Dynamics 2e 2199
Problem 10.65
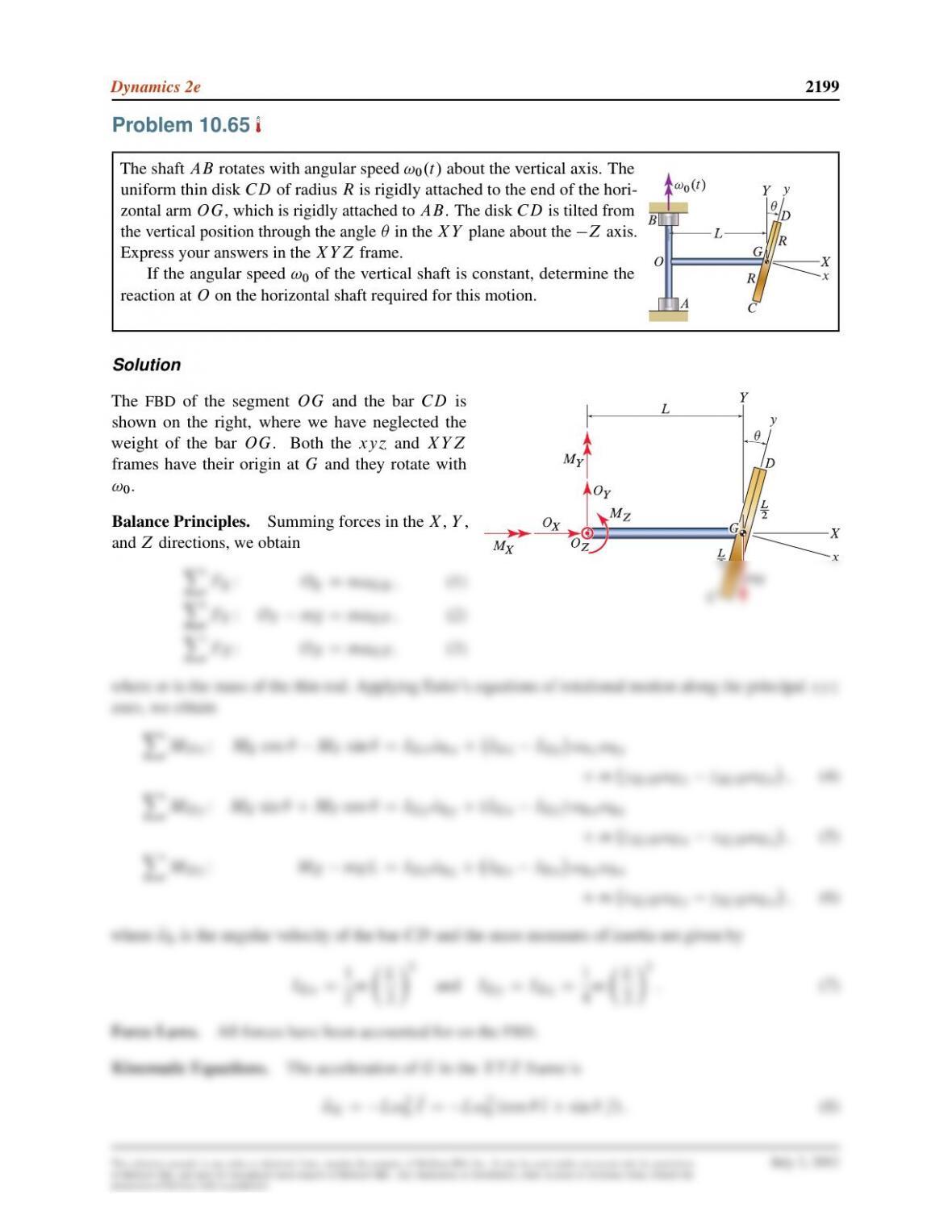
The shaft
AB
rotates with angular speed
!0.t/
about the vertical axis. The
uniform thin disk
CD
of radius
R
is rigidly attached to the end of the hori-
zontal arm
OG
, which is rigidly attached to
AB
. The disk
CD
is tilted from
the vertical position through the angle
✓
in the
XY
plane about the
Z
axis.
