Archives

Electrical Engineering Appendix I Two wire Control 7 Target Table Useful Interpreting Circuit
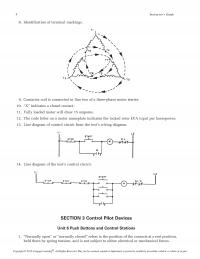
1. Line diagrams include all of the devices in the system and show the physical relationships between the devices. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Line Diagrams and Wiring Diagrams 2. The control circuit consists of the […]

Electrical Engineering Chapter 1 Motor Control Installation Considerations 7 Air Compressors Are
1. The common function of all controls is to control the operation of an electric motor. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Equipment that is tested and approved by UL is listed in a publication […]

Electrical Engineering Chapter 10 Air answer points references Pressure Switches And Regulators 7
1. Any industrial application that has a pressure-sensing requirement can use a pressure switch. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Pressure Switches and Regulators 2. A limited variety of pressure switches are available for control requirements of […]

Electrical Engineering Chapter 11 Bourdon Water Pressured Liquid Level answer points
1. The operation of a float switch is controlled by the forward or backward movement of a float placed in a water tank. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. An electrode, or stainless steel probe […]

Electrical Engineering Chapter 12 Bourdon Tube Bulb Paddle answer points
1. A flow switch either closes or opens a set of gates. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Flow Switches 2. Typical applications of flow switches are commonly found in the chemical and petroleum industries. a. True […]

Electrical Engineering Chapter 13 Micro limit Switches 7 Pancake type Solid state Sensors Are Designed
1. Contacts must be selected according to the proper load. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Limit Switches 2. Limit switches may be momentary contact or maintained contact types. a. True b. False ANSWER: True POINTS: 1 […]

Electrical Engineering Chapter 14 Solid state Phase Monitoring Relay Provides Protection
1. If two phases of the supply to a three-phase induction motor are interchanged, the motor will stop. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. The sensing network continuously monitors the motor line currents. a. True […]

Electrical Engineering Chapter 15 Solenoid Valve Operates When Current Applied
1. Valves are mechanical devices designed to control the flow of fluids. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. A solenoid valve is a combination of three basic units. a. True b. False ANSWER: False POINTS: […]

Electrical Engineering Chapter 16 Answer Points References Expansion Metal The Bimetal
1. Electrical contacts must never be permitted to open or close slowly. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Expansion of Metal 2. A bimetal strip is often formed into a spiral. a. True b. False ANSWER: True […]

Electrical Engineering Chapter 17 Two wire Controls 7 Typical Control Voltages Are 120
1. A two-wire control may be a toggle switch. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Two-Wire Controls 2. A two-wire control may be any type of switch having a graduated position. a. True b. False ANSWER: False […]

Electrical Engineering Chapter 18 Three wire Controls 7 What The First Action When
1. In a three-wire control circuit, when the supply voltage returns after a failure, the circuit is re-energized. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Three-Wire Controls 2. Pilot lights are tested frequently to ensure operation. a. True […]

Electrical Engineering Chapter 19 Selector push buttons cannot combine the operation
1. A hand-off automatic switch may be a stand alone control or incorporated into a start-stop push button station. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. A C on an HOA switch indicates that the contacts […]

Electrical Engineering Chapter 2 Fractional Horsepower Manual Motor Starters7 Manual Starter
1. Large motors should be connected directly across the line on startup. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Fractional Horsepower Manual Motor Starters 2. In the event of a power failure, a manual starter motor automatically restarts […]

Electrical Engineering Chapter 20 Name Class Date Unit Multiple Pushbutton Stations
1. The conventional three-wire, push-button control circuit may be extended by the addition of one or more push-button control stations. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. The operation of each additional push-button control station is […]

Electrical Engineering Chapter 21 Mechanical Interlocking Device Assembled The Factory
1. The direction of rotation of three-phase motors can be reversed by interchanging any two-motor leads to the line. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Push-button interlocking is an electrical method of preventing both starter […]

Electrical Engineering Chapter 22 Logic Concept And Control Function 8 Input Accessories
1. Main or subassembly line conveyors use sequence control. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. The input section of control consists of contactors, starters, solenoids, power magnetic amplifiers, electronic and solid state contactors. a. True […]

