Dynamics 2e 2059
Chapter 10 Solutions
Problem 10.1
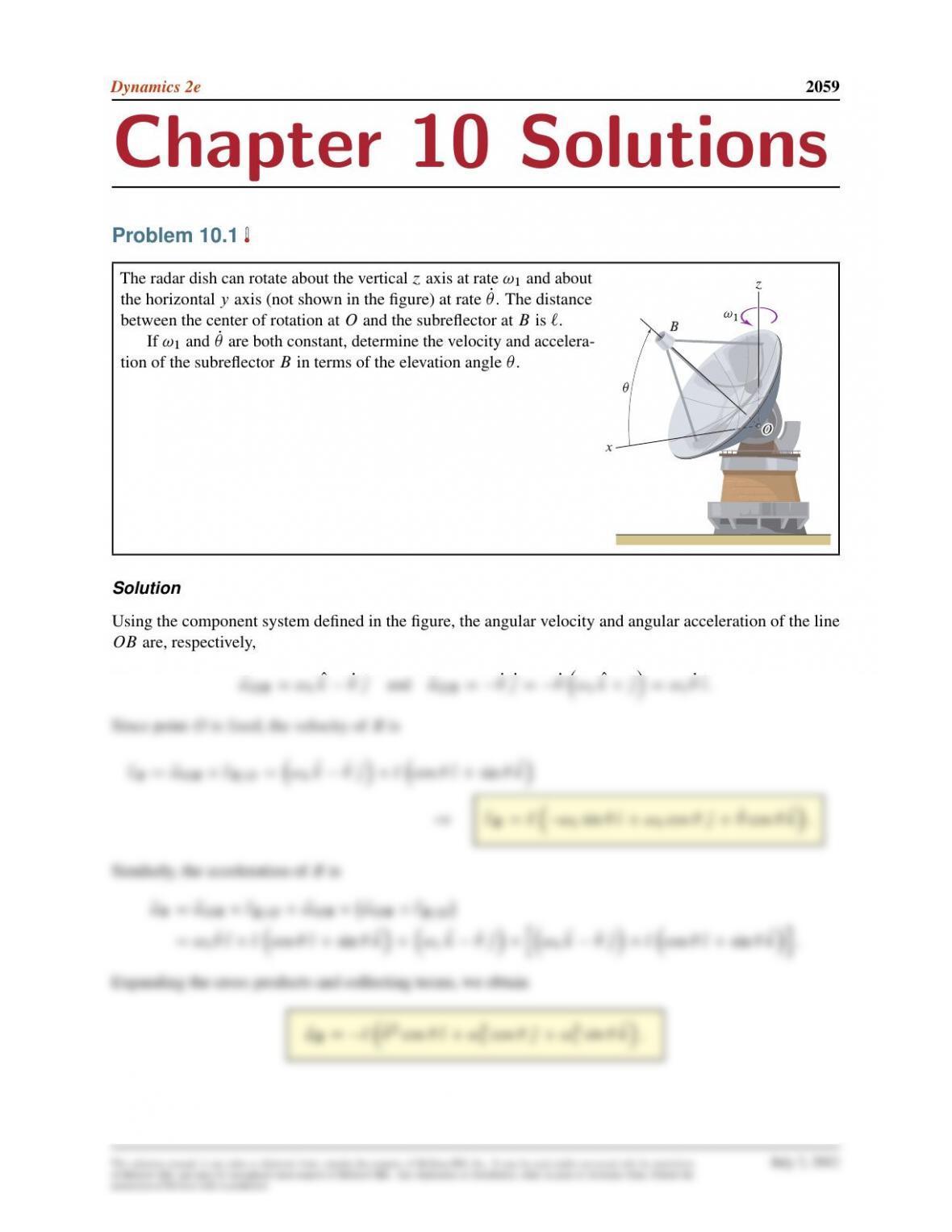
The radar dish can rotate about the vertical
´
axis at rate
!1
and about
the horizontal
y
axis (not shown in the figure) at rate
P
✓
. The distance
between the center of rotation at Oand the subreflector at Bis `.
If
!1
and
P
✓
are both constant, determine the velocity and accelera-
tion of the subreflector Bin terms of the elevation angle ✓.