Express your answers in the XYZ frame.
If the angular speed
!0
of the vertical shaft is constant, determine the
reaction at Oon the horizontal shaft required for this motion.
Solution
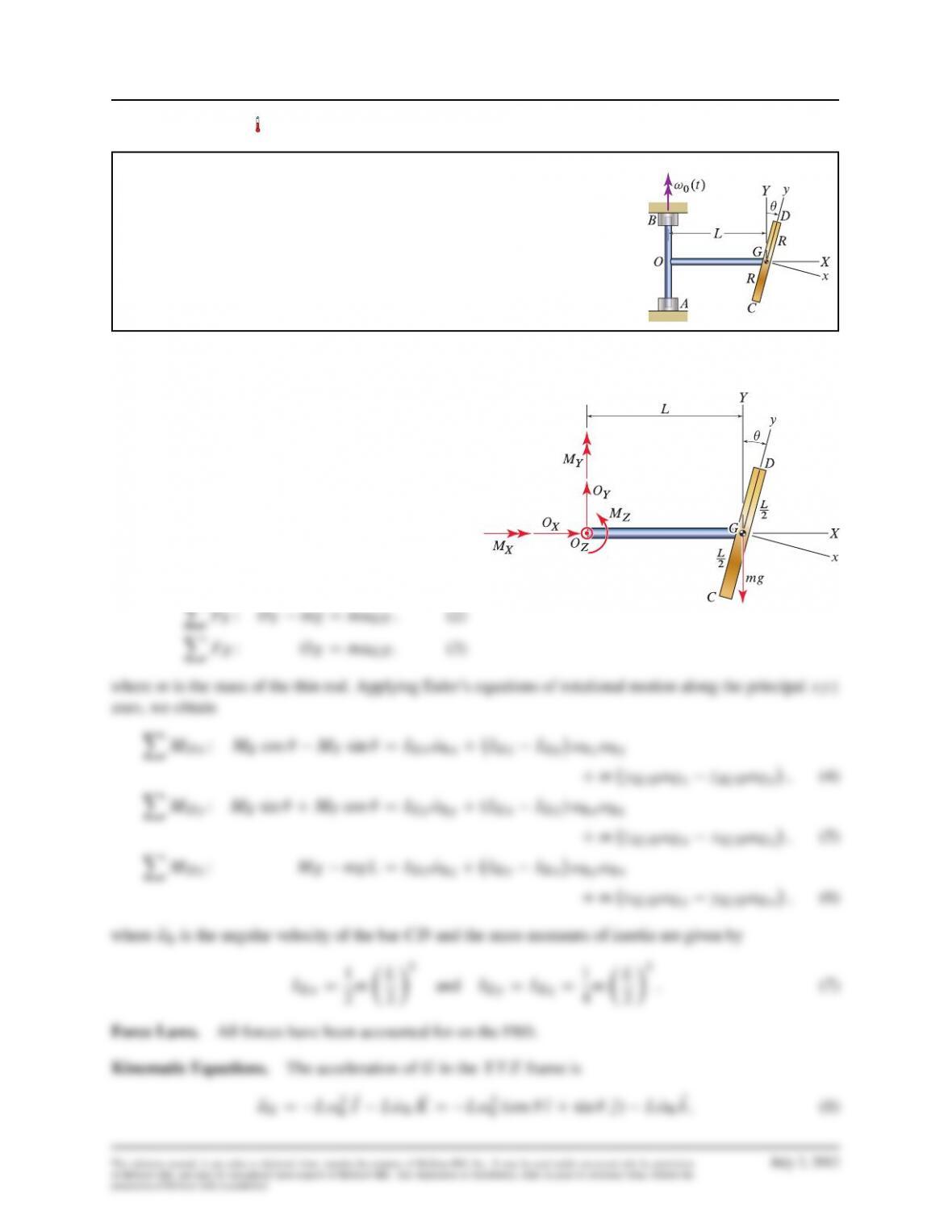
The FBD of the segment
OG
and the bar
CD
is
shown on the right, where we have neglected the
weight of the bar
OG
. Both the
xy´
and
XYZ
frames have their origin at
G
and they rotate with
!0.
