
41
hence,
D1⇔Z1
e−(r1−2A)2+(r2−2)2
N0dA > Z1
e−(r1+2A)2+(r2+2)2
N0dA
4r2
N0Z1
N0dA > e−4r2
N0Z1
N0dA
g(r) = Z1
0
e−4A2+4rA
Problem 4.42
1. This is binary equiprobable antipodal signaling, hence the threshold is zero and Pe=P(n >
2. Intuitively, it is obvious that in this case no information is transmitted and therefore any
decision at the receiver is irrelevant. To make this statement more precise, we make a decision
3. When ρ= 0 no information is transmitted and any decision is irrelevant. When ρ= 1, the
threshold is zero, thus we can take the threshold to be zero regardless of the value of ρ(which
4. This is like part 3 but with decision on favor of Awhen 1/2p(y|A, ρ = 1) + 1/2p(y|A, ρ =
−1) >1/2p(y|0, ρ = 1) + 1/2p(y|0, ρ =−1) resulting in
Problem 4.43
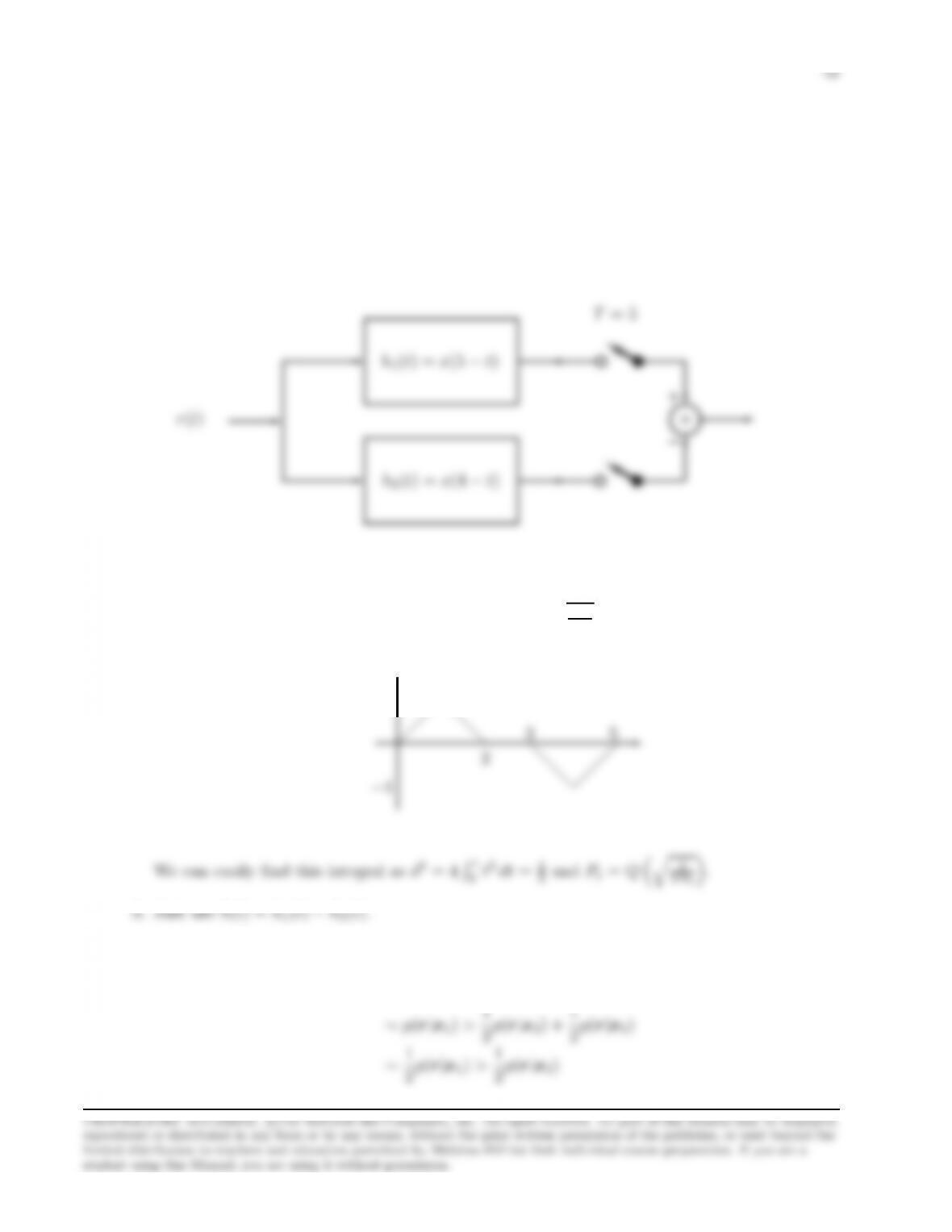
1. We have equiprobable and equal energy signaling, therefore η1=η2and the decision region
D1is given by
D1={r:r·s1>r·s2}
+
+
−
r(t)
h1(t) = x(5 −t)
h2(t) = x(4 −t)
T= 5
The sign of the output determines the message.
2. This is binary, equiprobable signaling, hence pe=Qqd2
2N0, where d2=R(s1(t)−s2(t))2dt.
It is easy to see that s1(t)−s2(t) is as shown below
✻
❅❅❅❅❅
1
s1(t)−s2(t)
4. Here we have
D1⇔p(r|m1)> p(r|m2)