Solution
Using the component system defined in the figure, the angular velocity and angular acceleration of the line
OB are, respectively,
E!OB D!1O
kP
✓O|and E˛OB DP
✓P
O|DP
✓⇣!1O
k⇥O|⌘D!1P
✓O{:

2060 Solutions Manual
Problem 10.2
The radar dish can rotate about the vertical
´
axis at rate
!1
and about
the horizontal
y
axis (not shown in the figure) at rate
P
✓
. The distance
between the center of rotation at Oand the subreflector at Bis `.
If
!1.t/
and
P
✓.t/
are known functions of time, determine the ve-
locity and acceleration of the subreflector
B
in terms of the elevation
angle ✓.
Solution
Using the component system defined in the figure, the angular velocity of the line OB is
E!OB D!1O
kP
✓O|;
and angular acceleration of the line OB is
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2061
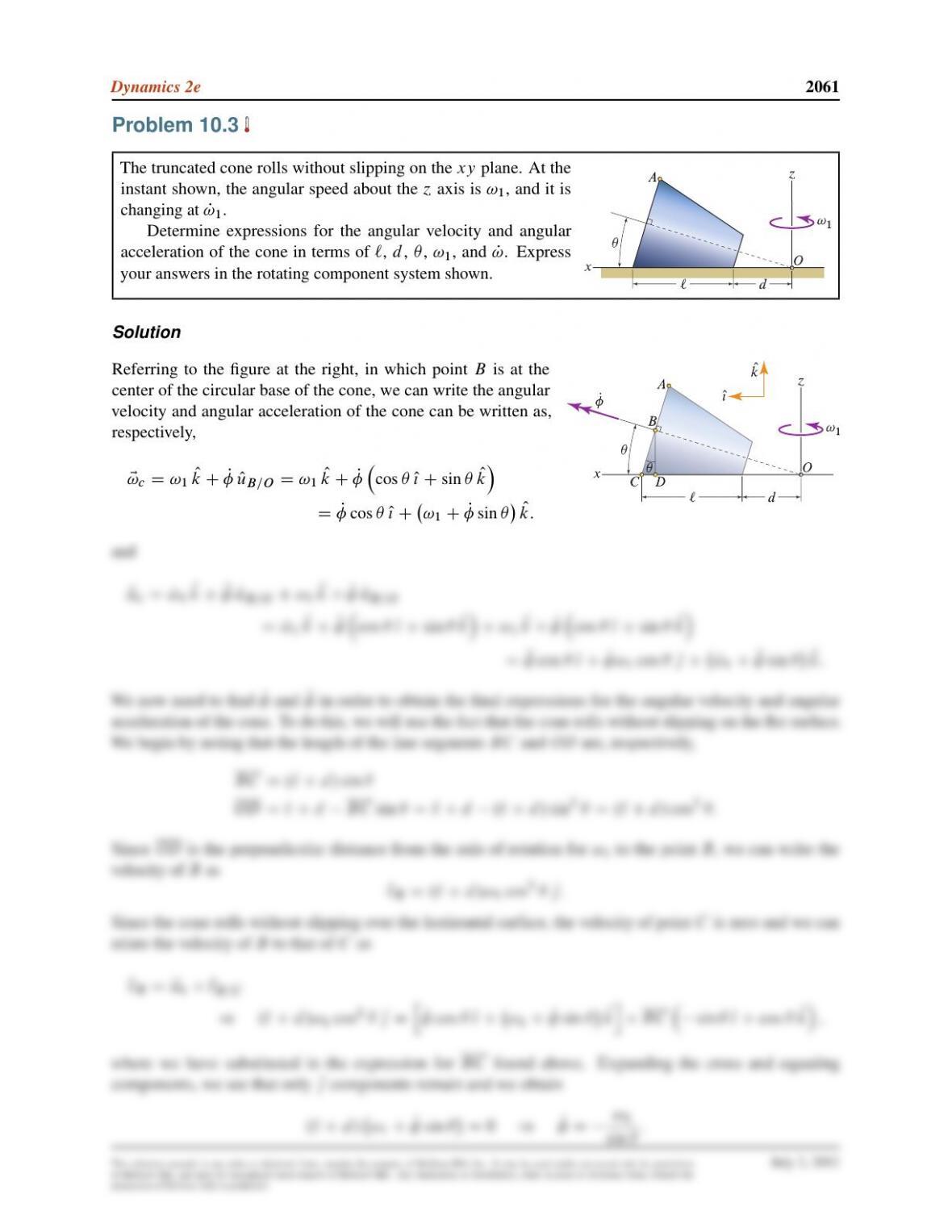
Problem 10.3
The truncated cone rolls without slipping on the
xy
plane. At the
instant shown, the angular speed about the
´
axis is
!1
, and it is
changing at P!1.