Balance Principles.
Summing forces in the
X
,
Y
,
and Zdirections, we obtain
XFXWOXDmaGX ;(1)
XFYWOYmg DmaGY ;(2)

2200 Solutions Manual
The position of Grelative to Ois
ErG=O DLO
IDL.cos ✓O{Csin ✓O|/:(9)
The angular velocity and angular acceleration of the bar CD are, respectively,
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2201
Problem 10.66
The shaft
AB
rotates with angular speed
!0.t/
about the vertical axis. The
uniform thin disk
CD
of radius
R
is rigidly attached to the end of the hori-
zontal arm
OG
, which is rigidly attached to
AB
. The disk
CD
is tilted from
the vertical position through the angle
✓
in the
XY
plane about the
Z
axis.
Express your answers in the XYZ frame.
If the angular speed
!0.t/
of the vertical shaft is not constant, determine
the reaction at Oon the horizontal shaft required for this motion.
Solution
The FBD of the segment
OG
and the bar
CD
is
shown on the right, where we have neglected the
weight of the bar
OG
. Both the
xy´
and
XYZ
frames have their origin at
G
and they rotate with
!0.
Balance Principles.
Summing forces in the
X
,
Y
,
and Zdirections, we obtain
XFXWOXDmaGX ;(1)
XFYWOYmg DmaGY ;(2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2202 Solutions Manual
where we have used the fact that O
KDO
k. The position of Grelative to Ois
ErG=O DLO
IDL.cos ✓O{Csin ✓O|/:(9)
The angular velocity and angular acceleration of the bar CD are, respectively,
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2203
Problem 10.67
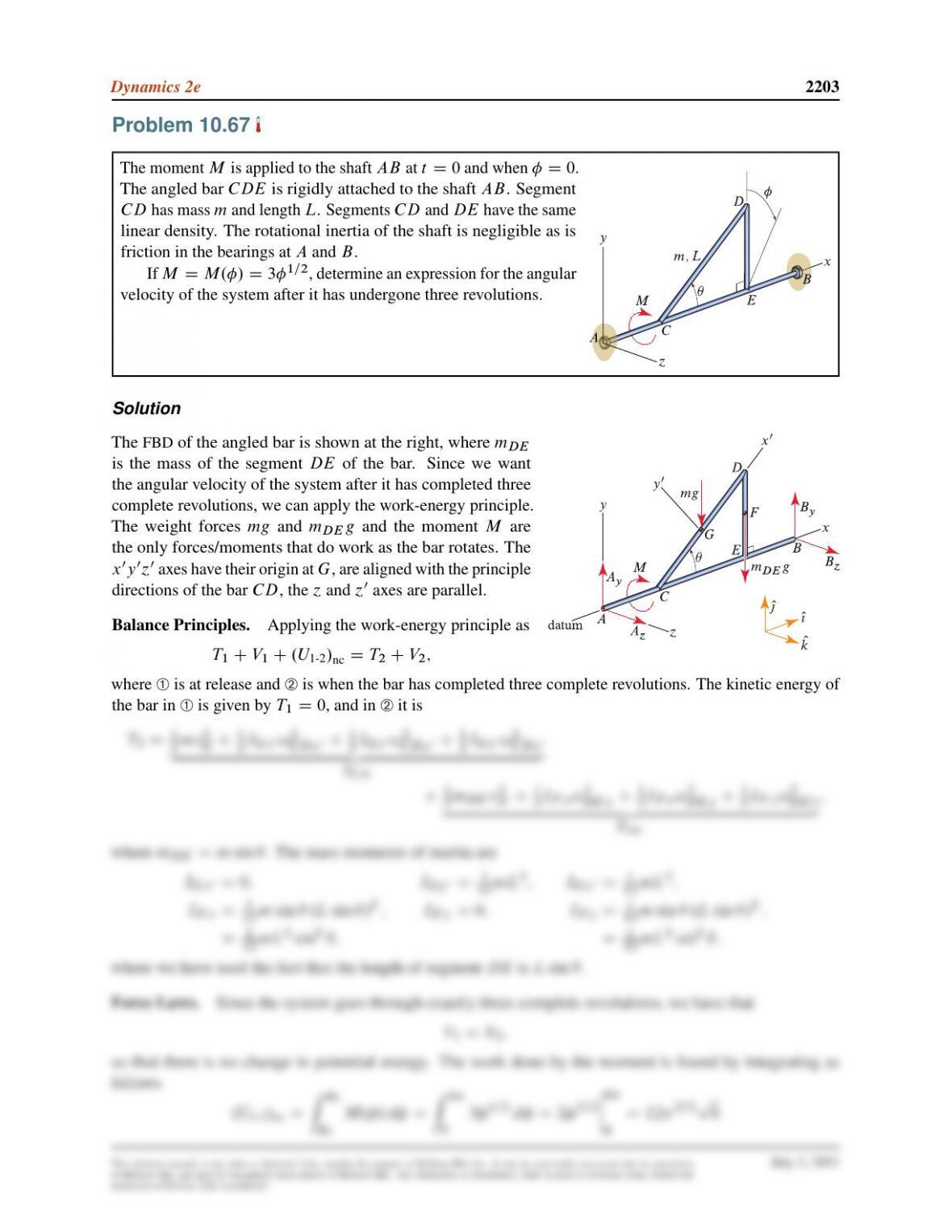
The moment
M
is applied to the shaft
AB
at
tD0
and when
D0
.
The angled bar
CDE
is rigidly attached to the shaft
AB
. Segment
CD
has mass
m
and length
L
. Segments
CD
and
DE
have the same
linear density. The rotational inertia of the shaft is negligible as is