43
where x1and x2are vector representations for x(t) and x(t−1). This means that the decision
Problem 4.44
1. Using the definition of Q-function Q(x) = R∞
x
1
√2πe−t2
2dt we have
E[Q(βX)] = Z∞
0
Q(βx)x
σ2e−x2
2σ2dx
01
βx
σ2e−x2
where the region of integration is 0 ≤x < ∞and βx ≤t < ∞. Reordering integrals we have
E[Q(βX)] = Z∞
0
1
√2πe−t2
2“Zt
β
0
x
σ2e−x2
2σ2dx#dt
2. This is similar to case 1 with β=q2Eb
N0, therefore
u
u
t
σ22Eb
N0

3. Obviously here
2
u
u
σ2Eb
1 + σ2Eb
N0
4. Note that for σ2Eb
N0≫1, we have
v
u
u
t
σ22Eb
N0
1 + σ22Eb
N0
=s1−1
1 + σ22Eb
N0
5. We have
Ehe−βX2i=Z∞
e−βx2x
2σ2dx
x
probability for noncoherent detection of BFSK is Pb=1
2e−Eb
2N0and for binary DPSK is
Pb=1
2e−Eb
N0. If we have Rayleigh attenuation as in part 2, we can substitute β=Eb
2N0and
β=Eb
N0and obtain
2+SNR ≈1
SNR noncoherent BFSK

Problem 4.45
Here the noise is not Gaussian, therefore none of the results of Gaussian noise can be used. We
start from the MAP rule
D1={r:p(s1|r)> p(s2|r)}
If r1, r2>1, then D1={r:r1+ 1 + r2+ 1 > r1−1 + r2−1}which is always satisfied. Therefore
the entire r1, r2>1 region belongs to D1. Similarly it can be shown that the entire r1, r2<−1
D1
D2
(1,-1)
(-1,1)
Problem 4.46
The vector r= [r1, r2] at the output of the integrators is

46
If s1(t) is transmitted, then
Z1.5
0
r(t)dt =Z1.5
0
[s1(t) + n(t)]dt = 1 + Z1.5
0
n(t)dt
where n1is a zero-mean Gaussian random variable with variance
n1=EZ1.5
0Z1.5
0
2Z1.5
0
and n2is is a zero-mean Gaussian random variable with variance
n2=EZ2
1Z2
1
2Z2
1
The important fact here is that due to the overlap in the integration region n1and n2are not
independent. We first find the correlation between the two noise components. We have
N0
and the covariance matrix of the noise vector will be
C=
1.5 0.5
0.5 1
f(n1, n2) = 1
2π×√1.25 e
−0.4 1.2
n2
Thus, the vector representation of the received signal (at the output of the integrators) is
r= [1 + n1, n2]

47
The optimal decision region compares f(r|s1) and f(r|s2). But we have
f(r|s1) = fn1,n2(r1−1, r2)
Problem 4.47
1) The dimensionality of the signal space is two. An orthonormal basis set for the signal space is
formed by the signals
T,0≤t < T
2
T,T
2≤t < T
2) The optimal receiver is shown in the next figure
☛
✂
❘
❅
❅
✲
✲
✲
the
Select
t=T
2
r1
ψ1T
2−t
r(t)
3) This is a binary equiprobable system therefore we can use Pe=Qd
√2N0. We have
d2=ks1−s2k2
4) The signal waveform ψ1(T
2−t) matched to ψ1(t) is exactly the same with the signal waveform
ψ2(T−t) matched to ψ2(t). That is,
T,0≤t < T
2