Electrical Engineering Chapter 23 Points References Jogging Using Control Relay The
1. The term inching is often used when referring to across-the-line starters. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. Neither jogging nor inching prevent a holding circuit. a. True b. False ANSWER: False POINTS: 1 REFERENCES: […]

Electrical Engineering Chapter 24 The Voltage Failure Exceeds The Time delay
1. There is a possibility of injury to an operator when the power suddenly resumes after a voltage failure. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. It is desirable to provide some means of automatically restarting […]

Electrical Engineering Chapter 25 The Motor 8 The Most Common Function Reduced
1. In a squirrel cage motor, the rotor is constructed of steel laminations mounted rigidly on the motor shaft. a. True b. False ANSWER: True POINTS: 1 REFERENCES: The Motor 2. Locked rotor currents for different motor types vary from […]

Electrical Engineering Chapter 26 Primary Resistor type Starters 7 Primary Resistor Starters Are
1. With primary resistor-type starters, a resistor is connected in parallel in the lines to the motor. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Primary Resistor-Type Starters 2. Primary resistor starters provide closed transition starting. a. True b. […]

Electrical Engineering Chapter 27 Autotransformer Starters 7 Auto transformer type Starter Autotransformers Supply Of
1. Most motors are successfully started at 90 percent of line voltage. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Autotransformer Starters 2. The starting transformers are inductive loads. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Autotransformer […]

Electrical Engineering Chapter 28 Part Winding Starters Are Not Suitable
1. Part winding motors are different in construction from standard squirrel cage motors. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. Part winding motor windings are intended to operate in series. a. True b. False ANSWER: False […]

Electrical Engineering Chapter 29 Applications 8 The Motor Nameplate Indicates Only The
1. Star-delta motor starting is sometimes called double-delta starting. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. Star-delta motors are similar in construction to standard squirrel cage motors. a. True b. False ANSWER: True POINTS: 1 REFERENCES: […]

Electrical Engineering Chapter 3 Contacts 7 Overload Relays React Only Current
1. Magnetic starters can be controlled remotely. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. The magnetic flux produced by the shading coil follows the direction of the flux of the main field. a. True b. False […]

Electrical Engineering Chapter 30 The Need For Solid state Control 7 Solid state Starters
1. Electromechanical devices are used to provide interlocking methods and sequencing control. a. True b. False ANSWER: True POINTS: 1 REFERENCES: The Need for Solid-State Control 2. Solid-state starters are available in ranges up to several hundred horsepower. a. True […]

Electrical Engineering Chapter 31 The Motor 7 The Operating Principle Which The
1. The squirrel cage induction motor is the most widely used industrial motor. a. True b. False ANSWER: True POINTS: 1 REFERENCES: The Motor 2. The design of the motor will determine the percentage of slip. a. True b. False […]

Electrical Engineering Chapter 32 Four speed Consequent Pole Motors Have Two
1. A three-phase squirrel cage motor can be wound so that six leads are brought out. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Two-speed, consequent pole motors have one reconnectable winding. a. True b. False ANSWER: […]

Electrical Engineering Chapter 33 Operational Sequence 8 When Compelling Relay Used A
1. Four-speed, consequent pole, squirrel cage motors have two reconnectable windings and two speeds for each winding. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Multispeed starters are provided with mechanical and electrical interlocking. a. True b. […]

Electrical Engineering Chapter 34 Wound Rotor Motors And
1. Thephrase“woundrotor”describestheconstructionoftherotor. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Wound Rotor Motors and Manual Speed Control 2. The induced current remains constant in the wound rotor motor. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Wound Rotor […]

Electrical Engineering Chapter 35 Pushbutton Speed Selection 6 Magnetic Controllers
1. The number of accelerating contactors depends on the desired number of speeds for the motor. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Push-Button Speed Selection 2. The motor starts slowly with full resistance in the primary circuit. […]

Electrical Engineering Chapter 36 Resistors on starters with three or more steps
1. The wiring of the accelerating starters and the design of the resistor sections are meant for speed regulation. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. The operation of accelerating contactors is controlled by a timing […]

