53
1. For detection of m1, we treat m2as a RV taking 1 or 2 with equal probability. The detection
rule is
arg max
s1∈{−1,1}
pn1(r1−s1−α)pn2(r2−β) + pn1(r1−s1+α)pn2(r2+β)
similarly for detection of m2we have
(s21,s22)∈{(α,β),(−α,−β)}
These relations reduce to
D+1 ⇔e
2r1
N0cosh 2αr1−2α+ 2βr2
N0> e−2r1
N0cosh 2αr1+ 2α+ 2βr2
N0
2. This case easy and straightforward. We have four equiprobable signals whose coordinates are
3. The “real” optimal detector is the one designed in part 1, since it minimizes each error
probability individually. However, it has a more complex structure due to nonlinear relations
that define the decision boundaries.

4. This is an example of a communication situation that even in the binary case one cannot
derive a closed form expression for the error probability. In case 2 we cannot find a closed
Problem 4.52
M
2. Let the origin be at √Ethen the error probability is P[(n1, n2)∈shaded area]. In polar
coordinates r=pn2
1+n2
2and φ= arctan n2
n1are independent with Rayleigh and uniform on
[0,2π] distributions.
r
σ2r > 0,0≤φ < 2π
Problem 4.53

55
1. We have to look for arg maxmp(r1,r2|sm) = arg maxmpn1(r1−sm)pn2(r2−sm) by the
independence of the noise processes. This reduces to arg maxmexp −|r1−sm|2
N01 −|r2−sm|2
N02 or
4. Here we are dealing with a one dimensional case and comparing
r1
N01
+r2
N02 pEm−Em
21
N01
+1
N02 >0
5. Of course α= 1 and rth =√Em. The detection rule is r1+r2>√Em. An error occurs
when n1+n2>√Em. But n1+n2is Gaussian with variance N0, hence Pe=QqEm
Problem 4.54
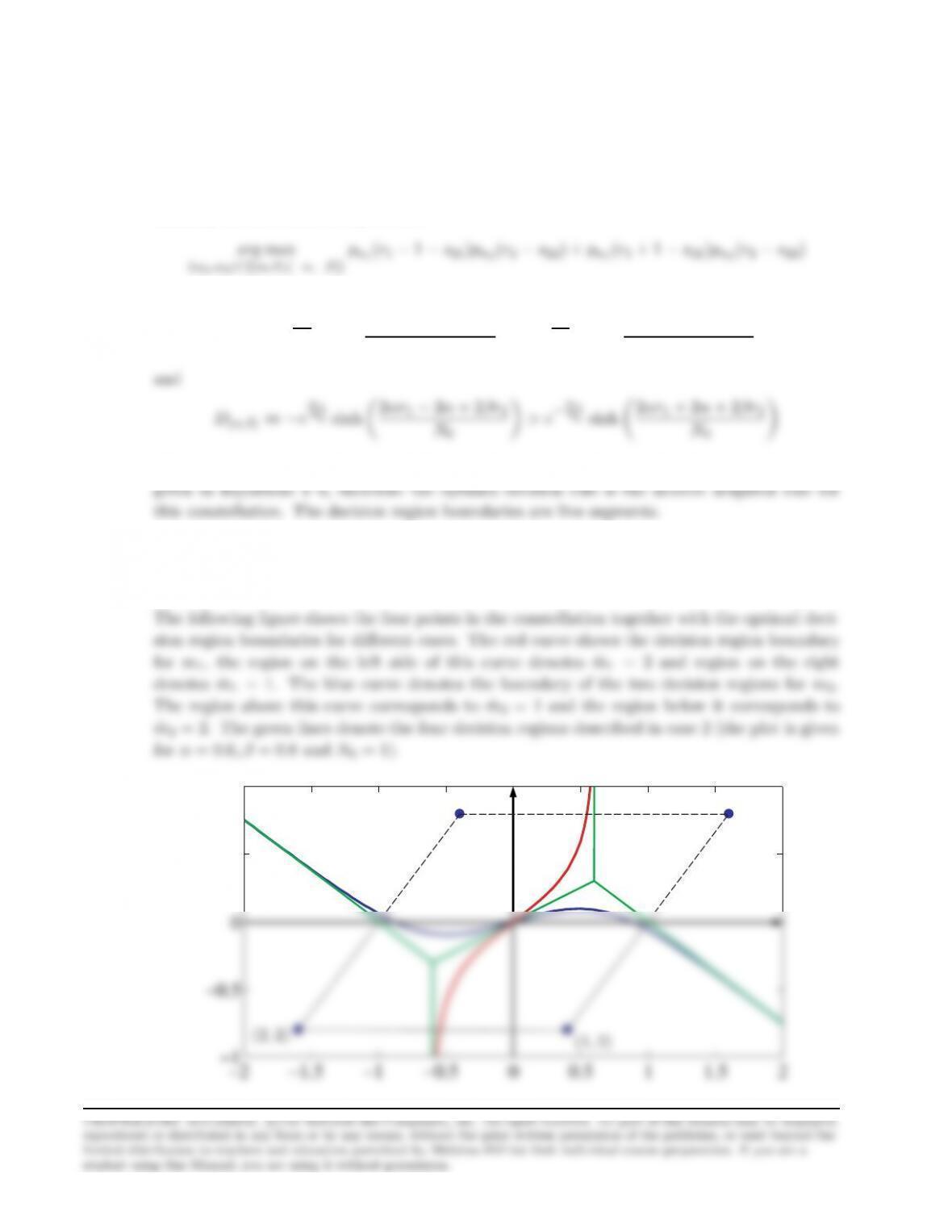
1. Since the two intervals are non-overlapping we can use two basis for representation of the
signal in the two intervals, the vector representation of the received signal will be (r1, r2) =
0
0
or
Z∞
0
e−(r1−1)2+(r2−a)2
N0e−ada > Z∞
0
e−(r1+1)2+(r2+a)2
N0e−ada