48
Thus, the optimal receiver can be implemented by using just one filter with impulse response ψ1(t)
5) If s1(t) is transmitted, the received signal r(t) is
and if s2(t) is transmitted the received signal is
r(t) = s2(t) + 1
2s2t−T
2+n(t)
The outputs of the two samplers at t=T
2and t=T, which are equal to R∞
−∞ r(t)ψ1(t)dt and
R∞
−∞ r(t)ψ2(t)dt, respectively, are given by
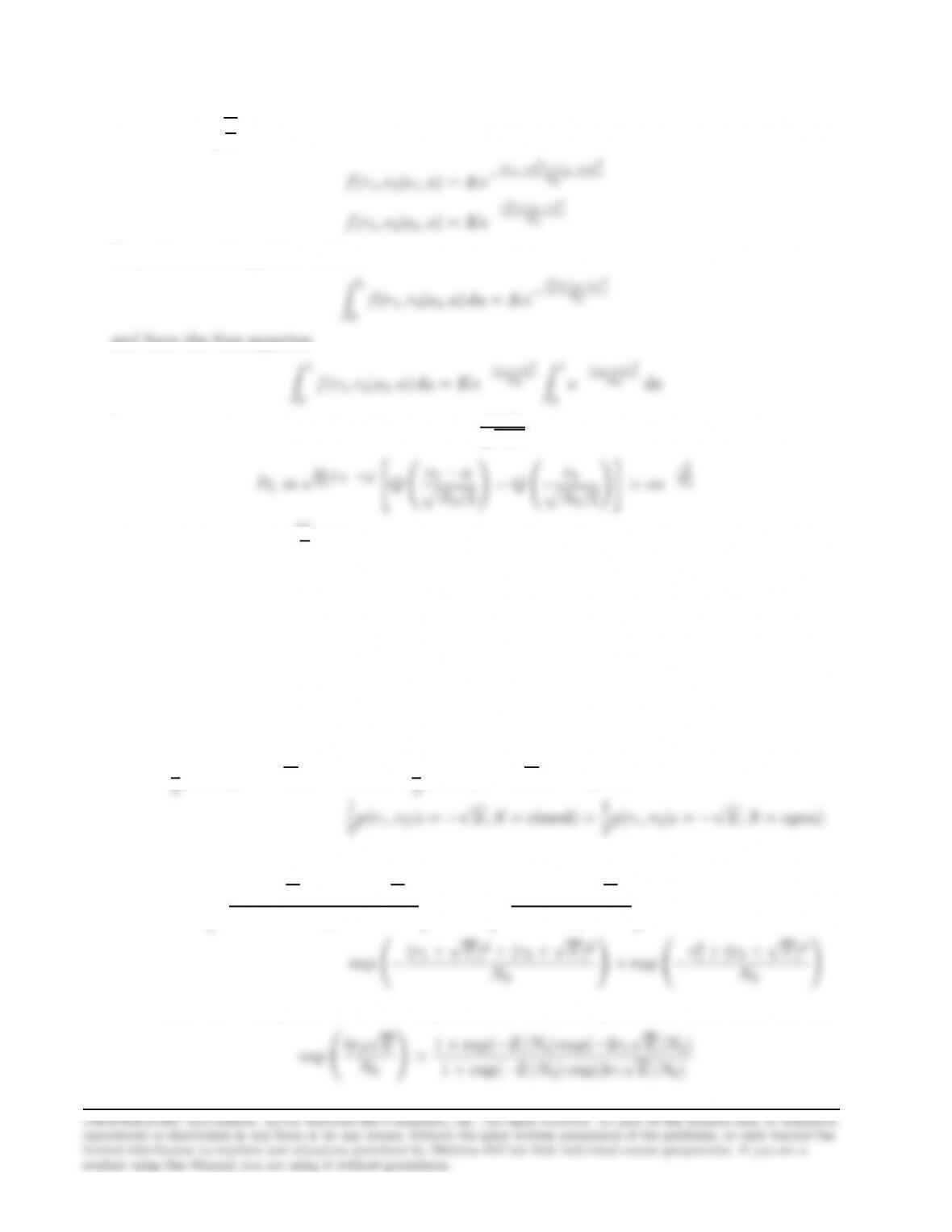
6) Here again we are comparing f(r1, r2|s1) and f(r1, r2|s2). But since ais random we have to use
f(r1, r2|sm) = Zf(a, r1, r2|sm)da =Zf(r1, r2|a, sm)f(a)da =Z1
0
f(r1, r2|a, sm)da
Similar to case 5, we have
49
where α=AqT
2. Therefore,
N0
f(r1, r2|s2, a) = Ke−r2
From the second equation we have
0
f(r1, r2|s2, a)da =Ke−r2
and from the first equation
0
f(r1, r2|s1, a)da =Ke−(r1−α)2
0
e−(r2−aα)2
Introducing a change of variable of the form β=r2−aα
√N0/2and manipulating we obtain
D1⇔e2α
N0(r1−r2)“Q r2−α
pN0/2!−Q r2
pN0/2!#> αe−r2
2
N0
where as before α=AqT
2. This approach is quite similar to the approach taken when analyzing
noncoherent systems and as you see the resulting equations are nonlinear as in that case.
Problem 4.48
1. The receiver does not know the status of the switch: A decision in favor of s1(t) is made if
1
resulting in
exp −(r1−√E)2+ (r2−√E)2
N0!+ exp −r2
1+ (r2−√E)2
N0!>
1+ (r2+√E)2
which can be simplified to the following form after eliminating common terms from both sides

