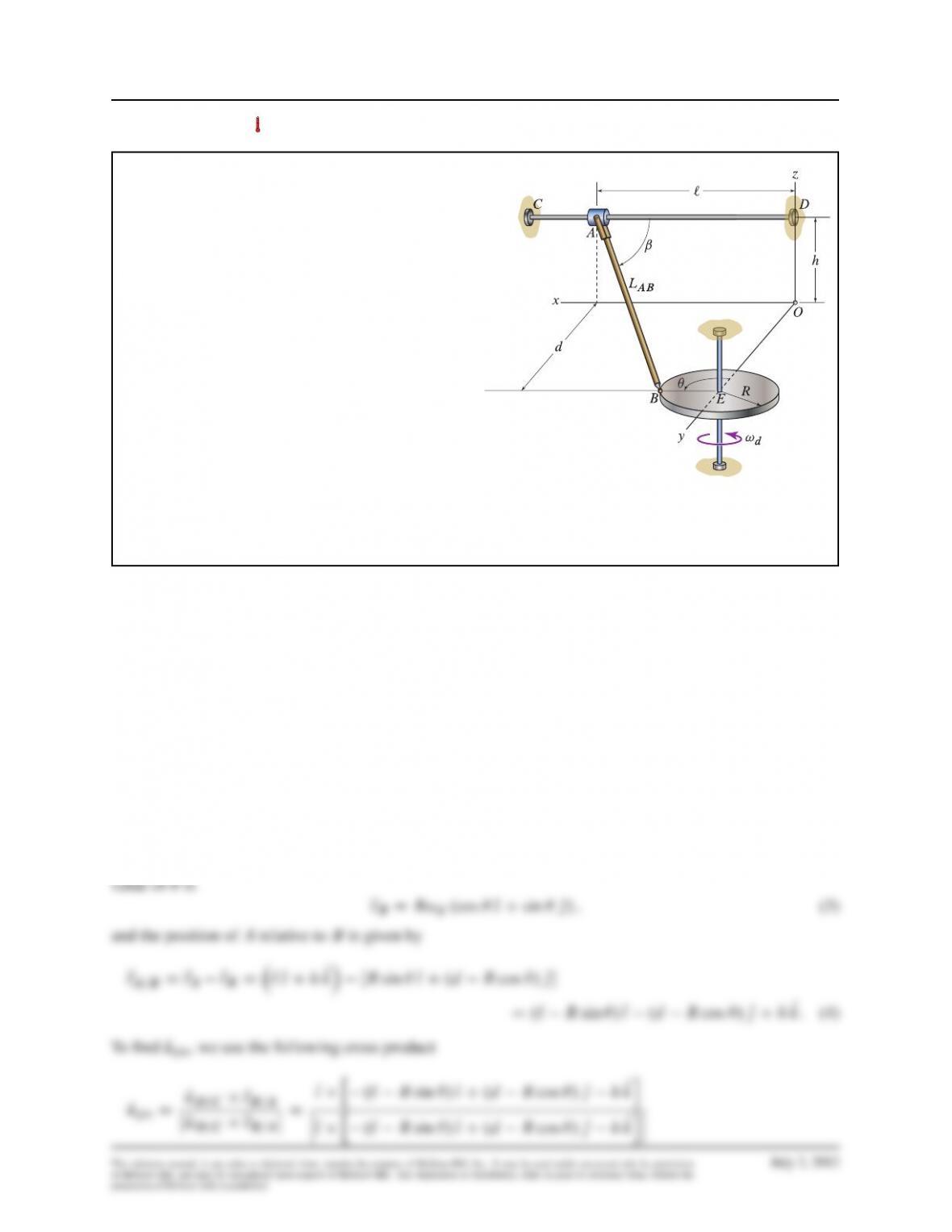
Bar
AB
of length
LAB D2:5
m is attached by a
fork and clevis joint to the collar at
A
and by a ball
joint to the disk at
B
. The disk lies in the
xy
plane,
and its center at
E
lies on the
y
axis in the
y´
plane.
The disk rotates about a vertical axis at the constant
angular rate
!dD100 rpm
. The dimensions
dD
1:2
m,
hD0:9
m, and
RD0:75
m are given. Hint:
The clevis joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the
plane formed by bar
CD
and arm
AB
. Therefore,
the angular velocity of arm
AB
is the sum of the
angular velocity of the collar at
A
and the angular
velocity associated with the change in the angle
ˇ
,
which lies in the plane formed by bars CD and AB.