friction in the bearings at Aand B.
If
MDM./D31=2
, determine an expression for the angular
velocity of the system after it has undergone three revolutions.
Solution
The FBD of the angled bar is shown at the right, where
mDE
is the mass of the segment
DE
of the bar. Since we want
the angular velocity of the system after it has completed three
complete revolutions, we can apply the work-energy principle.
The weight forces
mg
and
mDE g
and the moment
M
are
the only forces/moments that do work as the bar rotates. The
x0y0´0
axes have their origin at
G
, are aligned with the principle
directions of the bar CD, the ´and ´0axes are parallel.
Balance Principles. Applying the work-energy principle as
T1CV1C.U1-2/nc DT2CV2;
where
¿
is at release and
¡
is when the bar has completed three complete revolutions. The kinetic energy of
the bar in ¿is given by T1D0, and in ¡it is
T2D1
2mv2
GC1
2IGx0!2
CDx0C1
2IGy0!2
CDy0C1
2IG´0!2
CD´0
„ ƒ‚ …
TCD

2204 Solutions Manual
Kinematic Equations. The components of the angular velocity of the bar in the xy´ frame are
!DE x D!bar;!
DE y D0; and !DE ´ D0;
and the components of the angular velocity in the x0y0´0frame are
!CDx0D!bar cos ✓; !CDy0D!bar sin ✓;and !CD´0D0:
The speed of points Gand Fin terms of !bar are
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2205
Problem 10.68
The moment
M
is applied to the shaft
AB
at
tD0
and when
D0
.
The angled bar
CDE
is rigidly attached to the shaft
AB
. Segment
CD
has mass
m
and length
L
. Segments
CD
and
DE
have the same
linear density. The rotational inertia of the shaft is negligible as is
friction in the bearings at Aand B.
If
MDM.t/ D5t1=3
, determine an expression for the angular
velocity of the system when tD15 s.