2. The receiver knows the position of the switch: If the switch is open, then r1=n1is irrelevant
that can be ignored by the receiver, thus receiver decides based on r2only and the decision
threshold is 0. If Sis closed then the receiver detects s1(t) if
p(r1, r2|s=√E)> p(r1, r2|s=−√E)
or
or simply r1+r2>0. In this case an error occurs if −√Eis sent and r1+r2>0, i.e.,
if −√E+n1−√E+n2>0 or if n1+n2>2√E. Since n1and n2are iid Gaussian
3. Transmitter and receiver both know the position of S: If S is open, then the transmitter sends
all energy on the second channel, i.e., α= 0 and β=√2. The resulting error probability in
this case is Q(p4E/N0). If Sis closed the decision rule in favor of s1(t) becomes
exp (r1−α√E)2/2N0exp (r2−β√E)2/2N0>exp (r1+α√E)2/2N0exp (r2+β√E)2/2N0

Problem 4.49
1. ˆs= arg max p(r|s) = pn1(r1−s)1
2pn2(r2−s) + 1
2pn2(r2+s). Since s=±√E, the term in
2. Here C=
11
2
1
21
and C−1=
4
3−2
3
−2
3
4
3
. This results in
sinh 2√E(r2−r1)> e−4
3. Here r(t) = (1 + A)s(t) + n(t) where the PSD of n(t) is N1+N2
2. The decision rule is
arg max 1
4. The setting is similar to case 1. The decision rule is arg max 1
2pn1(r1−s) (pn2(r2−s) + pn2(r2)).
Some reduction is possible,
D1⇔
cosh 2r2√E−E
2N2
cosh 2r2√E+E
2N2> e−4r1√E
N1−4r2√E
N2+E
N2
5. In this case r= ((1−A)s+n1, As+n2), and the decision rule becomes arg max 1
2pn1(r1)pn2(r2−
s) + 1
Problem 4.50

52
2. For a given value of awe have Pb=QapEb/N0. We have to average the above value
3. For large SNR values
Eb/N0
1 + Eb/N0
=1
1 + 1/(Eb/N0)≈1−1/(Eb/N0)≈(1 −1/(2Eb/N0))2
4. For an AWGN channel an error probability of 10−5is achieved at Eb/N0of 9.6 dB. For a
5. For orthogonal signaling and noncoherent detection Pb=1
Problem 4.51
Define φ1(t) = g1(t) and α=Rg2(t)g1(t)dt, then by Gram-Schmidt g2(t) = αφ1(t) + βφ2(t)
where φ2(t) is the normalized version of g2(t)−αg1(t), and β=√1−α2. Now from r(t) =
s1(t) + s2(t) + n(t) we have the following mappings