Determine expressions for the angular velocity and angular
acceleration of the cone in terms of
`
,
d
,
✓
,
!1
, and
P!
. Express
your answers in the rotating component system shown.
Solution
Referring to the figure at the right, in which point
B
is at the
center of the circular base of the cone, we can write the angular
velocity and angular acceleration of the cone can be written as,
respectively,
E!cD!1O
kCP
OuB=O D!1O
kCP
⇣cos ✓O{Csin ✓O
k⌘
DP
cos ✓O{C!1CP
sin ✓O
k:
and

2062 Solutions Manual
Substituting this result into the expression for E!cabove, we obtain
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2063
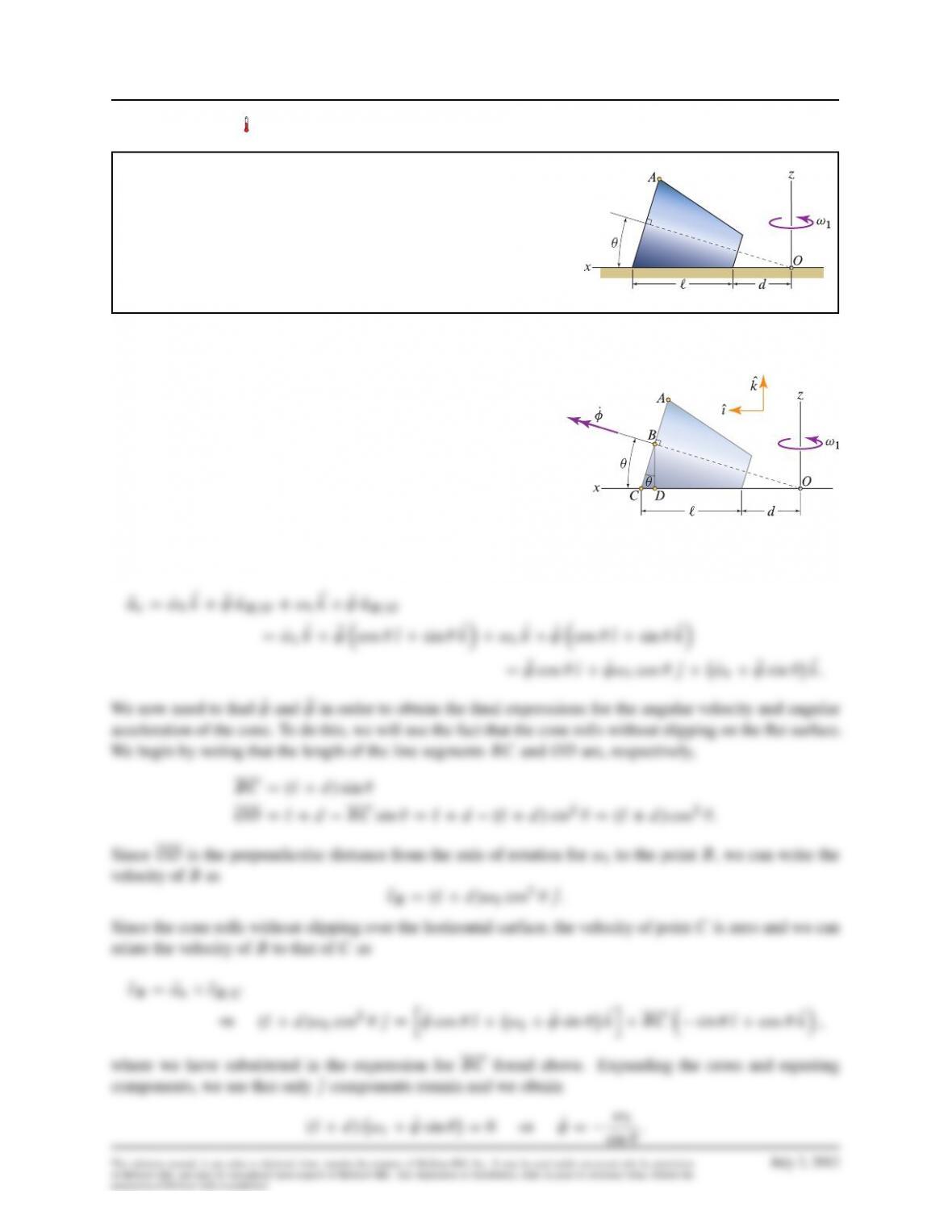
Problem 10.4
The truncated cone rolls without slipping on the
xy
plane. At the
instant shown, the angular speed about the
´
axis is
!1
, and it is
changing at P!1.
