
Dynamics 2e 2149
Problem 10.41
The uniform bar
AB
of length
L
and mass
m
is attached to the T-bar
support by a frictionless pin at
A
. The mass of the T-bar is negligible,
and it rotates freely in the bearings at
C
and
D
. The
x0y0´0
frame
is attached to the T-bar at
A
and is aligned as shown. The angle
between the bar
AB
and the
x0
axis is
ˇ
, and the angle measuring the
orientation of the T-bar is
. Determine the equations of motion of
the system in terms of the angles ˇand .
Solution
This system has two degrees of freedom, so we know that we will need two
equations of motion. As required by the problem statement, we will use
ˇ
and
as the dependent variables. Referring to the FBD on the right, we see
that the pin connection at
A
implies that we write three orthogonal force
reactions at
A
and two orthogonal moment reactions (if the pin is smooth,
there is no moment in the ydirection at the pin).
Balance Principles.
Summing moments about
A
in the body-fixed
x
,
y
,
and ´directions, we obtain
XMAx WMAx DIGx P!ABx CIG´ IGy !AB´!ABy
CmyG=AaG´ ´G=AaGy ;(1)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2150 Solutions Manual
DR
⇣cos ˇO
ksin ˇO{⌘CR
ˇO|CP
ˇP
⇣cos ˇO
ksin ˇO{⌘⇥O|(7)
D⇣R
sin ˇCP
ˇP
cos ˇ⌘O{CR
ˇO|C⇣R
cos ˇP
ˇP
sin ˇ⌘O
k; (8)
where we have used the fact that
P
O
k0DE
0
. Now that we have
ErG=A
,
E!AB
, and
E˛AB
, we can find the acceleration
of the mass center Gusing
EaGDEaACE˛AB ⇥ErG=A CE!AB ⇥E!AB ⇥ErG=A(9)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2151
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2152 Solutions Manual
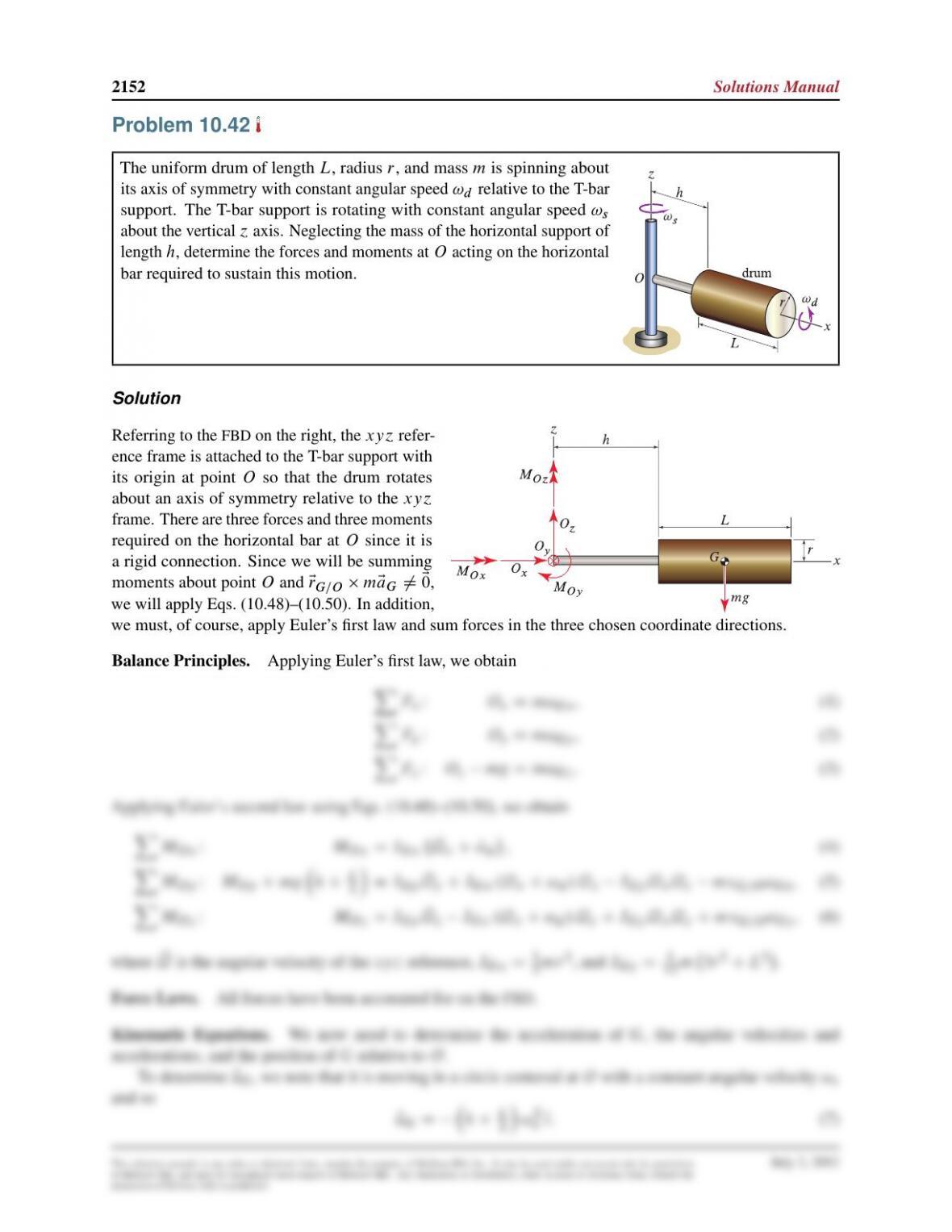
Problem 10.42
The uniform drum of length
L
, radius
r
, and mass
m
is spinning about
its axis of symmetry with constant angular speed
!d
relative to the T-bar
support. The T-bar support is rotating with constant angular speed
!s
about the vertical
´
axis. Neglecting the mass of the horizontal support of
length
h
, determine the forces and moments at
O
acting on the horizontal
bar required to sustain this motion.