2. Since the amplitude of the multipath link is always positive, it always helps the decision. In
fact the system with multipath as described above cannot perform worse than the system
Problem 4.55
2. In this case the two signals are multiplied by √2 cos(2πfct+θ) by the demodulator and then
passed through a LPF (the √2 factor is introduced to keep energy intact). The output of the
Pb=Q cos θr2Eb
N0!
Problem 4.56
1. A change of variable of the form yi=Rxi, 1 ≤i≤nshows taht
Vn(R) = ZZ…
Z
dx1dx2. . . dxn=RnZZ…
Z
dy1dy2. . . dyn=BnRn

2. Note that
p(y) = 1
(2π)n/2e−kyk2
2
3. By spherical symmetry of the PDF p(y) is a function of the length of the vector yand not the
5. This follows directly from part 4 and
0
6. We introduce the change of variable u=r2/2, from which r dr =du and hence rn−1dr =
2n
2−1un
2−1du, hence
Using the result of part 5, we have
Problem 4.57

58
It is clear that dmin(C) = 1 and by 4.7-25,
Eavg/2D≈2
nV (R)ZRkxk2dx
=2
…ZL/2
(x2
1+x2
2+. . . x2
n)dx1dx2. . . dxn
n
X
6
3. From 4.7-40, we have
γs(R) = n[V(R)]1+ 2
n
12 RRkxk2dx
n
Problem 4.58
v(t) = Pk[Iku(t−2kTb) + jJku(t−2kTb−Tb)] where u(t) =
sin πt
2Tb,0≤t≤Tb
0,o.w.
.Note
2Tb
2Tb
Hence, v(t) may be expressed as :

59
The transmitted signal is :
kIksin π(t−2kTb)
2Tb
2Tb
1.
✍✌
✎☞
✎☞
✲ ✲ ✲ ✲
✻
Threshold
Detector
Sampler
t= (2k+ 2)Tb
XR(2k+2)Tb
2kTb()dt
ˆ
Ik
sin π
2Tbcos2πfct
Threshold
t= (2k+ 2)Tb
cos π
2Tbsin2πfct
Input
2. The offset QPSK signal is equivalent to two independent binary PSK systems. Hence for
coherent detection, the error probability is :
3. Viterbi decoding (MLSE) of the MSK signal yields identical performance to that of part (2).
4. MSK is basically binary FSK with frequency separation of ∆f= 1/2T. For this frequency
separation the binary signals are orthogonal with coherent detection. Consequently, the error

Problem 4.59
1. For nrepeaters in cascade, the probability of iout of nrepeaters to produce an error is given
by the binomial distribution
Pi=
n
i
pi(1 −p)n−i
However, there is a bit error at the output of the terminal receiver only when an odd number of
repeaters produces an error. Hence, the overall probability of error is
i=odd
n
i
Let Peven be the probability that an even number of repeaters produces an error. Then
i=even
n
i
and therefore,
Peven +Podd =
n
X
i=0
n
i
pi(1 −p)n−i= (p+ 1 −p)n= 1
where the equality (a) follows from the fact that (−1)iis 1 for ieven and −1 when iis odd. Solving
the system
2. Expanding the quantity (1 −2p)n, we obtain

61
Since, p≪1 we can ignore all the powers of pwhich are greater than one. Hence,
Problem 4.60
The overall probability of error is approximated by (see 5-5-2)
P(e) = KQ “r2Eb
N0#
Problem 4.61
1. The antenna gain for a parabolic antenna of diameter Dis :
GR=ηπD
λ2
2. The effective radiated power is :

3. The received power is :
PR=PTGTGR
4πd
λ2= 2.995 ×10−9=−85.23 dB = −55.23 dBm
Problem 4.62
1. The antenna gain for a parabolic antenna of diameter Dis :
GR=ηπD
λ2
If we assume that the efficiency factor is 0.5, then with :
2. The effective radiated power is :
3. The received power is :
Problem 4.63
The wavelength of the transmitted signal is:

63
The gain of the parabolic antenna is:
λ2
0.032
The received power at the output of the receiver antenna is:
Problem 4.64
1. Since T= 3000K, it follows that
If we assume that the receiving antenna has an efficiency η= 0.5, then its gain is given by :
λ2
3×108
2×109!2
Hence, the received power level is :
2. If Eb
N0= 10 dB = 10, then
Problem 4.65
The wavelength of the transmission is :

64
If 1 MHz is the passband bandwidth, then the rate of binary transmission is Rb=W= 106bps.
Hence, with N0= 4.1×10−21 W/Hz we obtain :
N0
N0
The transmitted power is related to the received power through the relation (see 5-5-6) :