Statics 2e 93
Problem 2.46
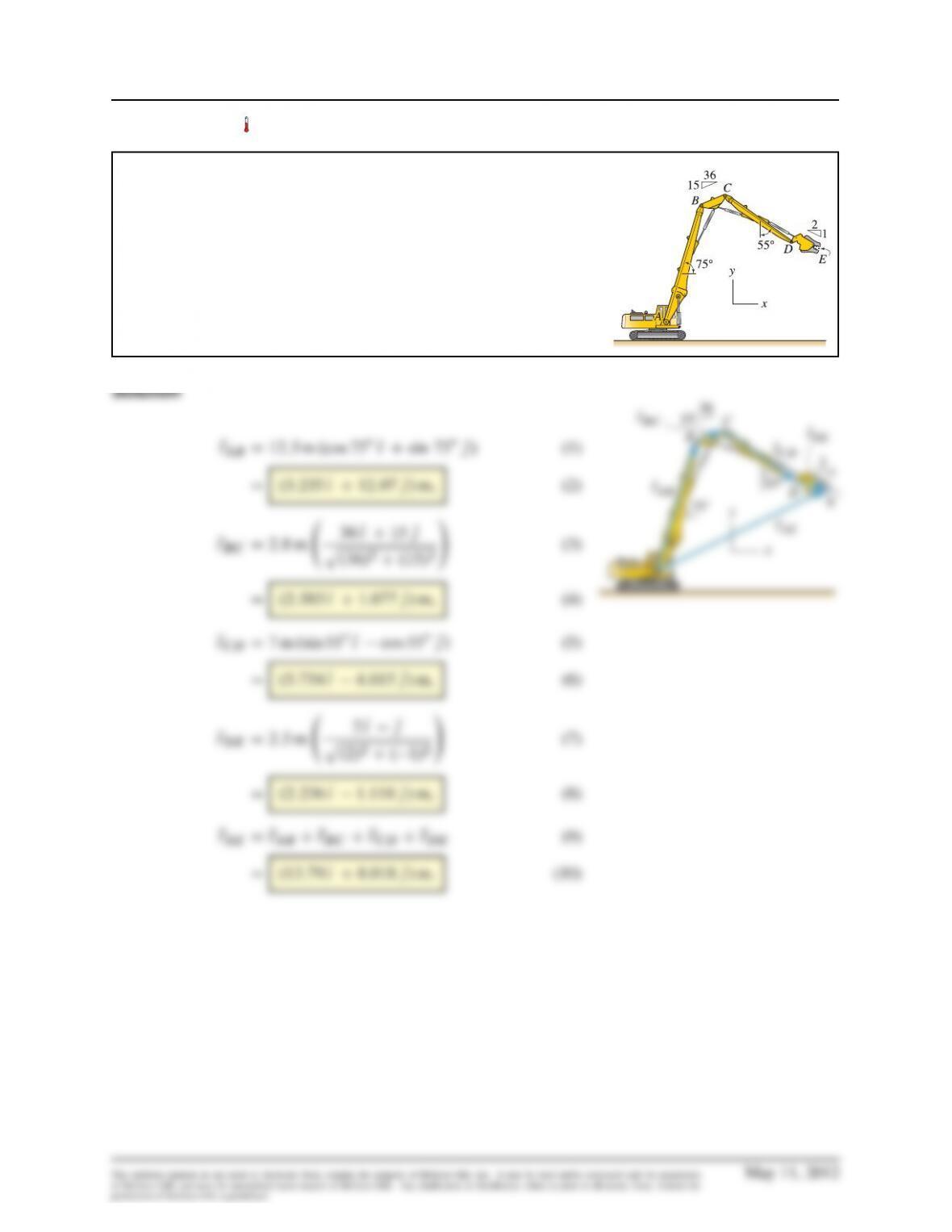
A Caterpillar Ultra High Demolition machine is shown. The distances
between points
A
and
B
is
12:5
m, points
B
and
C
is
2:8
m,
C
and
D
is
7
m, and
D
and
E
is
2:5
m. Determine the position vectors
ErAB
,
ErBC
,
ErCD
, and
ErDE
, where
ErAB
is the position vector from point
A
to point
B, and so on. Add these vectors to determine the position vector ErAE .