Solution
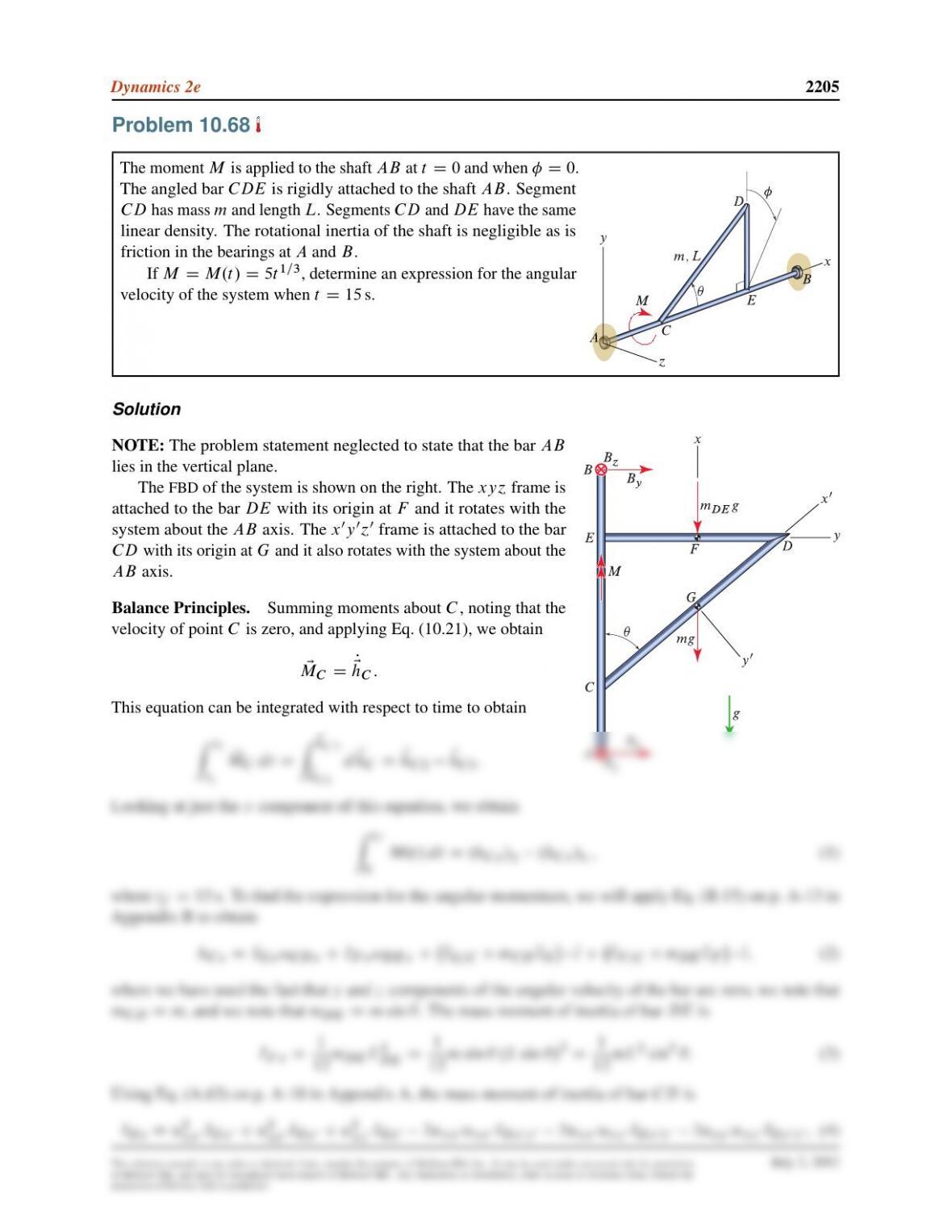
NOTE:
The problem statement neglected to state that the bar
AB
lies in the vertical plane.
The FBD of the system is shown on the right. The
xy´
frame is
attached to the bar
DE
with its origin at
F
and it rotates with the
system about the
AB
axis. The
x0y0´0
frame is attached to the bar
CD
with its origin at
G
and it also rotates with the system about the
AB axis.
Balance Principles.