Solution
Referring to the FBD on the right, the
xy´
refer–
ence frame is attached to the T-bar support with
its origin at point
O
so that the drum rotates
about an axis of symmetry relative to the
xy´
frame. There are three forces and three moments
required on the horizontal bar at
O
since it is
a rigid connection. Since we will be summing
moments about point
O
and
ErG=O ⇥mEaG¤E
0
,
we will apply Eqs. (10.48)–(10.50). In addition,
we must, of course, apply Euler’s first law and sum forces in the three chosen coordinate directions.
Balance Principles. Applying Euler’s first law, we obtain
XFxWOxDmaGx;(1)
XFyWOyDmaGy ;(2)

Dynamics 2e 2153
The angular velocity and acceleration of the rotating reference frame can be expressed in the xy´ frame as
E
˝D!sO
kand P
E
˝DE
0: (8)
Finally, noting the position of Grelative to Ois given by
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2154 Solutions Manual
Problem 10.43
The uniform bar
AB
of length
L
and mass
m
is attached to the T-bar
support by a pin at
A
. The
x0y0´0
frame is attached to the T-bar at
A
and is aligned as shown. The support rotates with angular speed
!s
, and the angle between the bar
AB
and the
x0
axis is a known
function of time ˇ.t /. Determine the kinetic energy of the bar AB.
Solution
Using the
xy´
frame that is attached to the mass center of the bar
AB
and is aligned as shown, then all
products of inertia with respect to that frame will be zero and we can write the kinetic energy of the bar as
TD1
2mv2
GC1
2IGx!2
ABx C1
2IGy !2
ABy C1
2IG´!2
AB´;(1)
where
IGx D0
,
IGy DIG´ D1
12 mL2
, and
E!AB D!ABx O{C!ABy O|C!AB´ O
k
is the angular velocity of
the bar AB. The velocity of point Gcan be found using