Problem 2.47
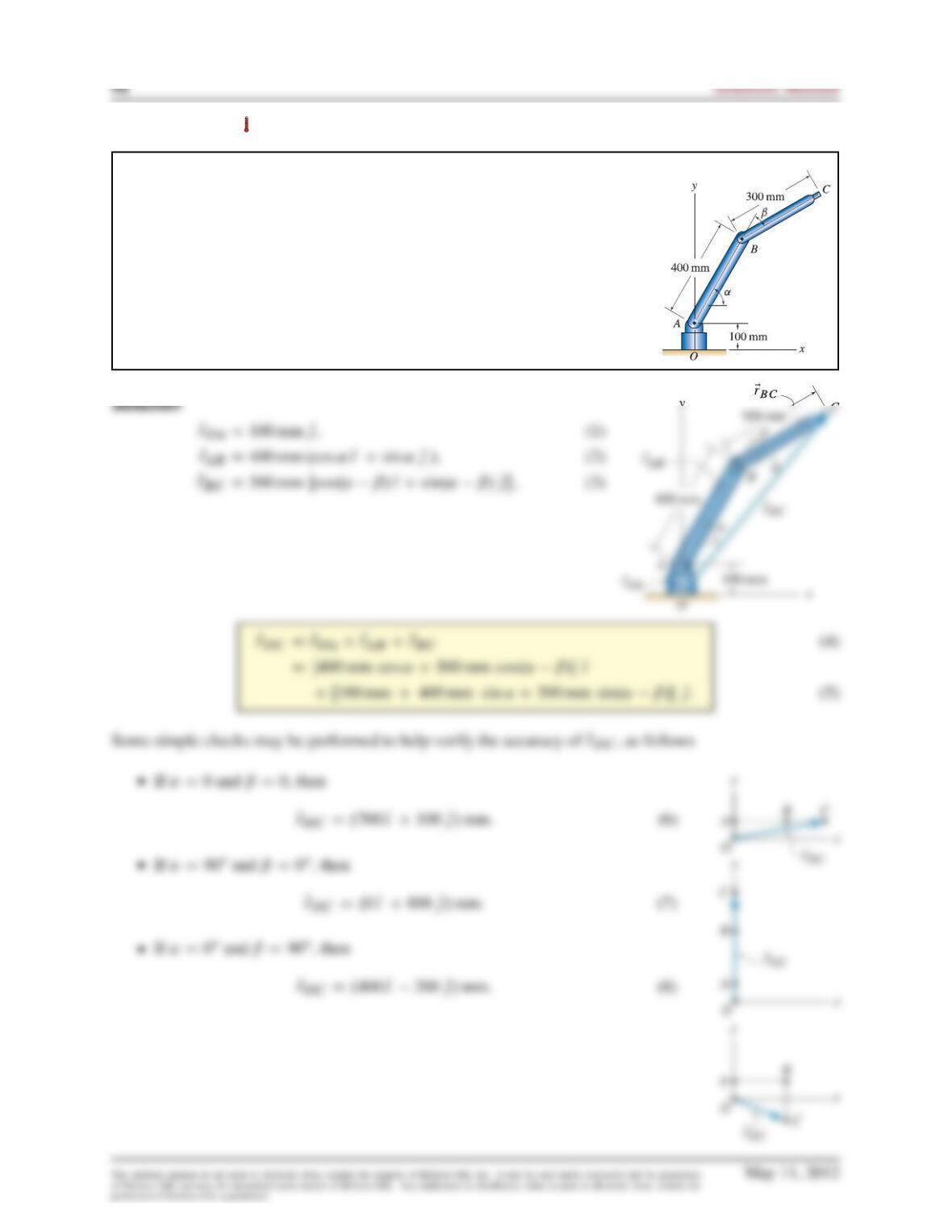
The actuator at point
C
of the robotic arm is positioned by specifying angles
˛
and
ˇ
, where
˛
is measured positive counterclockwise from the positive
x
axis and
ˇ
is measured positive clockwise from the
AB
direction to the
BC
direction. Determine the position vector from point
O
to point
C
in terms of
angles ˛and ˇ.