Determine an expression for the angular velocity
of the bar
AB
and the velocity of the collar at
A
for
any position
✓
of the disk. Express your answers in
the given component system, and assume that the
angular velocity of the bar is orthogonal to it.
Solution
NOTE:
Given that one end of the bar is a fork and clevis joint, the angular velocity of the bar is not necessarily
orthogonal to the bar.
The angular velocity of the bar
AB
can be written as the sum of the angular velocity of the collar
A
and
the angular velocity of the bar AB relative to the collar A, that is
E!AB D!AO{CP
ˇOupin (1)
where
Oupin
is perpendicular to the plane defined by bar
CD
and bar
AB
, with the positive direction defined
by ˇ. To find !Aand P
ˇ, we can relate the velocity of Ato that of Busing
EvADEvBCE!AB ⇥ErA=B )vAO{DEvBC⇣!AO{CP
ˇOupin⌘⇥ErA=B ;(2)
where we have used the fact that the velocity of
A
is constrained to the
x
direction. The velocity of
B
for any
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2216 Solutions Manual
DhO|C.dRcos ✓/O
k
qh2C.dRcos ✓/2
:(5)
Substituting Eqs. (
??
)–(
??
) into Eq. (
??
) and then equating coefficients, we obtain the following three
equations for the unknowns vA,!A, and P
ˇ
vADR!dcos ✓CP
ˇqh2C.dRcos ✓/2;(6)
0DR!dsin ✓h!ACP
ˇ.d Rcos ✓/.` Rsin ✓/
qh2C.dRcos ✓/2
;(7)
0D!A.R cos ✓d/ChP
ˇ.Rsin ✓`/
qh2C.dRcos ✓/2
:(8)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2217
Problem 10.74
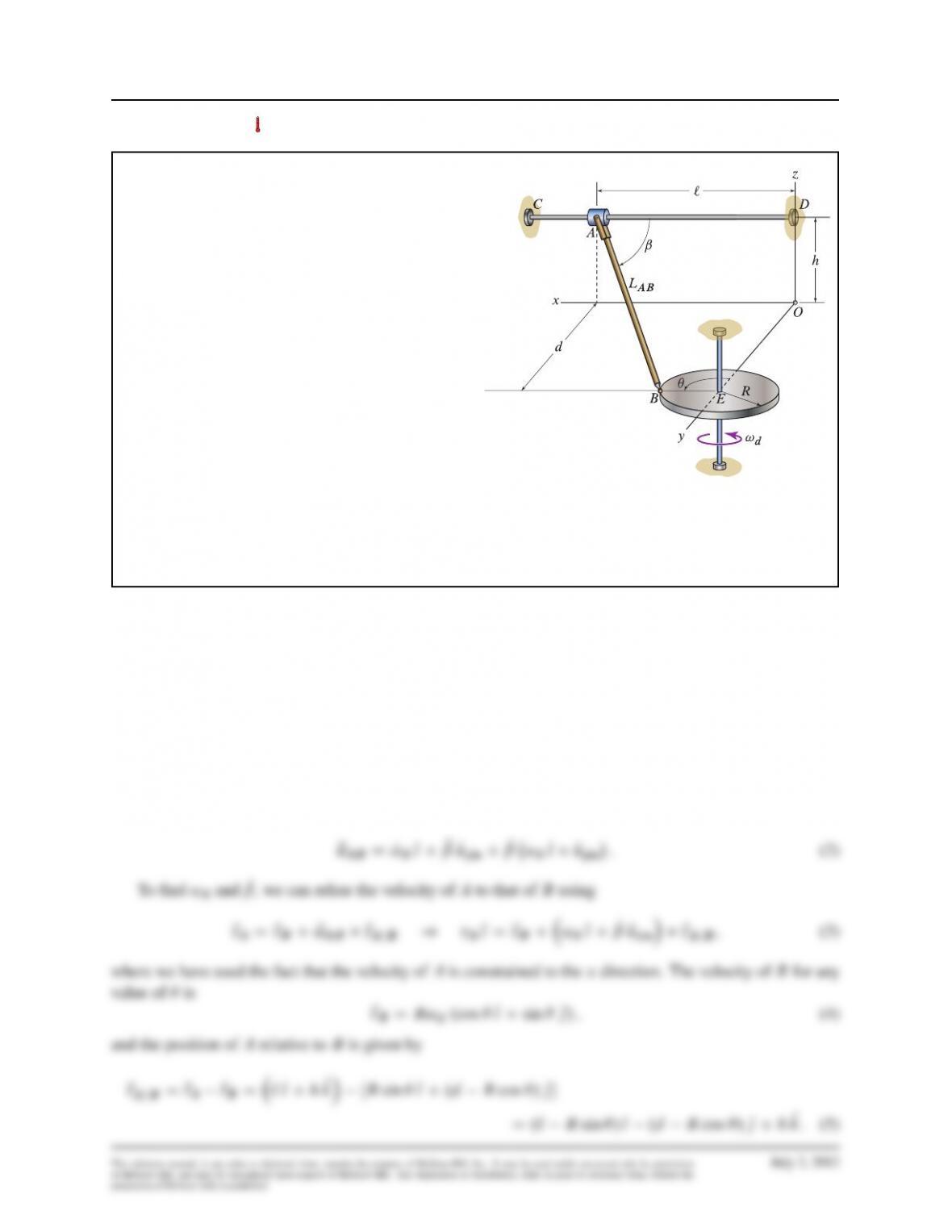
Bar
AB
of length
LAB D2:5
m is attached by a
fork and clevis joint to the collar at
A
and by a ball
joint to the disk at
B
. The disk lies in the
xy
plane,
and its center at
E
lies on the
y
axis in the
y´
plane.