EvGDEvACE!AB ⇥ErG=A Dd!sO|0C⇣!ABx O{C!ABy O|C!AB´ O
k⌘⇥L
2O{: (2)
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2155
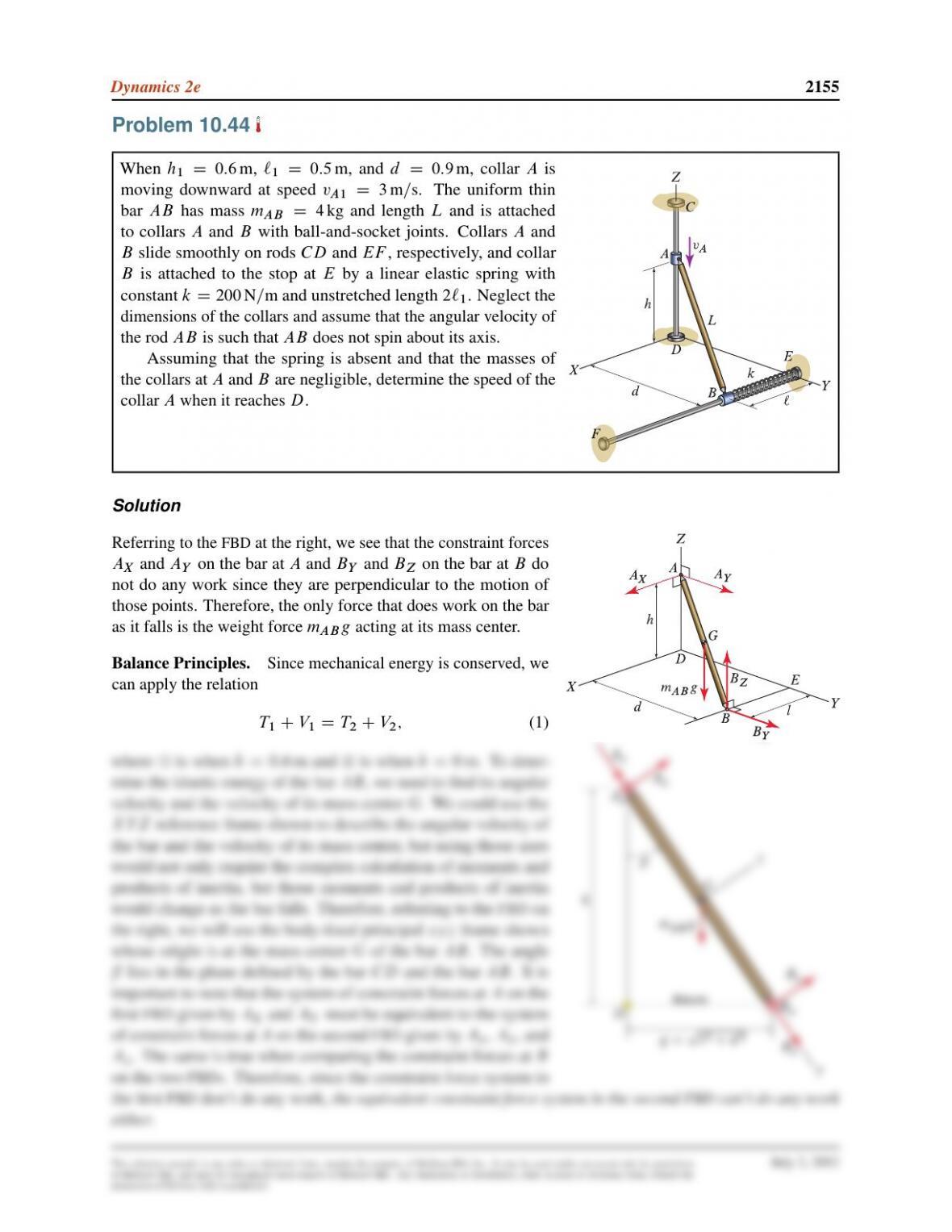
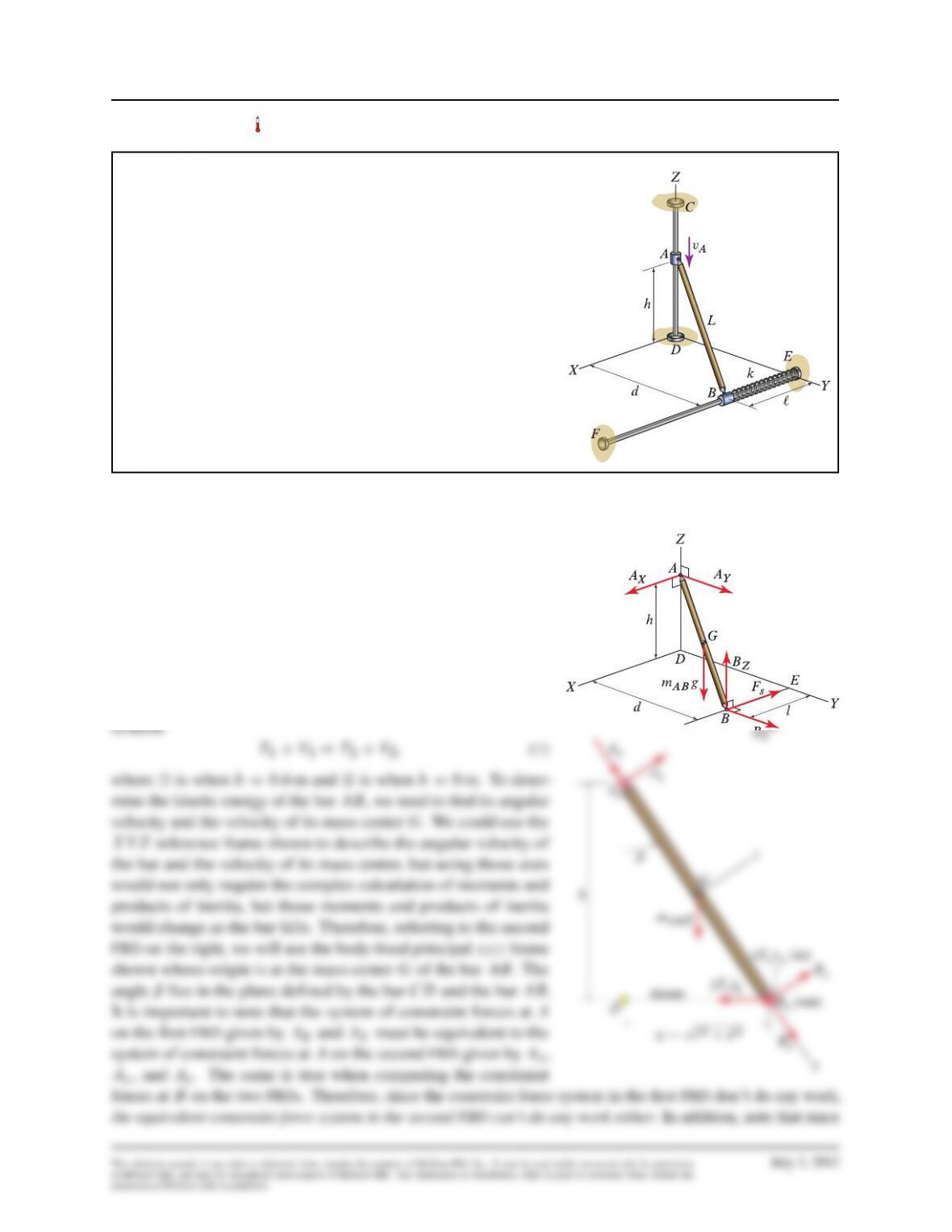
Problem 10.44
When
h1D0:6
m,
`1D0:5
m, and
dD0:9
m, collar
A
is
moving downward at speed
vA1 D3m=s
. The uniform thin
bar
AB
has mass
mAB D4kg
and length
L
and is attached
to collars
A
and
B
with ball-and-socket joints. Collars
A
and
B
slide smoothly on rods
CD
and
EF
, respectively, and collar
B
is attached to the stop at
E
by a linear elastic spring with
constant
kD200 N=m
and unstretched length
2`1
. Neglect the
dimensions of the collars and assume that the angular velocity of
the rod AB is such that AB does not spin about its axis.
Assuming that the spring is absent and that the masses of
the collars at
A
and
B
are negligible, determine the speed of the
collar Awhen it reaches D.
Solution
Referring to the FBD at the right, we see that the constraint forces
AX
and
AY
on the bar at
A
and
BY
and
BZ
on the bar at
B
do
not do any work since they are perpendicular to the motion of
those points. Therefore, the only force that does work on the bar
as it falls is the weight force mAB gacting at its mass center.
Balance Principles.
Since mechanical energy is conserved, we
can apply the relation
T1CV1DT2CV2;(1)
where
¿
is when
hD0:6
m and
¡
is when
hD0
m. To deter–
mine the kinetic energy of the bar
AB
, we need to find its angular

2156 Solutions Manual
With all of this in mind, we can now write the kinetic energy of the bar AB as
TD1
2mAB v2
GC1
2IGx!2
ABx C1
2IGy !2
ABy C1
2IG´!2
AB´;(2)
where IGx DIG´ D1
12 mAB L2and IGy D0.
Force Laws.
Placing the datum line for zero gravitational potential energy at