Determine expressions for the velocity and acceleration of the
point
A
, which is at the highest point on the cone at this instant, in
terms of
`
,
d
,
✓
,
!1
, and
P!
. Express your answers in the rotating
component system shown.
Solution
Referring to the figure at the right, in which point
B
is at the
center of the circular base of the cone, we can write the angular
velocity and angular acceleration of the cone can be written as,
respectively,
E!cD!1O
kCP
OuB=O D!1O
kCP
⇣cos ✓O{Csin ✓O
k⌘
DP
cos ✓O{C!1CP
sin ✓O
k:
and
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2064 Solutions Manual
Substituting this result into the expression for E!cabove, we obtain
E!cD!1cot ✓O{:
Now that we have the angular velocity of the cone, we can find the velocity of
A
by relating it to the velocity
of Cusing
EvADE!c⇥ErA=C D!1cot ✓O{⇥2.` Cd/sin ✓⇣sin ✓O{Ccos ✓O
k⌘
) EvAD2.` Cd /!1cos2✓;
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2065
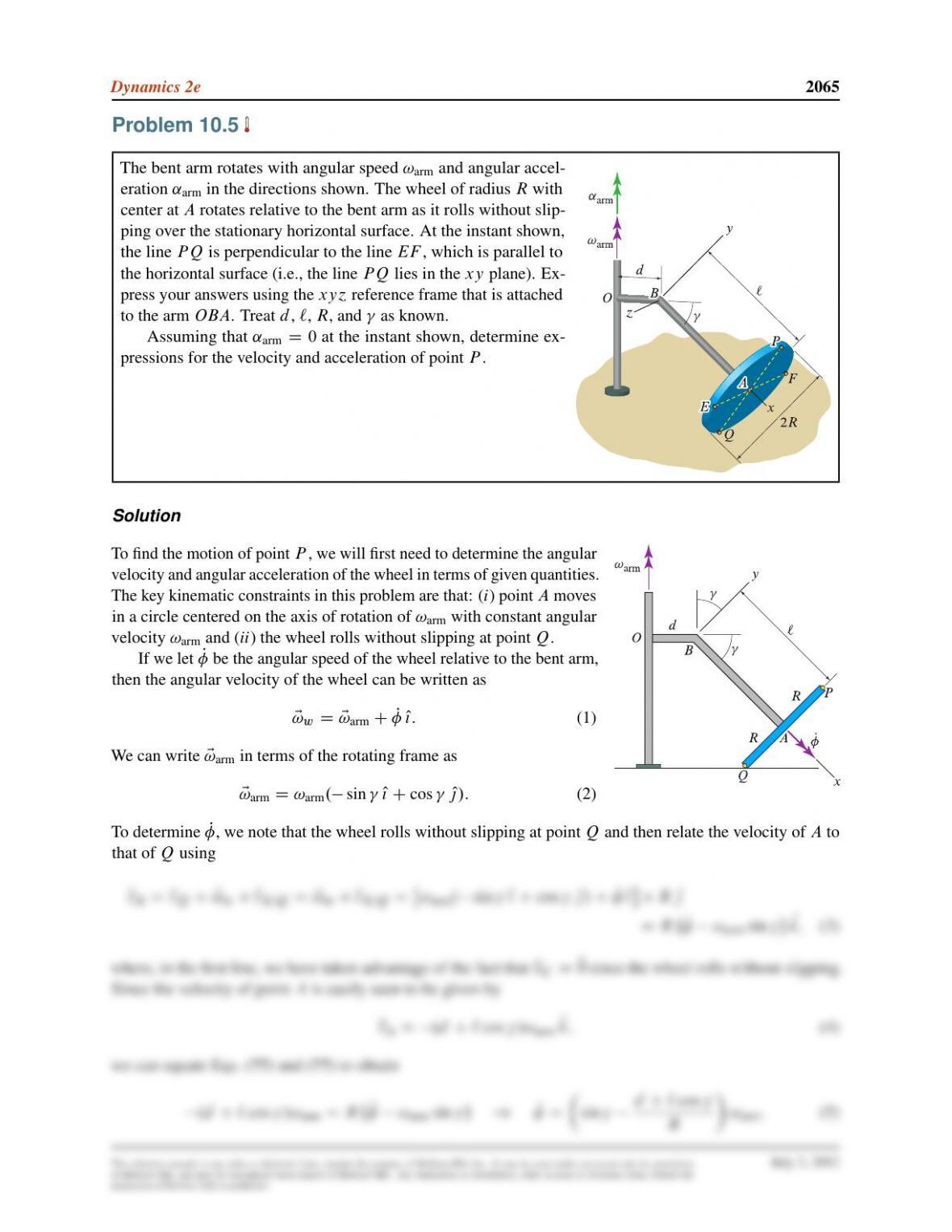
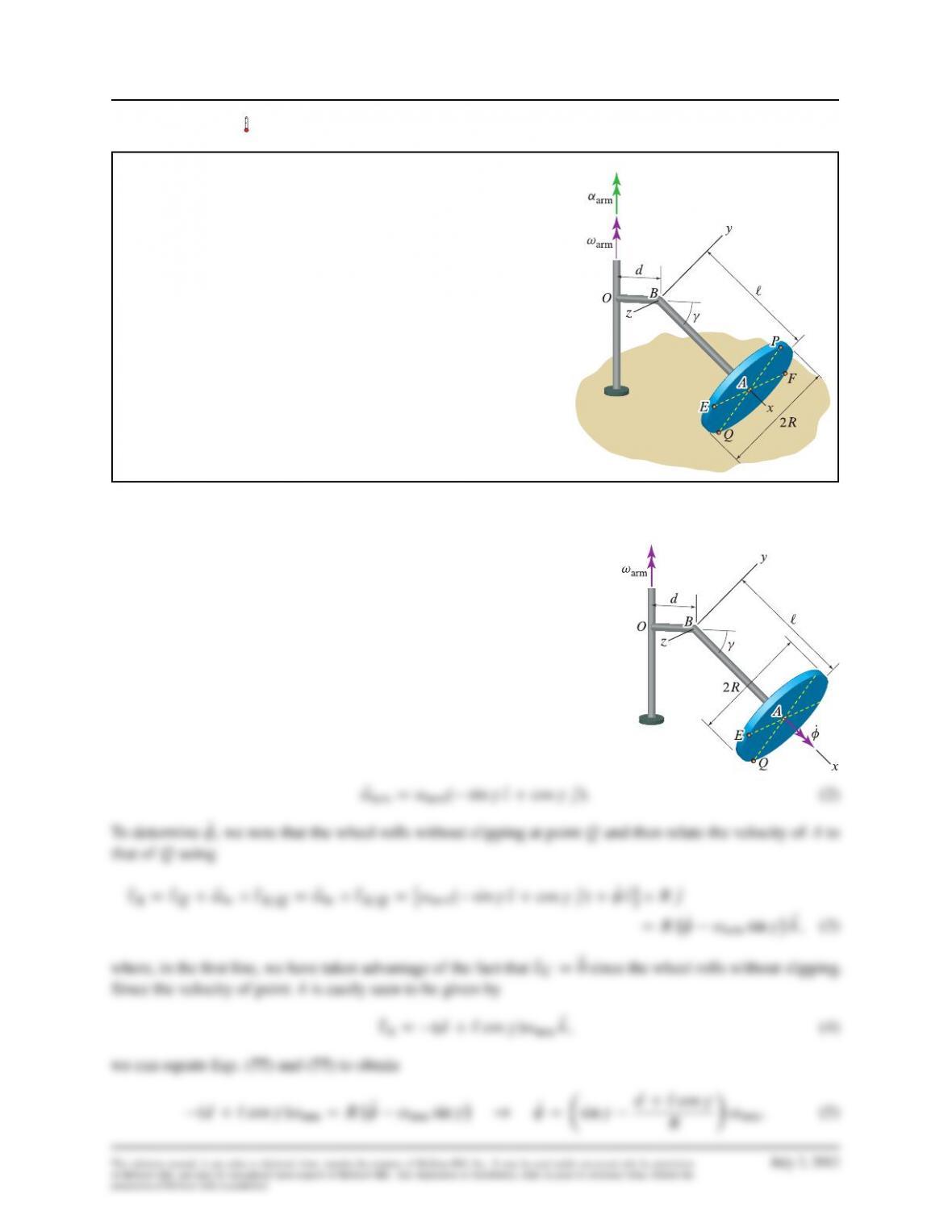
Problem 10.5
The bent arm rotates with angular speed
!arm
and angular accel-
eration
˛arm
in the directions shown. The wheel of radius
R
with
center at
A
rotates relative to the bent arm as it rolls without slip-
ping over the stationary horizontal surface. At the instant shown,
the line
PQ
is perpendicular to the line
EF
, which is parallel to
the horizontal surface (i.e., the line
PQ
lies in the
xy
plane). Ex-
press your answers using the
xy´
reference frame that is attached
to the arm OBA. Treat d,`,R, and as known.