Summing moments about
C
, noting that the
velocity of point Cis zero, and applying Eq. (10.21), we obtain
E
MCDP
E
hC:
This equation can be integrated with respect to time to obtain
Zt2
MCdt DZE
hC2
dE
hCDE
hC2 E
hC1:

2206 Solutions Manual
where
uab
is the cosine of the angle between the
a
axis and the
b
axis. Noting that all the products of inertia
are zero, that IGx0D0, and that ux´0D0, Eq. (??) becomes
IGx D1
12mCDL2
CD cos2✓C⇡
2D1
12mL2sin2✓:(5)
Force Laws. The expression for M.t / is given as
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2207
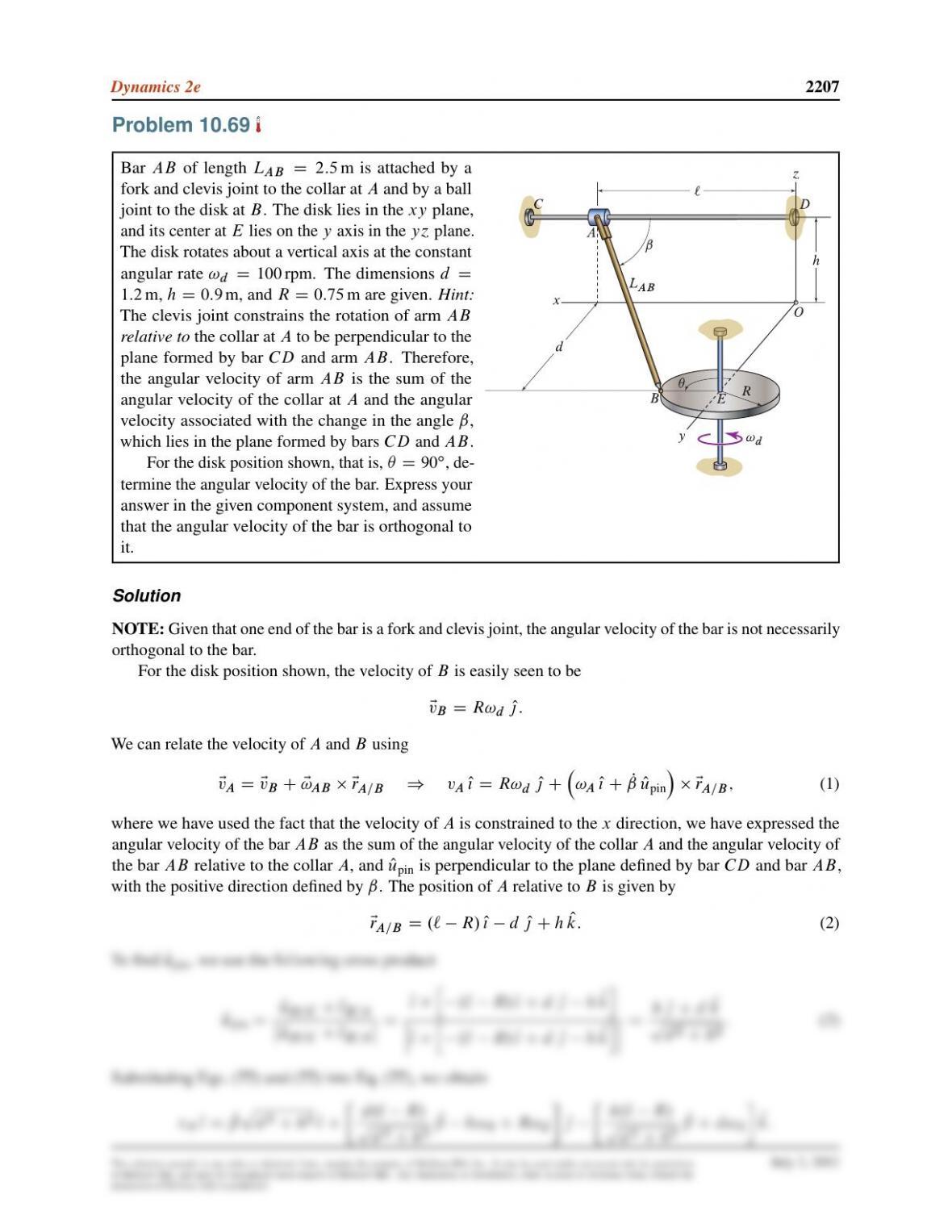
Problem 10.69
Bar
AB
of length
LAB D2:5
m is attached by a
fork and clevis joint to the collar at
A
and by a ball
joint to the disk at
B
. The disk lies in the
xy
plane,
and its center at
E
lies on the
y
axis in the
y´
plane.