ZD0
, we can conclude that
in ¡
V2D0: (3)
In ¿, we have that
V1DmAB gh1
2D11:77 J:(4)
Kinematic Equations.
To determine the angular velocity of
AB
, we note that we can relate the velocity of
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

Dynamics 2e 2157
Now, we can determine the components of the angular velocity in the xy´ frame using
!ABx DE!AB O{DvA
pd2Cl2;(16)
!ABy DE!AB O|D0; (17)
A
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
2158 Solutions Manual
Problem 10.45
When
h1D0:6
m,
`1D0:5
m, and
dD0:9
m, collar
A
is
moving downward at speed
vA1 D3m=s
. The uniform thin
bar
AB
has mass
mAB D4kg
and length
L
and is attached
to collars
A
and
B
with ball-and-socket joints. Collars
A
and
B
slide smoothly on rods
CD
and
EF
, respectively, and collar
B
is attached to the stop at
E
by a linear elastic spring with
constant
kD200 N=m
and unstretched length
2`1
. Neglect the
dimensions of the collars and assume that the angular velocity of
the rod AB is such that AB does not spin about its axis.
Assuming that the masses of the collars at
A
and
B
are negli-
gible, determine the speed of the collar Awhen it reaches D.
Solution
Referring to the FBD at the right, we see that the constraint forces
AX
and
AY
on the bar at
A
and
BY
and
BZ
on the bar at
B
do no
work since they are perpendicular to the motion of those points.
Therefore, the only forces that do work on the bar as it falls are
the weight force
mAB g
acting at its mass center and the spring
force Fsacting at B.
Balance Principles.
Since all the forces doing work are con-
servative, we can say that energy is conserved and can apply the
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.