Assuming that
˛arm D0
at the instant shown, determine ex-
pressions for the velocity and acceleration of point P.
Solution
To find the motion of point
P
, we will first need to determine the angular
velocity and angular acceleration of the wheel in terms of given quantities.
The key kinematic constraints in this problem are that: (i) point
A
moves
in a circle centered on the axis of rotation of
!arm
with constant angular
velocity !arm and (ii) the wheel rolls without slipping at point Q.
If we let
P
be the angular speed of the wheel relative to the bent arm,
then the angular velocity of the wheel can be written as
E!wDE!arm CP
O{: (1)
We can write E!arm in terms of the rotating frame as
E!arm D!arm.sin O{Ccos O|/: (2)
To determine
P
, we note that the wheel rolls without slipping at point
Q
and then relate the velocity of
A
to
that of Qusing
EvADEvQCE!w⇥ErA=Q DE!w⇥ErA=Q D⇥!arm.sin O{Ccos O|/ CP
O{⇤⇥RO|
DRP
!arm sin O
k; (3)

2066 Solutions Manual
Substituting Eqs. (??) and (??) into Eq. (??), we obtain the angular velocity of the wheel as
E!wD!arm.sin O{Ccos O|/C✓sin dC`cos
R◆!arm O{D!arm ✓dC`cos
RO{Ccos O|◆:
We can now find the velocity of point
P
by relating it to the velocity of
A
, which we already have from
Eq. (??), that is
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.
Dynamics 2e 2067
Problem 10.6
The bent arm rotates with angular speed
!arm
and angular accel-
eration
˛arm
in the directions shown. The wheel of radius
R
with
center at
A
rotates relative to the bent arm as it rolls without slip-
ping over the stationary horizontal surface. At the instant shown,
the line
PQ
is perpendicular to the line
EF
, which is parallel to
the horizontal surface (i.e., the line
PQ
lies in the
xy
plane). Ex-
press your answers using the
xy´
reference frame that is attached
to the arm OBA. Treat d,`,R, and as known.
Assuming that
˛arm D0
at the instant shown, determine ex-
pressions for the velocity and acceleration of point E.
Solution
To find the motion of point
E
, we will first need to determine the angular
velocity and angular acceleration of the wheel in terms of given quantities.
The key kinematic constraints in this problem are that: (i) point
A
moves
in a circle centered on the axis of rotation of
!arm
with constant angular
velocity !arm and (ii) the wheel rolls without slipping at point Q.
If we let
P
be the angular speed of the wheel relative to the bent arm,
then the angular velocity of the wheel can be written as
E!wDE!arm CP
O{: (1)
We can write E!arm in terms of the rotating frame as
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.

2068 Solutions Manual
Substituting Eqs. (??) and (??) into Eq. (??), we obtain the angular velocity of the wheel as
E!wD!arm.sin O{Ccos O|/C✓sin dC`cos
R◆!arm O{D!arm ✓dC`cos
RO{Ccos O|◆:
We can now find the velocity of point
E
by relating it to the velocity of
A
, which we already have from
Eq. (??), that is
EvEDEvACE!w⇥ErE=A
D.d C`cos /!arm O
kC!arm ✓sin dC`cos
R◆O{C.sin O{Ccos O|/⇥RO
k;
) EvEDR!arm cos O{C.d C`cos /!arm O|.d C`cos /!arm O
k.
To find the angular acceleration of the wheel, we apply Eq. (10.6) in the form
E˛wDP!wx O{CP!wy O|CP!w´ O
kCE
˝⇥E!w;
where
E
˝DE!arm
is the angular velocity of the rotating frame. Since all dimensions as well as
!arm
are
constant, we can say that P!wx DP!wy DP!w´ D0and so
of McGraw-Hill, and must be surrendered upon request of McGraw-Hill. Any duplication or distribution, either in print or electronic form, without the
permission of McGraw-Hill, is prohibited.