The disk rotates about a vertical axis at the constant
angular rate
!dD100 rpm
. The dimensions
dD
1:2
m,
hD0:9
m, and
RD0:75
m are given. Hint:
The clevis joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the
plane formed by bar
CD
and arm
AB
. Therefore,
the angular velocity of arm
AB
is the sum of the
angular velocity of the collar at
A
and the angular
velocity associated with the change in the angle
ˇ
,
which lies in the plane formed by bars CD and AB.
For the disk position shown, that is,
✓D90ı
, de-
termine the angular velocity of the bar. Express your
answer in the given component system, and assume
that the angular velocity of the bar is orthogonal to
it.
Solution
NOTE:
Given that one end of the bar is a fork and clevis joint, the angular velocity of the bar is not necessarily
orthogonal to the bar.
For the disk position shown, the velocity of Bis easily seen to be
EvBDR!dO|:
We can relate the velocity of Aand Busing
EvADEvBCE!AB ⇥ErA=B )vAO{DR!dO|C⇣!AO{CP
ˇOupin⌘⇥ErA=B ;(1)
where we have used the fact that the velocity of
A
is constrained to the
x
direction, we have expressed the
angular velocity of the bar
AB
as the sum of the angular velocity of the collar
A
and the angular velocity of
the bar
AB
relative to the collar
A
, and
Oupin
is perpendicular to the plane defined by bar
CD
and bar
AB
,
with the positive direction defined by ˇ. The position of Arelative to Bis given by
ErA=B D.`R/O{dO|ChO
k: (2)
To find Oupin, we use the following cross product

2208 Solutions Manual
Equating components and solving the resulting three scalar equations for vA,!A, and P
ˇ, we obtain
vADdR!d
`R;!
ADhR!d
d2Ch2;and P
ˇDdR!d
.` R/pd2Ch2:
Therefore, the angular velocity of bar AB is