Problem 2.48
Two ropes are used to lift a pipe in a congested region. Determine the ratio
F2=F1so that the resultant of E
F1and E
F2is vertical.

Problem 2.49
A welded steel tab is subjected to forces
F
and
P
. Determine the largest value
P
may have if
FD1000 lb
and the magnitude of the resultant force cannot
exceed 1500 lb.
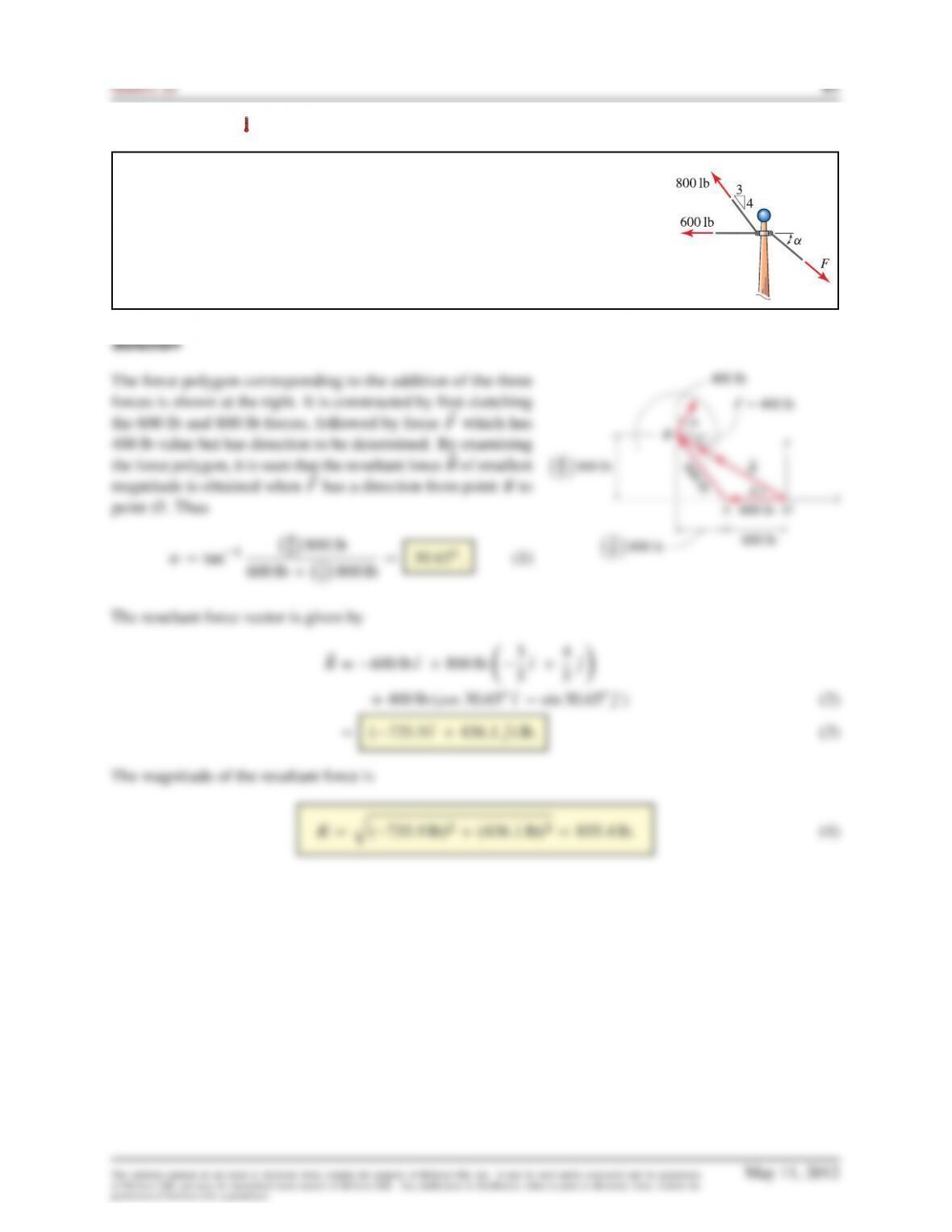
Problem 2.50