Electrical Engineering Chapter 37 Name Class Date Unit Automatic Speed Control
1. Pilot control devices are often employed to control the operation of a wound rotor induction motor. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Theoverloadrelayforawoundrotormotorcontainstwosetsofcontacts,bothnormallyclosed. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 3. […]

Electrical Engineering Chapter 38 Answer Points References Solid state Adjustable Speed Controller
1. An ideal solid-state adjustable speed controller is a modern, energy-saving method of controlling motor speed. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Solid-State Adjustable Speed Controller 2. Electronic circuitry is arranged on plug-in circuit cards. a. True […]

Electrical Engineering Chapter 39 Stator Available Contactor answer points
1. A distinguishing feature of the synchronous motor is that it runs without slip at a speed determined by the frequency of the connected power source and the number of poles it contains. a. True b. False ANSWER: True POINTS: […]

Electrical Engineering Chapter 4 The Movable Contact For Normally Closed
1. The most standardized set of symbols in the United States is provided by the NEMA. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Normally open switches are drawn with the movable contact above and touching the […]

Electrical Engineering Chapter 40 Pushbutton Synchronizing 7 The Accompanying Figure The Rotating
1. There is one basic function of synchronous motor control in starting. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Push-Button Synchronizing 2. The principal difference between synchronous motor control and induction motor control is in the control of […]

Electrical Engineering Chapter 41 Accelerating Current Time delay Over
1. In the accompanying figure, the timing relay coil (TR) is energized with the secondary starter coil (F). a. True b. False ANSWER: False POINTS: 1 REFERENCES: Timed Semiautomatic Synchronizing 2. In the accompanying figure, the timer setting should […]

Electrical Engineering Chapter 42 Rotor Control Equipment 7 Solenoid operated Field Contactor Similar
1. An automatic synchronous motor starter can be used with a synchronous motor to provide automatic control of the startup sequence. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. There are three basic methods of starting synchronous […]

Electrical Engineering Chapter 43 Motor Construction 7 Three Types Industrial Motors Are
1. By controlling the ohms supplied to the motor windings, a wide range of motor speeds can be obtained. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Application 2. The essential features and parts of DC motors and generators […]

Electrical Engineering Chapter 44 Starting 6 Two Factors That Limit The Current
1. The starting of fairly large DC motors requires that current be increased gradually and at the same time resistance must be inserted in series with the armature of the motor. a. True b. False ANSWER: False POINTS: 1 REFERENCES: […]

Electrical Engineering Chapter 45 In one of the control methods to start a DC motor
1. Small DC motors can be connected directly across the line for starting. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Across-the-Line Starting 2. Magnetic across-the-line control of small DC motors is very different from AC control. a. True […]

Electrical Engineering Chapter 46 Compensating Time Acceleration 7 The Field Accelerating Relay
1. When a DC motor starts, the generated counter emf across the armature is low. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Counter EMF Controller 2. A field accelerating relay is used with starters to control low-cost speed […]

Electrical Engineering Chapter 47 Power Conversion And Control 7 Because There Counter
1. DC motors can be operated at a slow speed with a high torque. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Power Conversion and Control 2. If it is necessary to operate the motor above base speed, the […]

Electrical Engineering Chapter 48 Plugging Switches And Applications 8 The Plugging Switch
1. Plugging controls provide for the rapid stop and quick reversal of motor rotation. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Standard reversing controllers cannot be plugged manually. a. True b. False ANSWER: False POINTS: 1 […]

Electrical Engineering Chapter 49 Introduction 7 Magnetically Operated Brake The Shoes Are
1. Electric brakes have been in use since the early 1900s. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. An electric brake consists of three friction surfaces, or shoes. a. True b. False ANSWER: False POINTS: 1 […]

Electrical Engineering Chapter 50 Connecting The Armature Resistance And The
1. A motor should be stopped by dynamic braking alone. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. Dynamic braking is a complex but safe method of emergency or safety braking. a. True b. False ANSWER: False […]