The disk rotates about a vertical axis at the constant
angular rate
!dD100 rpm
. The dimensions
dD
1:2
m,
hD0:9
m, and
RD0:75
m are given. Hint:
The clevis joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the
plane formed by bar
CD
and arm
AB
. Therefore,
the angular velocity of arm
AB
is the sum of the
angular velocity of the collar at
A
and the angular
velocity associated with the change in the angle
ˇ
,
which lies in the plane formed by bars CD and AB.
Determine the angular acceleration of the bar
AB
and the acceleration of the collar at
A
for any
position
✓
of the disk. Express your answers in the
given component system, and assume that the angu-
lar velocity and angular acceleration of the bar are
orthogonal to it.
Solution
NOTE:
Given that one end of the bar is a fork and clevis joint, the angular velocity of the bar is not necessarily
orthogonal to the bar.
The angular velocity of the bar
AB
can be written as the sum of the angular velocity of the collar
A
and
the angular velocity of the bar AB relative to the collar A, that is
E!AB D!AO{CP
ˇOupin (1)
where
Oupin
is perpendicular to the plane defined by bar
CD
and bar
AB
, with the positive direction defined
by ˇ. Differentiating E!AB , the angular acceleration of bar AB is
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2218 Solutions Manual
To find Oupin, we use the following cross product
Oupin DOuD=C ⇥ErB=A
ˇˇOuD=C ⇥ErB=AˇˇDO{⇥h.`Rsin ✓/O{C.dRcos ✓/O|hO
ki
ˇˇˇO{⇥h.`Rsin ✓/O{C.dRcos ✓/O|hO
kiˇˇˇ
DhO|C.dRcos ✓/O
k
qh2C.dRcos ✓/2
:(6)
Substituting Eqs. (
??
)–(
??
) into Eq. (
??
) and then equating coefficients, we obtain the following three
equations for the unknowns vA,!A, and P
ˇ
vADR!dcos ✓CP
ˇqh2C.dRcos ✓/2;(7)
ˇ.d Rcos ✓/.` Rsin ✓/
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2219
CR⇣2d P
ˇ!
AhR
ˇ⌘sin ✓2R P
ˇ!
Acos ✓.Rsin ✓`/i;(17)
where we have yet to substitute in the solutions for
!A
and
P
ˇ
in Eqs. (
??
) and (
??
). Solving Eqs. (
??
)–(
??
)
for aA,R
ˇ, and P!Aand then substituting in the velocity solutions in Eqs. (??) and (??), we obtain
aADR!2
d
4.`Rsin ✓/3h2d2R6R`2dR24`2cos ✓C2R d2C`2cos 2✓
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2220 Solutions Manual
angular acceleration of bar AB is
E˛AB DhR! 2
d⇥4d2Ch2C5R2cos ✓R.8d CRcos 3✓/⇤
4⇥d2Ch2CRcos ✓.Rcos ✓2d/⇤2O{
ChR!2
d
⇥d2Ch2CRcos ✓.Rcos ✓2d/⇤2.Rsin ✓`/3⇢R3`cos4✓.2R sin ✓`/
dR2cos3✓⇥3`2CRsin ✓.6` CRsin ✓/⇤
Rcos2✓h3d 2Ch2`2CRsin ✓⇥23d 2Ch2`
CRsin ✓`23d 2CRsin ✓.Rsin ✓2`/⇤i
Cdcos ✓hd2Ch2`2CRsin ✓⇥2d2Ch2`
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.