The mast of a ship supports forces from three cables as shown. If
FD400 lb
,
determine the value of
˛
that minimizes the magnitude of the resultant of the
three forces. Also, determine the magnitude of that resultant.
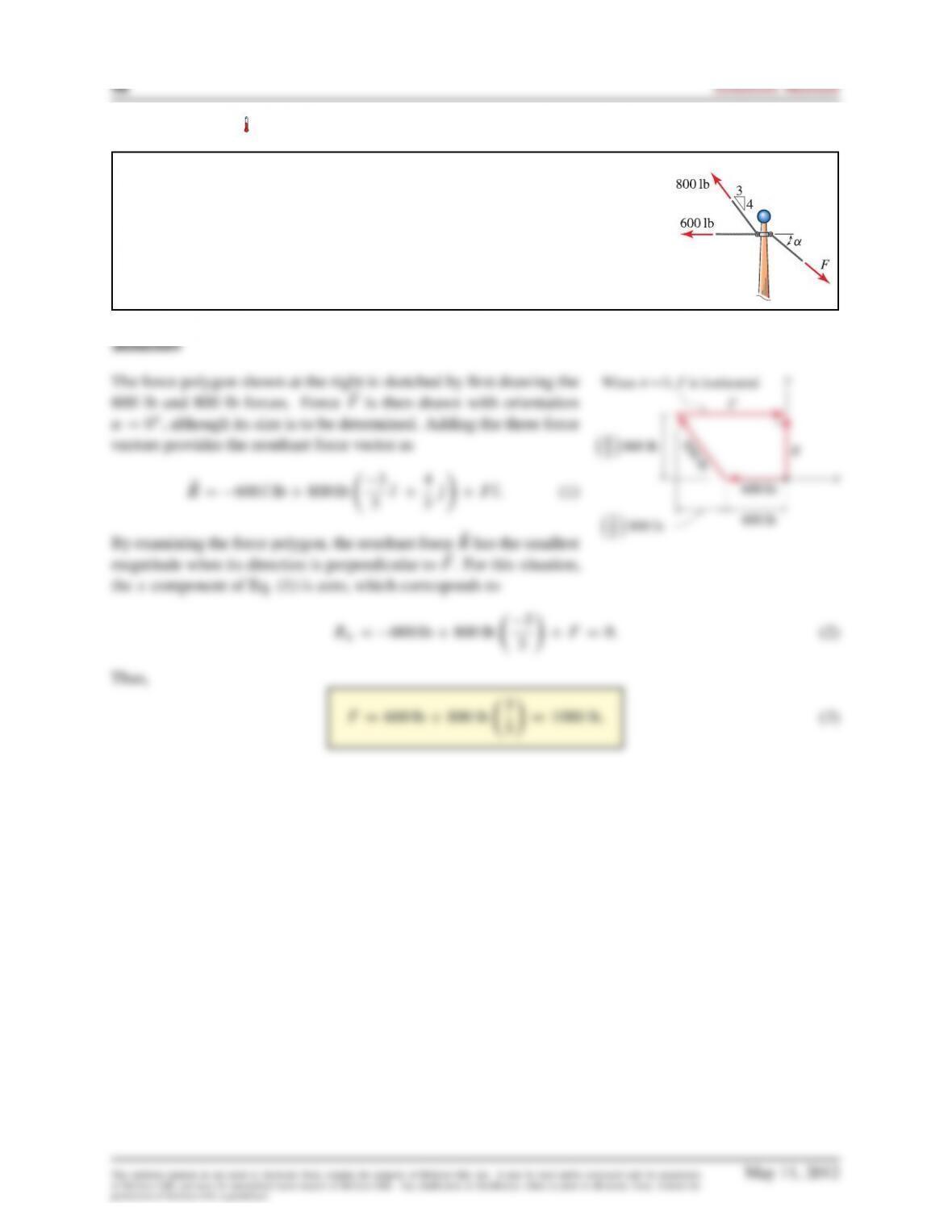
Problem 2.51
The mast of a ship supports forces from three cables as shown. If
˛D0ı
,
determine the value of
F
that will make the magnitude of the resultant of the
three forces smallest.