Electrical Engineering Chapter 51 Application 7 Taps Current limiting Resistors Provide Means Adjusting
1. Electronic brakes require extensive maintenance, adjustment, and periodic replacement of worn parts. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Application 2. Three-phase electric braking reduces the heat buildup in the motor as compared to single-phase braking. a. […]

Electrical Engineering Chapter 52 Directly Coupled Drive Installation 7 Induction Motors Are
1. The most economical speed for an electrical motor is about 1800 revolutions per minute. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Directly Coupled Drive Installation 2. It has been suggested that synchronous motors are more expensive to […]

Electrical Engineering Chapter 53 Gear Motors 7 Gear Motor Usually Consists
1. In a few cases, industrial machines require power at slow speeds and high torque. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Gear Motors 2. The gear motor is a speed-reducing motor. a. True b. False ANSWER: True […]

Electrical Engineering Chapter 54 Variable frequency Mechanical Drives 7 Cases Where More Than
1. A frequency changer may be used to vary the speed of AC squirrel cage induction motors. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Variable-Frequency Mechanical Drives 2. There is only one method used for one or more […]

Electrical Engineering Chapter 55 Drive Operating Principles 8 Many
1. DC motors are still used in many industries. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. Variable-frequency drives control motor speed by controlling the frequency of the power supplied to the motor. a. True b. False […]

Electrical Engineering Chapter 56 Electrically Controlled Magnetic Clutches7 Double face Clutch Both
1. Machinery clutches were originally designed to engage very large motors to their loads after the motors had reached running speeds. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Electrically Controlled Magnetic Clutches 2. The single-face clutch consists of […]

Electrical Engineering Chapter 57 Answer Points References Introduction The Motor generator Set
1. Packaged variable speed drives generally operate on AC. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Introduction 2. The AC service in industrial plants can not be converted to direct current for use with DC variable-speed controls. a. […]

Electrical Engineering Chapter 58 The self-synchronous transmission system is a
1. If you set your alarm clock or clock radio to wake your household in the morning, you have programmed a controller. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Programmable Controllers 2. Input modules sense whether the input […]

Electrical Engineering Chapter 59 How Find Intermittent Fault For Resistor Failure
1. After new motors and controls are installed, they should be checked for operation under load for an initial period of at least one hour. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Motor Startup 2. Ball-bearing motors can […]

Electrical Engineering Chapter 6 Push Buttons 7 Normally Open And Normally Closed
1. Two sets of momentary contacts are usually provided with push buttons. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Push Buttons 2. Some double-break contacts are made of gold. a. True b. False ANSWER: False POINTS: 1 REFERENCES: […]

Electrical Engineering Chapter 60 Voltmeter Basics The Total Applied Voltage Series
1. Plunger-type voltage testers are high-impedance devices and require several milliamperes to operate. a. True b. False ANSWER: False POINTS: 1 REFERENCES: Introduction 2. It is often necessary to troubleshoot a circuit with power applied to the circuit. a. True […]

Electrical Engineering Chapter 7 Solid state Relays Generally Apply
1. Control magnetic relays are used to control small loads. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Control Relays 2. Most of the relays used in machine tool control have double-break contacts. a. True b. False ANSWER: True […]

Electrical Engineering Chapter 8 Answer Points References Contactors Arcquenching Device Used
1. The larger contactor sizes are used to provide remote control of relatively high-current circuits where it is too expensive to run the power leads to the remote controlling location. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Contactors […]

Electrical Engineering Chapter 9 Electronic Timers 8 Off delay Timers Must Have Power
1. Timing relays are used for any application where the operating sequence requires a delay. a. True b. False ANSWER: True POINTS: 1 REFERENCES: Application 2. Pneumatic timers have good repeat accuracy. a. True b. False ANSWER: True POINTS: 1 […]

Mechanical Engineering Section 1

Mechanical Engineering Section 10

Mechanical Engineering Section 11

Mechanical Engineering Section 12

Mechanical Engineering Section 2
Mechanical Engineering Section 3

Mechanical Engineering Section 4

Mechanical Engineering Section 5

Mechanical Engineering Section 6
Mechanical Engineering Section 7

Mechanical Engineering Section 8

Mechanical Engineering Section 9