k
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2209
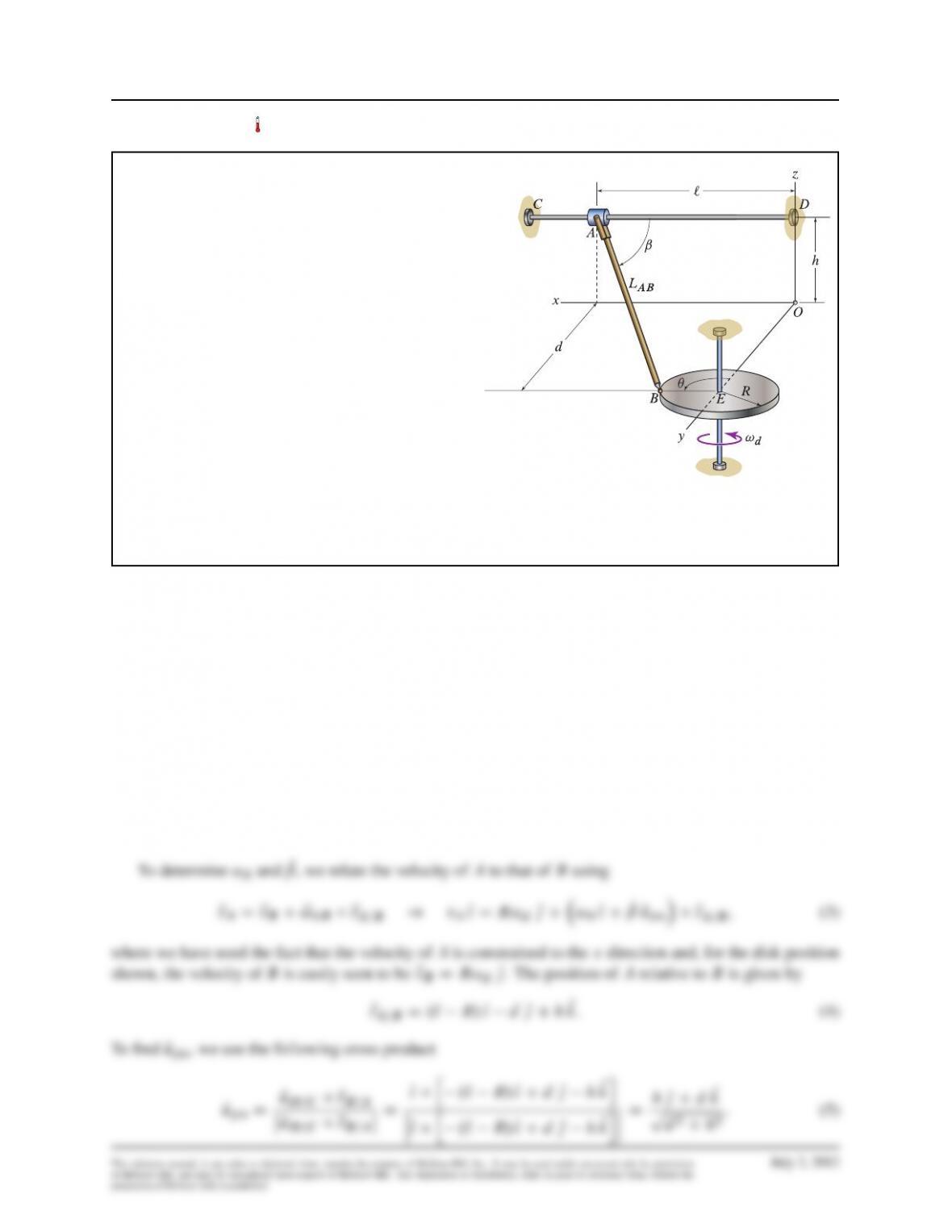
Problem 10.70
Bar
AB
of length
LAB D2:5
m is attached by a
fork and clevis joint to the collar at
A
and by a ball
joint to the disk at
B
. The disk lies in the
xy
plane,
and its center at
E
lies on the
y
axis in the
y´
plane.
The disk rotates about a vertical axis at the constant
angular rate
!dD100 rpm
. The dimensions
dD
1:2
m,
hD0:9
m, and
RD0:75
m are given. Hint:
The clevis joint constrains the rotation of arm
AB
relative to the collar at
A
to be perpendicular to the
plane formed by bar
CD
and arm
AB
. Therefore,
the angular velocity of arm
AB
is the sum of the
angular velocity of the collar at
A
and the angular
velocity associated with the change in the angle
ˇ
,
which lies in the plane formed by bars CD and AB.
For the disk position shown, that is,
✓D90ı
,
determine the angular acceleration of the bar. Ex-
press your answer in the given component system,
and assume that the angular velocity and angular
acceleration of the bar are orthogonal to it.
Solution
NOTE:
Given that one end of the bar is a fork and clevis joint, the angular velocity of the bar is not necessarily
orthogonal to the bar.
The angular velocity of bar
AB
can be expressed as the sum of the angular velocity of the collar
A
and
the angular velocity of the bar AB relative to the collar A, that is
E!AB D!AO{CP
ˇOupin (1)
where
Oupin
is perpendicular to the plane defined by bar
CD
and bar
AB
, with the positive direction defined
by ˇ. Differentiating E!AB , the angular acceleration of bar AB is
E˛AB DP!AO{CR
ˇOupin CP
ˇ!AO{⇥Oupin:(2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.