Problem 2.52
A short cantilever beam is subjected to three forces. If
FD8kN
, determine
the value of
˛
that minimizes the magnitude of the resultant of the three forces.
Also, determine the magnitude of that resultant.

Problem 2.53
A short cantilever beam is subjected to three forces. If
˛D45ı
, determine the
value of
F
that will make the magnitude of the resultant of the three forces
smallest.

Problem 2.54
An eyebolt is loaded by forces
F1
and
F2
. If the eyebolt has a maximum
working load of 1200 lb, determine if the working load multipliers given in
Fig. 1 of Example 2.6 are met for the following loading scenarios:
(a) Only F1is applied.
(b) Only F2is applied.
(c) Both F1and F2are applied simultaneously.


Problem 2.55
An important and useful property of vectors is they may be easily transformed
from one Cartesian coordinate system to another. That is, if the
x
and
y
compo-
nents of a vector are known, the
t
and
n
components can be found (or vice versa)
by applying the formulas
EvDvxO{CvyO|DvtO
tCvnOn; (1)
where vtDvxcos Cvysin ; (2)
vnD vxsin Cvycos ; (3)
or vxDvtcos vnsin ; (4)
vyDvtsin Cvncos : (5)
In these equations,
O
t
and
On
are unit vectors in the
t
and
n
directions, respectively;
is measured positive counterclockwise from the positive
x
direction to the positive
t
direction; and the
y
and
n
directions must be oriented
90ı
counterclockwise
from the positive xand tdirections, respectively.
(a)
Derive the above transformation that gives
vt
and
vn
in terms of
vx
and
vy
.
Hint: First consider a vector
Evx
that acts in the
x
direction, and resolve this
into components in
t
and
n
directions. Then consider a vector
Evy
that acts
in the
y
direction, and resolve this into components in
t
and
n
directions.
Vectorially adding these results yields the transformation.
(b)
For the eyebolt and post of Example 2.7, the
x
and
y
components of the
resultant force are given by Eq. (4) of Example 2.6. Use these
x
and
y
components with the preceeding transformation equations to obtain the
t
and
n
components of the resultant force, and verify these are the same as
those in Eq. (4) of Example 2.7.


Problem 2.56
A box weighing
200
N rests on an inclined surface. A worker applies a hori-
zontal force
F
to help position the box. Determine the
x
and
y
components of
the resultant of forces
W
and
F
. Also determine the
t
and
n
components of
the resultant force vector. Comment on why the
t
and
n
components might be
useful to know.

Problem 2.57
A motor-driven gear is used to produce forces
P1
and
P2
in members
AB
and
AC of a machine. Member AC is parallel to the yaxis.
(a)
Determine the
x
and
y
components of the resultant force vector at
A
due
to forces P1and P2.
(b)
Determine the
t
and
n
components of the resultant force vector. Comment
on why the tand ncomponents might be useful to know.
Solution

Problem 2.58
Traction is a medical procedure used to treat muscle and skeletal disorders by
strategically applying one or more forces to a person’s body for a specific length
of time.
(a)
Determine the
x
and
y
components of the resultant force vector at
A
due
to the 40 N and 60 N forces.
(b) Determine the tand ncomponents of the resultant force vector.
Solution
Part (a)

Problem 2.59
A structure supports forces from a bar and cable as shown.
(a)
Determine the
x
and
y
components of the resultant force vector at
A
due
to the 6kip and 10 kip forces.
(b) Determine the tand ncomponents of the resultant force vector.
Solution

Problem 2.60
Two people apply forces P1and P2to the handle of a wrench as shown.
(a)
Determine the
x
and
y
components of the resultant force vector applied
to the handle of the wrench.
(b)
Determine the
t
and
n
components of the resultant force vector. Comment
on why the tand ncomponents might be useful to know.

Problem 2.61
Bar
AC
is straight and has 106 in. length,
B
is a pulley that supports forces
W
and
F,Wis vertical, and the tdirection is parallel to bar AC:
(a)
If
FD150 lb
and
˛D30ı
, determine the coordinates of point
C
so that the
t
component of the resultant of Fand Wis zero.
(b)
If
FD150 lb
and
C
is located at
.56; 90/ in.
, determine angle
˛
so that the
t
component of the resultant of Fand Wis zero.
(c)
If
C
is located at
.56; 90/ in.
and
˛D30ı
, determine
F
so that the
t
component
of the resultant of Fand Wis zero.
Hint: For each of these questions, first find the
x
and
y
components of the resultant
force and then use the transformation given in Prob. 2.55 to obtain the tcomponent.

Statics 2e 111
2
0
-2
-4
1◦2◦4◦
3◦
Rt(lb)
α
α≈2.584◦
Using vector transformation (Eq. (2) in Prob. 2.55 with
DD
58:11ı
), the component of the resultant force in the
t
direction, which
is zero according to the problem statement, is
RtD.150 lb/.cos ˛/.cos 58:11ı/
C.150 lb sin ˛100 lb/.sin 58:11ı/D0; (10)
Equation (10) has one unknown, namely
˛
, and the equation may
be solved using computer algebra software (e.g., Mathematica or
Maple), by trial and error, or by simply plotting Rtversus ˛, as shown at the right. In this plot, the location
where RtD0corresponds to
˛D2:58ı:(11)
Part (c)
With point
C
located at
.56; 90/ in.
, the orientation
of the bar is given by Eq. (6), namely
D58:11ı. The resultant of E
Fand E
Wis given by
E
RD.100 lb/O|CF .cos 30ıO{Csin 30ıO|/ (12)
DFcos 30ıO{C.F sin 30ı100 lb/O|(13)
DRxO{CRyO| : (14)
Using vector transformation (Eq. (2) in Prob. 2.55 with
DD58:11ı
), the component of the resultant
force in the tdirection, which is zero according to the problem statement, is
RtDF .cos 30ı/.cos 58:11ı/C.F sin 30ı100 lb/.sin 58:11ı/D0: (15)
Solving Eq. (15) for F, we find that
F.cos 30ı/.cos 58:11ı/C.sin 30ı/.sin 58:11ı/D.100 lb/.sin 58:11ı/)FD96:3 lb (16)

Problem 2.62
Screw
AC
is used to position point
D
of a machine. Points
A
and
C
have
coordinates
.185; 0/ mm
and
.125; 144/ mm
, respectively, and are fixed in space
by the bearings that support the screw. If point
B
is
52 mm
from point
A
,
determine the position vector ErAB and the coordinates of point B.
Solution